1
Изобретение относится к измерительной технике и может быть использовано в устройствах автоматического контроля искривления рельса по длине.,
Известно устройство контроля отклонений поверхности от заданного контура, в котором с целью повышения точности измерения формируют программные сигналы перемещения детали, измеряют сигналы действительного перемещения детали и по их разности формируют сигнал OJKлoнeния поверхности дetaли от заданного контура в момент касания поверхности детали с измерителем (1 .
Однако указанное устройство характеризуют незначительное быстродействие и надежность, вызванные необходимостью перемещать контролируемую деталь по заданной программе.
Наиболее близким к изобретению техническим, решением является устройство для контроля искривления рельса по длине, содержащее п измерительных щупов, два базирующих щупа, импульсные преобразователи перемещения измерительных щупов, п реверсивных счетчиков, первые входы которых соединены с выходами импульсных преобразователей перемещения измерительных щупов, регистратор, входы которого соединены с выходами реверсивных счетчиков и преобразователь координат контролируемых точек, входы которого соединены с базирующими щупами, а выходы подключены ко вторым входам реверсивных счетчиков 2}. Однако невысокая точность и незначительное быстродействие такого устройства обусловлены выполнением преобразователя координат контролируемых точек в виде следящих систем, копира хорды и кинематической цепи перемещения копира хорды.
Целью изобретения является повышение точности и оперативности контроля.
Это достигается тем, что преобразователь координат контролируемых точек выполнен
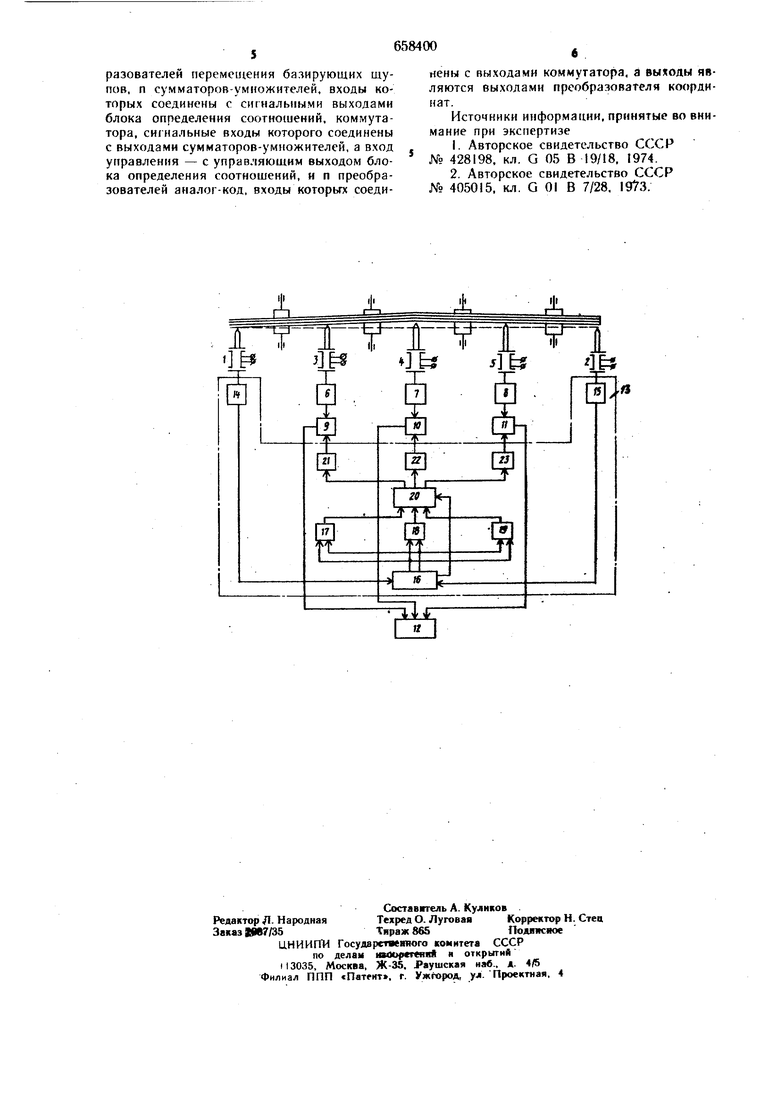
в виде двух преобразователей перемещения базирующих щупов, блока определения соотнои1ений, входы которого соединены с выходами преобразователей перемещения базирующих щупов, п сумматоров-умножитеС лей, входы которых соединены с сигнальными выходами блока определения соотнощений, коммутатора, сигнальные входы которого соединены с выходами сумматоров-умножителей, а вход управления - с управляюгиим выходом блока определения соотношение, и п преобразователей анолог-код, входы которого соединены с. выходами коммутатора, а выходы являются выходами преобразователя координат. На чертеже представлена структурная схема устройства. Устройство содержит два базирующих щупа 1, 2, измерительные щупы 3-5, механически связанные с импульсными преобразователями 6-8 перемещения, ренерсивные счетчики 9--11, на первые входы которых включены выходы импульсных преобразователей 6-8, регистратор 12, подключенный к выходам реверсивных счетчиков 9--11, и преобразователь 13 координат контролируемых точек, входы которого связаны с базирующими щупами , 2, а выходы - со вторыми входами реверсивных, счетчиков 9-11. Преобразователь координат контролируемых точек 13 состоит из преобразователей 14 и 15 перемещения базирующих щупов, выходы которых соединены с входами блока 16 определения соотношений. Выходы блока 16 соединены со входами сумматоров-умножителей 17-19, соединенных выходами с сигнальными входами коммутатора 20. Управляющий вход коммутатора соединен с управляющим выходом блока .16 определения соотнощ ний. Выходы коммутатора соединены со входами преобразовдтелей 21-23 аналог-код, выходы которых являются выходами преобразователя 13 координат контролируемых точек. Устройство работает следующим образом. Рельс по рольгангу поступает в зону действия устройства для контроля искривления рельса и блоком управления (на чертеже не показан) выдается команда на перемещение базирующих щупов 1, 2, установленных за бортом настила рольганга на расстоянии несколько меньшем.длины изогнутого рель;са. При 3toM сигналы преобразователей перемещения 14 и 15 базирующих щупов, прбпорциональные расстоянию от линии yctaновки щупов до концов изогнутого рельса, поступают на вход блока 16 определения соотношений, где формируется модуль разности сигналов, выделяется меньший из сигналов и формируется сигнал управления коммутатором 20. С выхода блока 16 Определейия соотношений первые два сигнала поступают на входы сумматоров-умножителей. 