Изобретение относится к измерительной технике и предназначено для использования в системах координатных измерений автоматизированного технологического оборудования для определения геометрических параметров заготовок и деталей на этапах их изготовления, например в станках с ЧПУ, координатных измерительных машинах.
В условиях автоматизированного производства при использовании станков с ЧПУ и гибких производственных систем затраты на геометрические измерения заготовок и деталей достаточно большие. Поэтому особое значение приобретают измерения, выполняемые непосредственно на обрабатывающем технологическом оборудовании и базирующиеся на высокоскоростных методах сканирования [Lostse W. High-speed Scanning and Koordinatenmebgeraten/ Microtehnic, 1993, № 4, рр.4-10]. Последний подход ориентирован на уплотнении времени точечных координатных измерений, выполняемых измерительными головками. Плотность временного растра характеризуется, например интервалом 10 мс при скорости ощупывания до 50 мм/с. Этому способствует особая конструкция первичного электромеханического преобразователя (измерительной головки), реализуя тот или иной физический эффект и наделяя известными достоинствами и недостатками [2].
По мнению автора, найти компромисс между быстродействием выполнения текущих координатных измерений, повышением надежности измерительного преобразования и стоимостью оборудования, вследствие упрощения его конструкции, видится в применении эффектов продольной магнитострикции при проектировании преобразователей касания (измерительных головок с измерительной цепью). В этом случае конструкция первичного электромеханического преобразователя (магнитострикционной измерительной головки) получается достаточно простой (аналогично электроконтактной измерительной головке), технологичной, имеет высокую чувствительность на соприкосновение с поверхностью детали, обладает простой схемой кодирования первичной информации на повышенных скоростях ощупывания (например, на рабочих скоростях подачи суппорта станка до 2400 мм/мин). Применение современных методов обработки первичной информации позволяет без снижения быстродействия снизить погрешности отдельных точечных координатных измерений.
В данной работе автор предлагает принцип построения магнитострикционного преобразователя касания и два варианта исполнения первичного электромеханического преобразователя - измерительной головки, который выгодно отличается от всех известных на сегодня аналогичных устройств [2].
Известен преобразователь касания, реализующий электроконтактный метод координатных измерений [1]. Он содержит корпус измерительной головки, три пары опорно-контактных электрических групп, измерительный щуп с наконечником, подвижное кольцо и опорную пружину, измерительную цепь по формированию командного сигнала касания.
Наличие электрических контактных групп ведет к снижению надежности преобразования из-за наличия коммутационных процессов в измерительной цепи, а применяемый метод не обеспечивает требуемого быстродействия выполнения координатных измерений, ограничивая использование данного устройства.
Другой известный преобразователь касания [2], выбранный в качестве прототипа, реализует метод, основанный на изменении добротности измерительной цепи преобразователя пропорционально диссипативной составляющей силы взаимодействия измерительного щупа и объекта. Устройство содержит концентратор ультразвуковых колебаний с пьезоэлектрическим элементом, закрепленный в корпусе измерительной головки на базирующем элементе и подпружиненный опорной пружиной, щуп с измерительным наконечником, жестко закрепленный на базирующем элементе, генератор электрических колебаний, подключенный к одному выводу пьезоэлектрического элемента и входу регистратора изменения амплитуды, его другой вход подключен к другому выводу пьезоэлектрического элемента, а выход соединен с формирователем командных сигналов.
Использование амплитудного метода регистрации момента касания и его реализация с использованием пьезоэлектрического эффекта усложняет конструкцию первичного электромеханического преобразователя и ведет к снижению надежности преобразования, не обеспечивает требуемого быстродействия координатных измерений и ограничивает использование в технологических системах.
Технический результат предлагаемого изобретения заключается в повышении надежности преобразования и упрощения конструкции первичного электромеханического преобразователя (измерительной головки).
Поставленная цель достигается тем, что в магнитострикционный преобразователь касания, содержащий корпус измерительной головки, где размещены подпружиненный изнутри через пружину базирующий элемент с защемленным щупом и наконечником, и регистрирующий блок, дополнительно введены усилитель-ограничитель, подключенный через одновибратор к сигнальным входам блока индикации и регистрирующего блока, один его выход соединен с управляющим входом усилителя-ограничителя, второй - с шиной контроля, а третьи - с шинами результата, его управляющий вход подключен к шине управления, сигнальный вход усилителя-ограничителя подсоединен к выводам элемента считывания, закрепленного вблизи базирующего элемента на щупе измерительной головки, выполненного их магнитострикционного материала.
