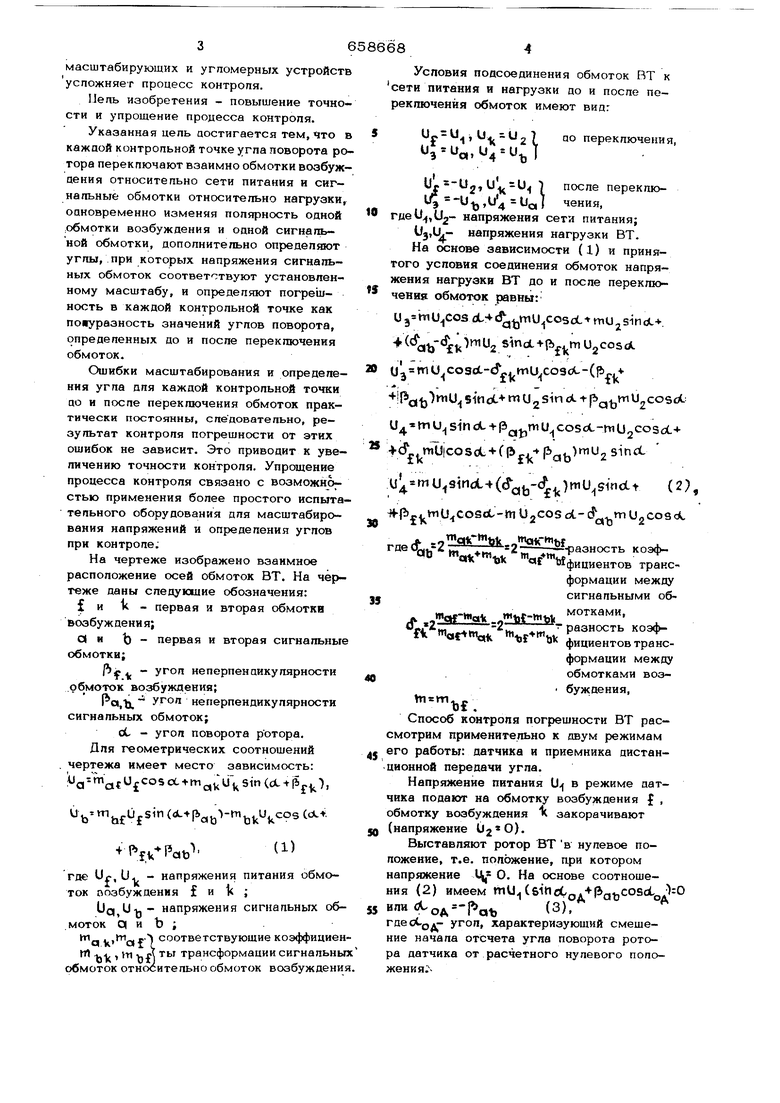
3 масштабирующих и угломерных устройств успожняет процесс контропя. Иепь изобретения - повышение точности и упрощение процесса контропя. Указанная цепь аостигается тем, что каждой контропьной точке угпа поворота ро тора переключают взаимно обмотки возбуж цения относительно сети питания и сигнапьные обмотки относительно нагрузки. одновременно изменяя полярность одной ,обмотки возбуждения и одной сигнагаь- ной обмотки, дополнительно определявот углы, при которых напряжения сигнальных обмоток соответствуют установленному масштабу, и определяют погрешность в каждой контрольной точке как поиуразность значений углов поворота, определенных до и после переключения обмоток. Ошибки масштабирования и опредетю- ния угла для каждой контрольной точки до и после переключения обмоток практически постоянны, следовательно, ре- зультат контроля погрешности от этих ошибок не зависит. Это приводит к увеличению точности контроля. Упрощение процесса контроля связано с возможно стью применения более простого испыта тельного оборудования для масштабирования напряжений и определения углов при контроле: На чертеже изображено взаимное расположение осей обмоток ВТ. На чертеже даны следующие обозначения: {и к - первая и вторая обмотки возбуждения; d и b - первая и вторая сигнальны обмотки; Р. - угол неперпендикулярности обмоток возбуждения; Ро,1х неперпендикулярности сигнальных обмоток; сС - угол поворота ротора. Для геометрических соотношений , чертежа имеет место зависимость: Va-- oitJ °soCfm u sin(,-), ь bf Pab t3k i ° где Ur,U. - напряжения питания обмоток возбуждения f и 1 ; Da и.- напряжения сигнальных об моток q и b ; щ П1 -Л соответствующие коэффицие frt . , ты трансформации сигнальн обмоток относительно обмоток возбужден 8 Условия подсоединения обмоток ВТ к сети питания и нагрузки до и после перекгаочення обмоток имеют вид: и U2 QO переключения, ,4 ujl после переклюu; -u.,,,i чения, гнеЦ,и2- напряжения сети питания; Uj.lb- напряжения нагрузки ВТ. На основе зависимости (1) и принятого условия соединения обмоток напряжения нагрузки ВТ до и после переключении обмоток равны: изЬ1ЦСоз oL- -c5 mU cosoL- mUjSindL-t-. 4( sinoL+fb m UgCosA u ти.созо(.. тцсозое-(р) ч. ,)п1и einoL I Ugsin л 1-pg mU cosoC U m u sin «A. ,jrvi u cosoL-m UjCosflC .. 4cfniUicosoL«(( j.- ,j)iU2 sincL U4.mu 9inc3l4(datj-c)wU sincCt (2), |b VtiU COSoL-tt1 UjCOS ot- , UgCosd. .з„с«.ь Ko ифициентов трансформации между сигнальными об ,motf-..aV ..fъГ-шьУ fi S fc «« «birr ° Ч фициентов трансформации между обмотками воз буждения. Способ контроля погрешности ВТ рассмотрим применительно к двум режимам его работы: датчика и приемника дистанционной передачи угла. Напряжение питания U в режиме датчика подают на обмотку возбуждения f , обмотку возбуждения л закорачивают (напряжение UjO). Выставляют ротор ВТ в нулевое положение, т.е. положение, при котором напряжение Ц, О. На основе соотношения (2) имеем mU (б1ПсСод+(5аг,со8оЦ,):0 ли Л-оА1 аЪ гдеоСдд- угол, характеризующий смещение начала отсчета угла поворота ротора датчика от расчетного нулевого положeнкяМасштабируют напряжения сигнальны обмоток цпя заданных контрольных точек (напряжения питания обмоток возбужпения остаются без изменения). Опе рация масштабирования означает измене ние значения напряжения U Btgfalpa3 (или напряжения Од. раз). Находят углы, при которых напряжения сигнальных обмоток соответствуют установленному масштабу. Математичес ки указанное соотношение имеет вид: . На основе соотношений (2), (3), (4) углы поворота ротора, датчика в каждой контрольной точке равны: tt ..