1
Изобретение относится к труботранспорту жидких и газообразных сред и может найти применение при ремонтных работах по замене соединяющего два параллельных трубопровода колена, а также в случаях, когда необходимо зафиксировать начальное межосевое расстояние двух параллельных цилиндрических тел.
Известно устройство для временной фиксации двух параллельных трубопроводов,выполненное в виде охватывающего трубопровод корпуса и размещенного внутри него зажима, взаимодействующего с рычагами, имеющими фигурные гнезда для охвата обеих труб 1.
Однако из-за отсутствия возможности вьь равнивания усилия затяжки на поверхности обеих труб крепление остается ненадежным.
Наиболее близко к данному изобретению по техническому рещению устройство для временной фиксации двух параллельных трубопроводов, выполненное в виде охватывающего их и опирающегося на верхний трубопровод корпуса и размещенных в нем двух соответствующих трубопроводам зажи.мов и механизма их ручноГо привода, при этом
каждый из зажимов имеет пару подвижных губок и перемещающие их к стенкам трубопровода пары рычагов, из которых каждая пара рычагов нижнего зажима своими средними участками связана с одной из подвижных губок, нижними концами - с механизмом ручного привода, а в отверстиях верхних концов расположена общая для этих рычагов ось 2.
Недостатком этого устройства является ненадежность фиксации из-за возможности изменения положения осей закрепляемых трубопровод,ов, обусловленного жесткостью кинематики конструкции и неравномерности распределения приводного усилия между обоими зажимами.
Целью изобретения является повышение
5 надежности фиксации путем обеспечения равномерности распределения приводного усилия между зажимами, для чего отверстия в верхних концах каждой пары рычагов нижнего зажима выполнены в виде пазов, а
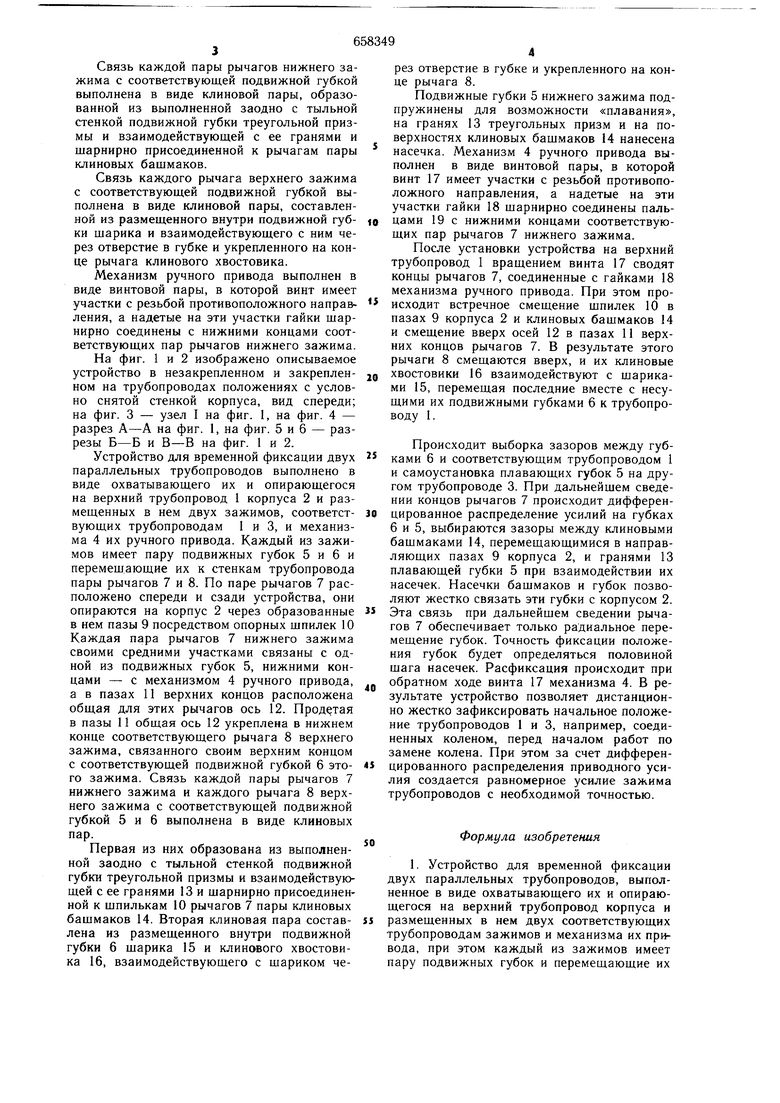
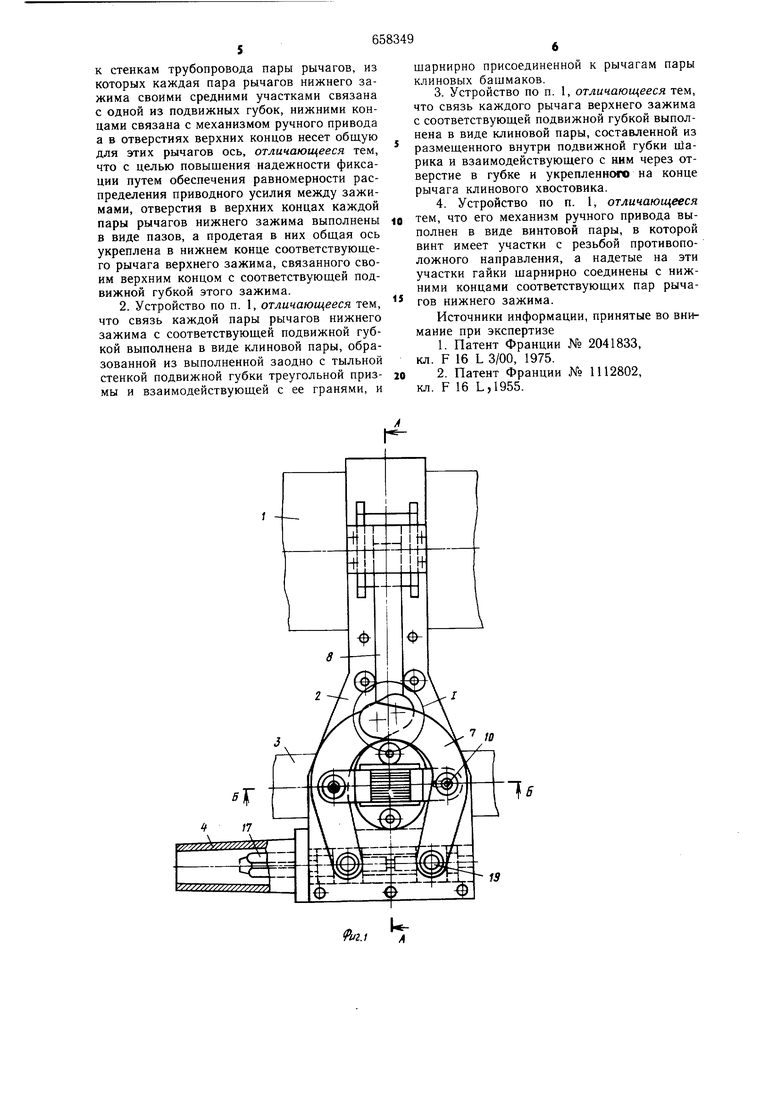
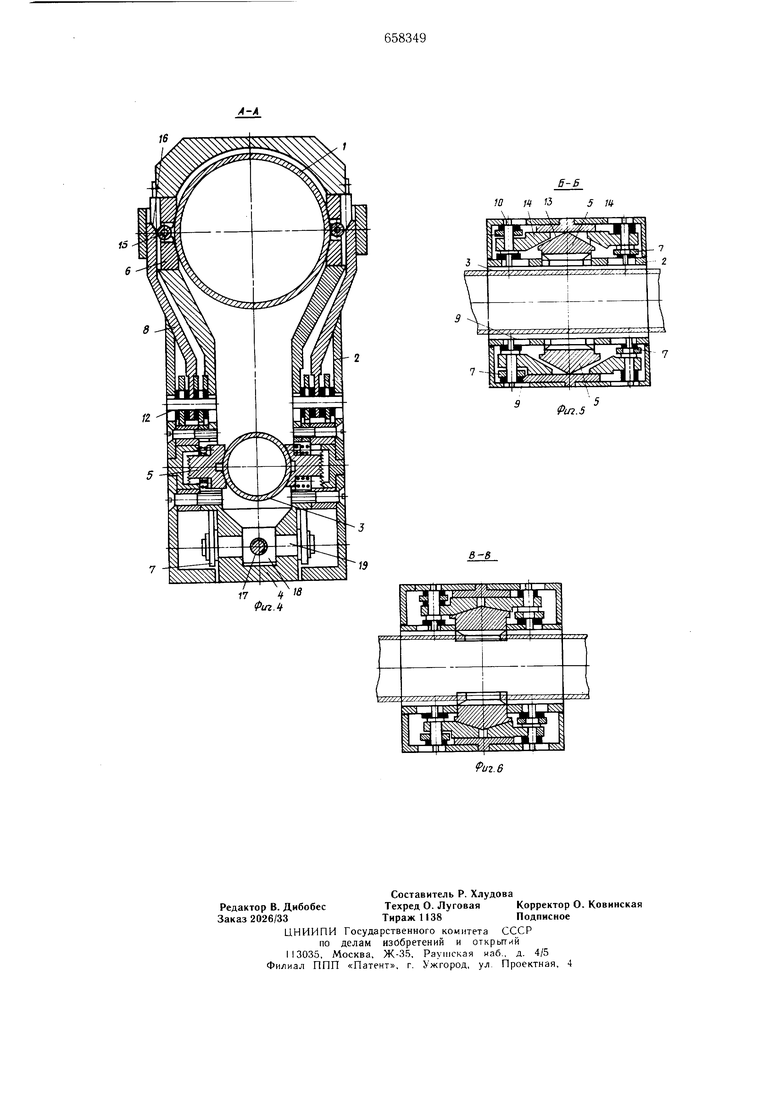
0 продетая в них общая ось укреплена в нижнем конце соответствующего рычага верхнего зажима, связанного своим верхним концом с соответствующей подвижной губкой этого зажима. Связь каждой пары рычагов нижнего зажима с соответствующей подвижной губкой выполнена в виде клиновой пары, образованной из выполненной заодно с тыльной стенкой подвижной губки треугольной призмы и взаимодействующей с ее гранями и щарнирно