Кроме того, щуп измерительной головки магнитострикционного преобразователя касания выполнен из металлического немагнитного материала, в котором рабочая поверхность под элементом считывания покрыта слоем магнитострикционного материала.
Устройство поясняется чертежами. На фиг.1, 2 показаны блок-схема магнитострикционного преобразователя касания и варианты выполнения магнитострикционной измерительной головки. На фиг.3 приведены временные диаграммы, поясняющие принцип работы устройства.
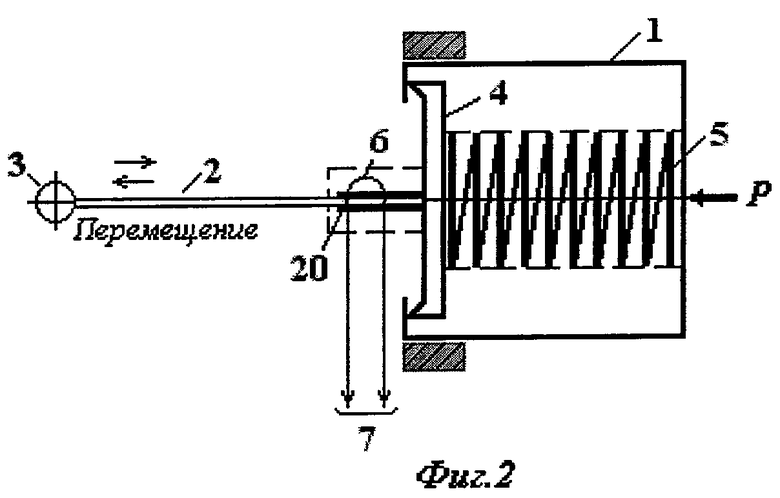
Магнитострикционный преобразователь касания (фиг.1) содержит корпус 1 магнитострикционной измерительной головки (МИГ), включающей щуп 2 из магнитострикционного материала с наконечником 3, жестко закрепленные на оси базирующего элемента 4, подпружиненного изнутри усилием Р прижимной пружиной 5, и элемент 6 считывания, а также усилитель-ограничитель 7, одновибратор 8, регистрирующий блок 9, блок 10 индикации, входную шину 11 управления и выходные шины 12 и 13 результата и контроля соответственно.
Элемент 6 считывания, неподвижно закрепленный на оси щупа 2 вблизи базирующего элемента 4, подсоединен к сигнальным входам усилителя-ограничителя 7. Его управляющий вход соединен с одним выходом регистрирующего блока 9, а выход через одновибратор 8 подключен к сигнальным входам блока 10 индикации и регистрирующего блока 9. Один его выход подключен к шине 13 контроля, а другие - к n - шинам 12 результата. Управляющий вход блока 9 подключен к шине 11 управления.
Отличительной особенностью магнитострикционного преобразователя касания по фиг.2 является исполнение МИГ с составным измерительным щупом 2. Его основание выполнено из металлического немагнитного материала (например, из нержавеющей стали), на который нанесен слой 20 высокочувствительного (с высоким коэффициентом λ магнитострикции) магнитострикционного материала. Протяженность этого слоя соизмерима с геометрическими размерами элемента 6 считывания, находящегося с ним в сопряжении.
Устройство работает следующим образом.