л. .... Poito, . -psin2ol--5 coe2d РаЪ 27. Погрешность датчиковАЛ-,, имеет вид: sin 2 Х А- АКfiqb аъ coS2aL- - J По данному способу в каждой конт)oльнoй точке угла поворота ротора переключают взаимно обмотки возбуждения относите льно сети питания и сигнальные обмотки относительно нагрузки, одновременн изменяя по Л5фность одной обмотки возбуждения и одной сигнальной обмотки, дополнительно определяют углы, при которых установленному масштабу соответствуют напряжения сигнальных обмоток и определяют погрешность в каждой конт рольной точке как полуразность значений глов поворота, определенных до и после переключения рбмоток. Это значит, что напряжение питания (J подают на обмотку возбуждения 1 , обмотку возбуждения f закорачивают (напряжение U2-O). С учетом последовательности получения выражений (3), (4), (5), на основе соотношения (2) углы поворота ротора датчика в заданных контрольных точках после переключения обмоток равны: dl ,-c - sin2c.i cos2dlоСРезультат контроля погрешности датчика на основе соотношений (5) и (7) равен:, ai Sin2ct2 2 .6 Напряжение питания U в режиме приемника подают на обмотку возбуждения f , обмотку возбуждения 1 закорачивают. Выставляют ротор в нулев1 е положение, т.е. в положение, при котором . На основе соотношения (2) имеем: mU.CsinoCon -f atjCoscConVO UAH , гдесС р- угол, характеризующий смешение начала отсчета угла поворота ротора приемника от расчетного нулевого положения. Масштабируют напряжения питания обмоток возбуждения для заданных контрольных точек (напряжения сигнал}.ных обмоток не масштабируют). Операция масштабирования означает изменение значений нагтряжения питания обмоток возбуждения f и k соответственно по законам U UcosoL, 1/2 UsincjL Находят углы, при которых напряжения сигнальных обмоток соответствуют установленному масштабу. Математически указанное соответствие имеет вид: 04 О(1О) На основе соотношений (2), (10) с учетом заданного мастабирования напряжений питания углы поворота ротора приемника в контрольных точках равны: л cX-j oCp sin -| cos2ct.-М..(.11) Погрешность приемника имеет вид: Д п пк Sin2oO- х Pf1 Pfic - -f Cos;2aL-- С учетом последовательности полуения выражений (9), (10) на основе оотношения (2) .углы поворота ротора риемника в заданных контрольных очках после переключения обмоток авны: f-k 2oL--p-COS2ct + -eL PflcU3) Результат контроля погрешности на нове соотношений (11) и (13) ран:sin 2ot + -«- - cos2oL-Реаупьтат контроля погрешности не йависит от величины ошибок угломерного устройства и масштабного устройства, так как в каждой контрольной точке указанные ошибки равны по величине и входят Б результат определения угйов поворота ротора до и после переключения обмоток с одинаковыми знаками. Таким образом, обеспечивается повышение точности контроля погрешности. Упрсхцение процесса контроля достигается за счет того, что можно использовать .болей простре испытательное оборудование, не обпадающеа высокой точностью и не требующее высокой квалификации контролера. Формула изобретени Способ контроля погрешности вращак щёгося трансформатора, заключающийся в том, что на обмотки возбуждения подают напряжения питания, выставляют ротор в нулевое положение, масштабируют напряжения питания и напряжения сигнальных обмоток для заданных контропьных точек угла поворота ротора, поворачивая ротор,.определяют углы при которых напряжения сигнальньтх обмоток соответствуют установленному масштабу, отпичаюшийс я тем, что, с целью повышения точности и упрошеция процесса контроля, в каждой контрольной точке угла поворота ротора перекл1очают взаимно обмотки возбужж ния относительно сети питания и сигнальные обмотки относвтепьно нагрузки, одновременно изменяя полярность одной обмотки возбуждения и одной сигнальной обмотки, дополнительно определяют углы, при которых напряжения сигнальных обмоток роответствуют установленному масштабу, и определяют погрешность в каждой контрольной точке как полуразность значений угпов поворота ротора, определенных до и после переключения обмоток. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР НЬ 333398, кл. Q01 В 7/30, 1971. 2.ГОСТ 14ОО-68.