присоединенной к рычагам пары клиновых бащмаков. Связь каждого рычага верхнего зажима с соответствующей подвижной губкой выполнена в виде клиновой пары, составленной из размещенного внутри подвижной губки щарика и взаимодействующего с ним через отверстие в губке и укрепленного на конце рычага клинового хвостовика. Механизм ручного привода выполнен в виде винтовой пары, в которой винт имеет участки с резьбой противоположного направления, а надетые на эти участки гайки щарнирно соединены с нижними концами соответствующих пар рычагов нижнего зажима. На фиг. 1 и 2 изображено описываемое устройство в незакрепленном и закрепленном на трубопроводах положениях с условно снятой стенкой корпуса, вид спереди; на фиг. 3 - узел I на фиг. I, на фиг. 4 - разрез А-А на фиг. 1, на фиг. 5 и 6 - разрезы Б-Б и В-В на фиг. 1 и 2. Устройство для временной фиксации двух параллельных трубопроводов выполнено в виде охватывающего их и опирающегося на верхний трубопровод 1 корпуса 2 и размещенных в нем двух зажимов, соответствующих трубопроводам 1 и 3, и механизма 4 их ручного привода. Каждый из зажимов имеет пару подвижных губок 5 и 6 и перемещающие их к стенкам трубопровода пары рычагов 7 и 8. По паре рычагов 7 расположено спереди и сзади устройства, они опираются на корпус 2 через образованные в нем пазы 9 посредством опорных щпилек 10 Каждая пара рычагов 7 нижнего зажима своими средними участками связаны с одной из подвижных губок 5, нижними концами - с механизмом 4 ручного привода, а в пазах 11 верхних кондов расположена общая для этих рычагов ось 12. Продетая в пазы 11 общая ось 12 укреплена в нижнем конце соответствующего рычага 8 верхнего зажима, связанного своим верхним концом с соответствующей подвижной губкой 6 этого зажима. Связь каждой пары рычагов 7 нижнего зажима и каждого рычага 8 верхнего зажима с соответствующей подвижной губкой 5 и 6 выполнена в виде клиновых пар. Первая из них образована из выполненной заодно с тыльной стенкой подвижной губки треугольной призмы и взаимодействующей с ее гранями 13 и щарнирно присоединенной к щпилькам 10 рычагов 7 пары клиновых бащмаков 14. Вторая клиновая пара составлена из размещенного внутри подвижной губки б щарика 15 и клинового хвостовика 16, взаимодействующего с щариком через отверстие в губке и укрепленного на конце рычага 8. Подвижные губки 5 нижнего зажима подпружинены