17-19, причем модуль разности сигналов преобразователей перемещения базирующих щупов в блоке ,17 умножается на коэффициент 4-, в блоке 18 - .на коэффиьфент -%,в блсже 22 - на коэффициент -, в общем случае а -f 1F2где К - общее число базирующих и контроль ных щупов. Меньший из сигналов преобра ователей перемещения базирующих niynoB множается на единицу и суммируется с роизведениями. Операции умножения на постоянный коффициент и суммирование соответствуют пределению расстояний от линии установи щупов до контрольных точек хорды, стяивающей концы изогнутого рельса. В зависимости от знака угла наклона хоры к линии установки щупов возможно два сновных соотношения сигналов преобразоателей 14, 15 И)4 и . В сответствии с этим на управляющем выходе лока определения соотнощений формируетя один из двух сигналов. Первый сигнал управляет коммутатором 20 так, что выходы сумматоров-умножителей 17-19 соединяются коммутатором 20 с соответствующими преобразователями 21-23 аналог-код. Второй сигнал управляет коммутатором 20 так, что выходы сумматоров-умножителей 17-Г9 соединяются коммутатором 20 с преобразователями 21-23 аналог-код в обратном порядке, т. е. выход блока 17 соединяется с входом блока 23 и т. д. После окончания цикла перемещения ба зирующих щупов блоком управления выдается команда на перемещение измерительных щупов. При этом сигналы, пропорцио-. нальные перемещению измерительных щупов, поступают на вторые входы реверсивных счетчиков 9-11, с выходов которых сиг-, налы, пропорциональные величинам прогибов в контрольных точках рельса, поступают на входы регистратора 12. Сравнительные испытания данного устройства с известным в условиях рельсопро-. катного цеха показали, что оперативность контроля удовлетворяет темпу производства рельсов, а точность возрастает в 2- 3 раза. Формула изобретения Устройство для контроля искривления рельса по длине, содержащее п измерительных щупов, два базирующих щупа, импульсные преобразователи перемещения измерительных щупов, п реверсивных счетчиков, первые входы которых соединены с выходами импульсных преобразователей перемещения измерительных щупов, регистратор, входы которого соединены с выходами реверсивных счетчиков,и преобразователь координат контролируемых точек, входы которого соединены с базирующими щупами, а выходы подключены ко вторым входам реверсивных счетчиков, отличающееся тем, что, с целью повыщения точности и оперативности контроля, преобразователь координат KOWтролируемых точек выполнен в виде двух преобразователей перемещения базирующих щупов, блока определения соотношений, входы которого соединены с выходами преобразователей перемещения базирующих щупов, п сумматоров-умножителей, входы которых соединены с сигнальными выходами блока определения соотношений, коммутатора, сигнальные входы которого соединены с выходами сумматоров-умножителей, а вход управления - с управляющим выходом блока определения соотношений, и п преобразователей аналог-код, входы которых соединены с выходами коммутатора, а выходы являются выходами преобразователя координат.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 428198, кл. G 05 В 19/18, 1974.
2.Авторское свидетельство СССР № 405015, кл. G 01 В 7/28. 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для КОНТРОЛЯ ИСКРИВЛПНИЯ РЕЛЬСА ПОДЛИНЕ | 1973 |
|
SU405015A1 |
| Устройство для определения координат траектории скважины | 1980 |
|
SU909145A1 |
| Устройство для отображения информации | 1972 |
|
SU458004A1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ КАСАНИЯ | 2005 |
|
RU2284467C1 |
| Устройство для графической регистрации характеристик объекта при вибрационных испытаниях | 1972 |
|
SU478199A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА УСИЛЕНИЯ АКТИВНЫХ ФАР | 1989 |
|
SU1841122A1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |
| Устройство для микрофильмированияиНфОРМАции | 1979 |
|
SU842780A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ РЕЛЬСОВОГО ПУТИ | 1994 |
|
RU2081232C1 |
| Устройство для определения параметров траектории скважины | 1981 |
|
SU987085A1 |