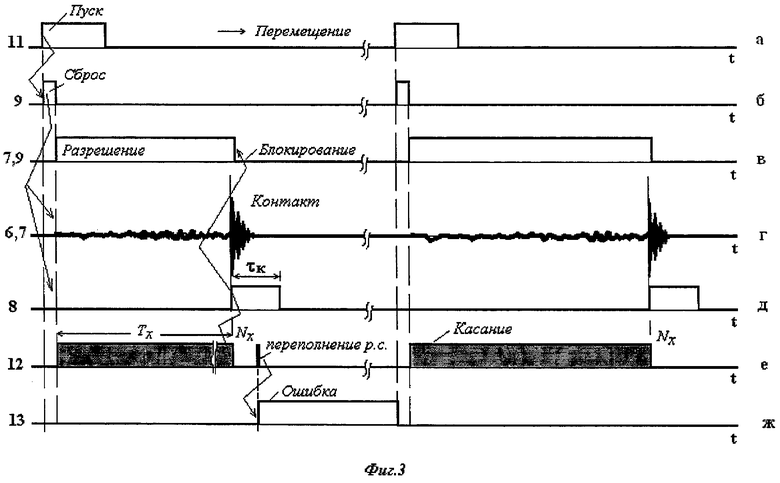
Первоначально магнитострикционный преобразователь касания (фиг.1) находится в заблокированном состоянии. Его перевод в рабочее состояние осуществляется по сигналу "Пуск" (фиг.3.а), подаваемому по шине 11 управления, в ответ на который регистрирующий блок 9 вырабатывает импульсный сигнал (фиг.3.б), подготавливая преобразователь к текущему циклу преобразования геометрического размера объекта. В результате на одном из его выходах формируется сигнал "Разрешение" (фиг.3.в), что вызывает разблокирование усилителя-ограничителя 7 и цифрового измерителя временных интервалов (ЦИВИ) регистрирующего блока 9 (на фиг.1 не показано).
Одновременно МИГ начинает перемещение в сторону контролируемого объекта со скоростью Vприв движения привода, расположенного на искомом расстоянии Lx от опорной координаты, определяемой на временной оси измерения геометрических размеров по моменту подачи сигнала "Пуск" (фиг.3.а.е). Это перемещение Lx будет продолжаться в течение времени Тx=Lx/Vприв до момента соприкосновения поверхностей объекта в контролируемой точке и наконечника 3 МИГ преобразователя. В течение этого времени ЦИВИ регистрирующего блока 9 осуществляется преобразование перемещения Lx щупа 2 МИГ в цифровой код Nх=Tх·f0 с заданной частотой f0 дискретизации.
В результате контакта наконечника 3 с поверхностью контролируемого объекта в среде щупа 2 МИГ, выполненного из магнитострикционного материала, образуется ударный механический импульс, который в следующий момент достигает элемента 6 считывания и им преобразуется в электрический импульс (эф. Виллари). Сигнал контакта (фиг.3.г) усиливается и преобразуется в прямоугольный видеоимпульс усилителем-ограничителем 7, производит запуск одновибратора 8, выполненного на логических элементах 14-17 с времязадающей RC-цепью на элементах 18 и 19.
На выходе одновибратора 8 вырабатывается синхронизирующий сигнал требуемой длительностью τк (фиг.3.д), которым блокируется работа ЦИВИ регистрирующего блока 9 по формированию результирующего кода Nx момента касания, несущего информацию о геометрическом параметре объекта в контролируемой точке его поверхности (фиг.3.в,е). На это время запускается блок 10 индикации, предназначенный для формирования дополнительной информации по звуковому и световому каналам о ходе выполнения координатных измерений.
В следующий момент на разрядных выходах регистрирующего блока 9 формируется результирующий код Nx, он проходит на n-разрядные шины 12 результата, выставляя сигнал "Касание". На другом его выходе вырабатывается блокирующий работу усилителя-ограничителя 7 сигнал (фиг.3.в), переводя магнитострикционный преобразователь касания в режим ожидания очередного цикла преобразования, выполнение которого не отличается от рассмотренного.
В случае нарушения работы МИГ преобразователя (фиг.1) возможна ситуация, когда возникает переполнение разрядной сетки (р.с.) ЦИВИ регистрирующего блока 9 и по шинам 12 будет сформирована недостоверная информация. Для контроля подобной ситуации в ходе координатных измерений в регистрирующем блоке 9 по сигналу переполнения разрядной сетки ЦИВИ (на фиг.1 не показано) вырабатывается импульсный сигнал "Ошибка", который выставляется по шине 13 контроля и информирует потребителя о недостоверности полученной информации в текущее цикле преобразования (фиг.3.е,ж). Это способствует повышению надежности преобразования устройства.
Применение в МИГ преобразователя (фиг.1) базирующего элемента 4, прижатого усилием Р к рабочей поверхности корпуса 1 посредством пружины 5, предотвращает поломку щупа 2 и наконечника 3 при соударениях о поверхность контролируемого объекта, способствует их пространственной и временной стабилизации в процессе выполнения координатных измерительных преобразований.