для возможности «плавания, на гранях 13 треугольных призм и на поверхностях клиновых бащмаков 14 нанесена насечка. Механизм 4 ручного привода выполнен в виде винтовой пары, в которой винт 17 имеет участки с резьбой противоположного направления, а надетые на эти участки гайки 18 щарнирно соединены пальцами 19 с нижними концами соответствующих пар рычагов 7 нижнего зажима. После установки устройства на верхний трубопровод 1 вращением винта 17 сводят концы рычагов 7, соединенные с гайками 18 механизма ручного привода. При этом происходит встречное смещение щпилек 10 в пазах 9 корпуса 2 и клиновых бащмаков 14 и смещение вверх осей 12 в пазах 11 верхних концов рычагов 7. В результате этого рычаги 8 смещаются вверх, и их клиновые хвостовики 16 взаимодействуют с щариками 15, перемещая последние вместе с несущими их подвижными губками 6 к трубопроводу 1. Происходит выборка зазоров между губками 6 и соответствующим трубопроводом 1 и самоустановка плавающих губок 5 на другом трубопроводе 3. При дальнейщем сведении концов рычагов 7 происходит дифференцированное распределение усилий на губках 6 и 5, выбираются зазоры между клиновыми бащмаками 14, перемещающимися в направляющих пазах 9 корпуса 2, и гранями 13 плавающей губки 5 при взаимодействии их насечек. Насечки бащмаков и губок позволяют жестко связать эти губки с корпусом 2. Эта связь при дальнейщем сведении рычагов 7 обеспечивает только радиальное перемещение губок. Точность фиксации положения губок будет определяться половиной шага насечек. Расфиксация происходит при обратном ходе винта 17 механизма 4. В результате устройство позволяет дистанционно жестко зафиксировать начальное положение трубопроводов 1 и 3, например, соединенных коленом, перед началом работ по замене колена. При этом за счет дифференцированного распределения приводного усилия создается равномерное усилие зажима трубопроводов с необходимой точностью. Формула изобретения 1. Устройство для временной фиксации двух параллельных трубопроводов, выполненное в виде охватывающего их и опирающегося на верхний трубопровод корпуса и размещенных в нем двух соответствующих трубопроводам зажимов и механизма их привода, при этом каждый из зажимов имеет пару подвижных губок и перемещающие их
