(54) ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| Захват промышленного робота | 1980 |
|
SU887157A1 |
| Захват промышленного робота | 1981 |
|
SU963852A1 |
| Кисть механической руки промышленногоРОбОТА | 1979 |
|
SU841961A1 |
| Захват | 1980 |
|
SU937140A1 |
| Схват очувствленного робота | 1984 |
|
SU1227464A1 |
| Захват | 1978 |
|
SU768635A1 |
| Захват манипулятора | 1979 |
|
SU844262A1 |
| Захват манипулятора | 1990 |
|
SU1834796A3 |
1
Изобретение относится к машиностроению и предназначено для использования в промышленных роботах, применяемых для механизации и автоматизации вспомогательных технологических операций при механической обработке, штамповке и сборке.
Известен захват промышленного робота, содержащий корпус, привод с редуктором, направляющие, зажимные губки, шарнирные многозвенники и механизм фиксации с клиновым шариковым зажимом 1.
Недостатком известного устройства является сложность, конструкции.
Цель изобретения - упрощение конструкции.
Цель дост11гается тем, что захват снабжен эксцентриками и тягами, связанными с этими эксцентриками с помощью шарнирных многозвенников, причем последние установлены на съемном захвате.
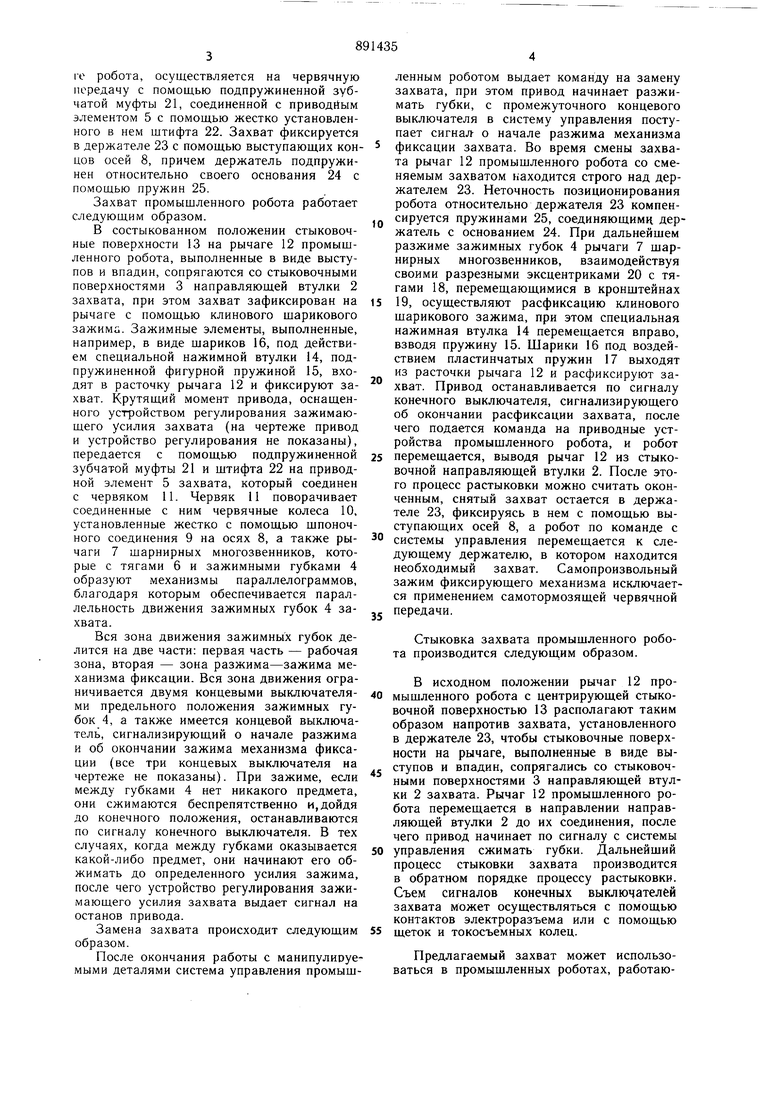
На фиг. 1 изображен предлагаемый захват промышленного робота в разрезе; вид сбоку; на фиг. 2 - положение захвата в держателе, вид сверху.
Захват промышленного робота содержит корпус 1, с прикрепленной к нему стыковочной направляющей втулкой 2 с фасонными
впадинами и выступами 3, зажимные губки 4, связанные с корпусом и приводным элементом 5 с помощью тяг 6 и рычагов 7, соединенных осями 8, на каждой из которых с помошью шпонки 9 зафиксировано червячное колесо 10, соединенное с червяком 11. Захват фиксируется на последнем рычаге 12 промышленного робота, на цилиндрической поверхности которого расположена центрирующая стыковочная поверхность 13, включающая идентичные выступы и впадины, а фиксация осуществляется клиновым шариtoковым зажимом, состоящим из клинового устройства, выполненного в виде специальной нажимной втулки с конической поверхностью 14, подпружиненной с помощью фигурной пружины 15 (фиг. 2), а также из нескольких зажимных элементов, например
IS шариков 16, зафиксированных от выпадания во втулке с помощью пластинчатых пружИн 17.
Специальная нажимная втулка связана с помощью тяг 18, имеющих возможность перемещения в кронштейнах 19, с эксцентри20ками 20, выполненными совместно с рычагами 7. Передача крутящего момента с привода, расположенного на последнем рычаre робота, осуществляется на червячную передачу с помощью подпружиненной зубчатой муфты 21, соединенной с приводйым элементом 5 с помощью жестко установленного в нем щтифта 22. Захват фиксируется в держателе 23 с помощью выступающих концов осей 8, причем держатель подпружинен относительно своего основания 24 с помощью пружин 25.