Кроме того, конструктивное исполнение МИГ устройства по фиг.1 может быть иное, как показано на фиг.2. Согласно этому варианту щуп 2 выполняется из металлического немагнитного материала, например из нержавеющей стали, но по месту крепления элемента 6 считывания наносится слой из магнитострикционного материала с высокими магнитострикционными параметрами. Это повышает коэффициент электромеханической связи электроакустического преобразователя и надежность магнитоупругого преобразования. Принцип работы магнитострикционного преобразователя касания при этом не изменяется, но уменьшается себестоимость его первичного электромеханического преобразователя (МИГ).
Таким образом, использование эффектов продольной магнитострикции при проектировании преобразователей касания позволяет повысить надежность преобразования за счет упрощения конструкции первичного электромеханического преобразователя, увеличения коэффициента электромеханической связи электроакустического элемента, снижения его стоимости и позволяет использовать алгоритмы быстрого сканирования в процессе координатных измерений. Эти преимущества заявляемого устройства отличают его от выбранного прототипа и позволяют обеспечить достижение положительного эффекта.
Источники информации
1. А.с. № 1599640 (СССР), G 01 B 5/02. БИ № 38, 1990.
2. В.-А.А.Гапшис и др. Координатные измерительные машины и их применение. М.: Машиностроение, 1988. - С.89, рис.2.19. - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ультразвуковой измерительный преобразователь скорости линейного перемещения | 1989 |
|
SU1747892A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2318186C2 |
| Ультразвуковой измеритель линейных перемещений | 1989 |
|
SU1645812A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1991 |
|
RU2031360C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1990 |
|
RU2039929C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2011294C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2039930C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2035692C1 |
| Измерительный преобразователь линейных перемещений | 1987 |
|
SU1504507A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2299401C2 |
Преобразователь предназначен для использования в автоматизированном технологическом оборудовании с системой координатных измерений геометрических параметров объектов. Преобразователь содержит корпус (1) магнитострикционной измерительной головки, включающей щуп (2) с наконечником (3), базирующий элемент (4), пружину (5), элемент считывания (6), а также усилитель-ограничитель (7), одновибратор (8), регистрирующий блок (9), блок индикации (10), входную и выходные шины (11) и (12), (13). В моменты контакта наконечника (3) измерительного щупа (2) с поверхностью контролируемого объекта возникают механические импульсы, преобразуемые в электрические сигналы требуемой формы, которые являются реперными точками отсчета геометрических параметров объекта относительно цифровой измерительной шкалы. Опорная координата задается моментом поступления стартового сигнала измерительного преобразования. Положительный эффект: повышение надежности преобразования, быстродействия и упрощение конструкции преобразователя. 1 з.п. ф-лы, 3 ил.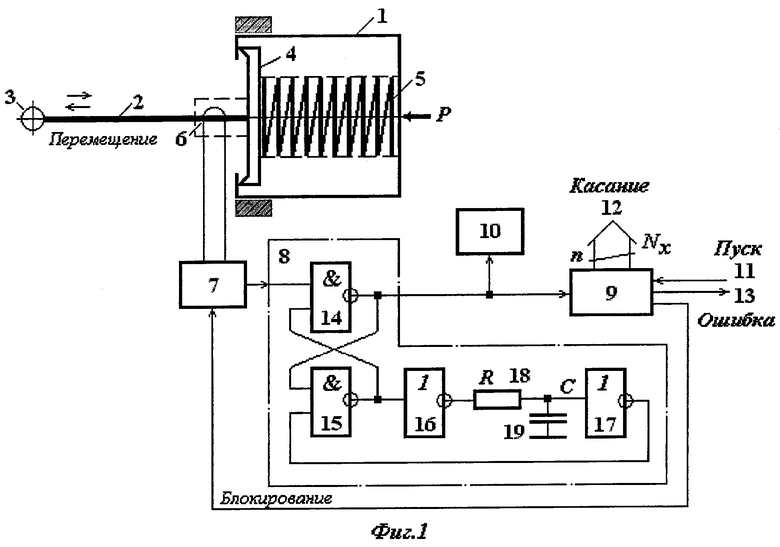
| ГАПШИС В.-А.А | |||
| и др | |||
| Координатные измерительные машины и их применение | |||
| - М.: Машиностроение, 1988, с | |||
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US 6516669 В2, 11.02.2003 | |||
| Трехкоординатная измерительная головка касания | 1988 |
|
SU1599640A1 |