к стенкам трубопровода пары рычагов, из которых каждая пара рычагов нижнего зажима своими средними участками связана с одной из подвижных губок, нижними концами связана с механизмом ручного привода а в отверстиях верхних концов несет общую для этих рычагов ось, отличающееся тем, что с целью повышения надежности фиксации путем обеспечения равномерности распределения приводного усилия между зажимами, отверстия в верхних концах каждой пары рычагов нижнего зажима выполнены в виде пазов, а продетая в них общая ось укреплена в нижнем конце соответствующего рычага верхнего зажима, связанного своим верхним концом с соответствующей подвижной губкой этого зажима.
2. Устройство по п. 1, отличающееся тем, что связь каждой пары рычагов нижнего зажима с соответствующей подвижной губкой выполнена в виде клиновой пары, образованной из выполненной заодно с тыльной стенкой подвижной губки треугольной призмы и взаимодействующей с ее гранями, и
щарнирно присоединенной к рычагам пары клиновых бащмаков.
3.Устройство по п. 1, отличающееся тем, что связь каждого рычага верхнего зажима с соответствующей подвижной губкой выполнена в виде клиновой пары, составленной из размещенного внутри подвижной губки ц1арика и взаимодействующего с ним через отверстие в губке и укрепленного на конце рычага клинового хвостовика.
4.Устройство по п. 1, отличающееся тем, что его механизм ручного привода выполнен в виде винтовой пары, в которой винт имеет участки с резьбой противоположного направления, а надетые на эти участки гайки щарнирно соединены с нижними концами соответствующих пар рычагов нижнего зажима.
Источники информации, принятые во внимание при экспертизе
1. Патент Франции № 2041833 кл. F 16 L 3/00, 1975. 2. Патент Франции № 1112802 кл. F 16 L,1955.
13
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕЦИЗИОННЫЕ ТИСКИ | 1992 |
|
RU2036072C1 |
| Установка для сварки | 1985 |
|
SU1384359A1 |
| Устройство для подачи прямой нити накала к электродам лампы-фотовспышки | 1973 |
|
SU479178A1 |
| Устройство для сборки труб различного диаметра под сварку | 1989 |
|
SU1764917A1 |
| МЕХАНИЧЕСКИЕ ПЯЛЬЦЫ ДЛЯ РУЧНОЙ ВЫШИВКИ | 1969 |
|
SU239020A1 |
| Захват к устройству для перемещения материала | 1980 |
|
SU1039615A1 |
| Подъемник скользящей опалубки (его варианты) | 1982 |
|
SU1106885A1 |
| ПРЕЦИЗИОННЫЕ ТИСКИ | 1993 |
|
RU2072907C1 |
| Захват промышленного робота | 1980 |
|
SU891435A1 |
| Сшиватель органов | 1973 |
|
SU566573A1 |
2
U.}
16
IS
/2
S-S
Pu2.5