Захват промышленного робота работает следующим образом.
В состыкованном положении стыковочные поверхности 13 на рычаге 12 промышленного робота, выполненные в виде выступов и впадин, сопрягаются со стыковочными поверхностями 3 направляющей втулки 2 захвата, при этом захват зафиксирован на рычаге с помощью клинового шарикового зажима. Зажимные элементы, выполненные, например, в виде щариков 16, под действием специальной нажимной втулки 14, подпружиненной фигурной пружиной 15, входят в расточку рычага 12 и фиксируют захват. Крутящий момент привода, оснащенного устройством регулирования зажимающего УСИЛИЯ захвата (на чертеже привод и устройство регулирования не показаны), передается с помощью подпружиненной зубчатой муфты 21 и щтифта 22 на приводной элемент 5 захвата, который соединен с червяком И. Червяк 11 поворачивает соединенные с ним червячные колеса 10, установленные жестко с помощью щпоночного соединения 9 на осях 8, а также рычаги 7 шарнирных многозвенников, которые с тягами 6 и зажимными губками 4 образуют механизмы параллелограммов, благодаря которым обеспечивается параллельность движения зажимных губок 4 захвата.
Вся зона движения зажимных губок делится на две части: первая часть - рабочая зона, вторая - зона разжима-зажима механизма фиксации. Вся зона движения ограничивается двумя концевыми выключателями предельного положения зажимных губок 4, а также имеется концевой выключатель, сигнализирующий о начале разжима и об окончании зажима механизма фиксации (все три концевых выключателя на чертеже не показаны). При зажиме, если между губками 4 нет никакого предмета, они сжимаются беспрепятственно и, дойдя до конечного положения, останавливаются по сигналу конечного выключателя. В тех случаях, когда между губками оказывается какой-либо предмет, они начинают его обжимать до определенного усилия зажима, после чего устройство регулирования зажимающего усилия захвата выдает сигнал на останов привода.
Замена захвата происходит следующим образом.
После окончания работы с манипулиоуемыми деталями система управления промышленным роботом выдает команду на замену захвата, при этом привод начинает разжимать губки, с промежуточного концевого выключателя в систему управления поступает сигнал о начале разжима механизма
фиксации захвата. Во время смены захвата рычаг 12 промыщленного робота со сменяемым захватом находится строго над держателем 23. Неточность позиционирования робота относительно держателя 23 компенQ сируется пружинами 25, соединяющими держатель с основанием 24. При дальнейшем разжиме зажимных губок 4 рычаги 7 щарнирных многозвенников, взаимодействуя своими разрезными эксцентриками 20 с тягами 18, перемещающимися в кронштейнах
19, осуществляют расфиксацию клинового щарикового зажима, при этом специальная нажимная втулка 14 перемещается вправо, взводя пружину 15. Шарики 16 под воздействием пластинчатых пружин 17 выходят из расточки рычага 12 и расфиксируют захват. Привод останавливается по сигналу конечного выключателя, сигнализирующего об окончании расфиксации захвата, после чего подается команда на приводные устройства промыщленного робота, и робот
5 перемещается, выводя рычаг 12 из стыковочной направляющей втулки 2. После этого процесс растыковки можно считать оконченным, снятый захват остается в держателе 23, фиксируясь в нем с помощью выступающих осей 8, а робот по команде с системы управления перемещается к следующему держателю, в котором находится необходимый захват. Самопроизвольный зажим фиксирующего механизма исключается применением самотормозящей червячной
J передачи.
Стыковка захвата промыщленного робота производится следующим образом.
В исходном положении рычаг 12 промышленного робота с центрирующей стыковочной поверхностью 13 располагают таким образом напротив захвата, установленного в держателе 23, чтобы стыковочные поверхности на рычаге, выполненные в виде выступов и впадин, сопрягались со стыковочными поверхностями 3 направляющей втулки 2 захвата. Рычаг 12 промыщленного робота перемещается в направлении направляющей втулки 2 до их соединения, после чего привод начинает по сигналу с системы 0 управления сжимать губки. Дальнейщий процесс стыковки захвата производится в обратном порядке процессу растыковки. Съем сигналов конечных выключателей захвата может осуществляться с помощью контактов электроразъема или с помощью 5 щеток и токосъемных колец.
Предлагаемый захват может использоваться в промышленных роботах, работающих как с основным, так и вспомогательным оборудованием, и предна йаченных для выполнения подъемно-транспортных и монтажно-сборочных операций, например, в робототехнологических комплексах соответствующего назначения, т. е. там, где требует- s ся многократная и оперативная замена как захватов, так и другсто инструмента, которыми оснащается робот. Стоимость изготовления предлагаемого захвата по сравнению с известным по пред-10 варительным подсчетам будет ниже на 30-400/0, что составит экономию примерно в 400-500 руб. при изготовлении одного захвата. Проведенные испытания работоспособности захвата промышленного робота,5 показали его высокую надежность в работе.
2 16 /7 /« f f
I /// /2
// Формула изобретения Захват промыщленного робота, содержащий корпус, привод с редуктором, направляющие, зажимные губки, шарнирные многозвенники и механизм фиксации с клиновым шариковым зажимом, отличающийся тем, что, с целью упрощения констру(ции, он снабжен эксцентриками и тягами, связанными с этими эксцентриками с помощью шарнирных многозвенников, причем последние установлены на захвате, Источники информации, принятые во внимание при экспертизе 1. Колер Г. В. Захваты для универсальных дистанционных устройств. Экспрессинформация, «Подъемно-транспортные машины, 1977, № 11, реф. 83
