(54) УСТРОЙСТВО ДЛЯ ЗАДАНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентации объекта | 1982 |
|
SU1043613A1 |
| Юстировочное устройство | 1985 |
|
SU1318967A1 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2012 |
|
RU2504735C1 |
| Устройство для задания и регулируемого изменения наклона | 1980 |
|
SU922510A1 |
| Устройство для выставки преимущественно акселерометров | 1982 |
|
SU1064206A1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ТЕЛЕСКОПА | 2014 |
|
RU2572218C9 |
| Устройство для задания углового положения объекта | 1977 |
|
SU678285A1 |
| Устройство для задания углового положения объектов | 1975 |
|
SU556318A1 |
| Центробежный стенд для моделирования параметров движения | 1974 |
|
SU659953A1 |
| ГИРОСКОПИЧЕСКИЙ ИЗМЕРИТЕЛЬ | 2015 |
|
RU2610389C1 |
1
Изобретение относится к контрольноизмерительной технике и может быть использовано для задания положения объекта относительно местной или базовой вертикали.
Известно устройство для определения углов наклона объектов, содержащее корпус, лазер, одно зеркало которого подвешено на маятнике, светоприемник, вход которого подключен к системе измерения JQ разности перемещения маятника при наклонном и горизонтальном положении объекта, причем колебательная система маятника связана с блоком возбуждения колебаний, а система измерения разности 15 полупериодов колебаний маятника выполнена в врде реверсивного счетчика Щ.
Недостатком указанного устройства является сложность конструкции, отсут, ствие задатчика угла, сложность юстщ5ов-:20 ки и необходимость коррекции нуля, поскольку ошибка со временем накапливается. Кроме того, указанное устройство имеет ограниченный срок службы, определяемый ресурсом лазера, трудность метрологической аттестации, а также жесткие требования к окружаюшим условиям (температура, вибрация, давление и т.п.)
Наиболее близким по технической сущности к изобретению является устройство для задания углового положения объекта, содержащее маятник, подвешенный на опоре, платформу, демпфер-стабнлизатор, установленный на основании, измеритель, углового положения и перемещатель Г21.
Недостатком этого устройства является возможность задания угла строго в одной плоскости и погрешность, обусловленная существенными темперйтурными деформациями плеч маятника.
Цель изобретения - повышение точности задания пространственного положения объекта.
Поставленная цель достигается тем, что устройство содержит платформу для размещения испытуемого объекта, уста1новле1шую с помощью упоров на основа-
йин, поворотные механизмы а измерители у5 лового положения платформы, блок атравлемия, шад1 каторы направления перемещения, поворотные механизмы вьшолнекы в виде элшстрических двигателей с фиксирующимися роторами И эксцентриков и связаны кинематически с платформой в трех точках, причем блок управления электрически соединен с каждым из двигателей, с измерителями углового положения и шздикаторами направления перемещения; по крайней мере один из поворотных механизмов установлен на упоре с помощью упругих элементов; поворотные механизмы выполнень в виде пьезоэлектрических двигателей с фиксирующимися роторами; поворотные механизмь сочленены с платформой в трех точках, отстоящих друг от друга через утоп 120.
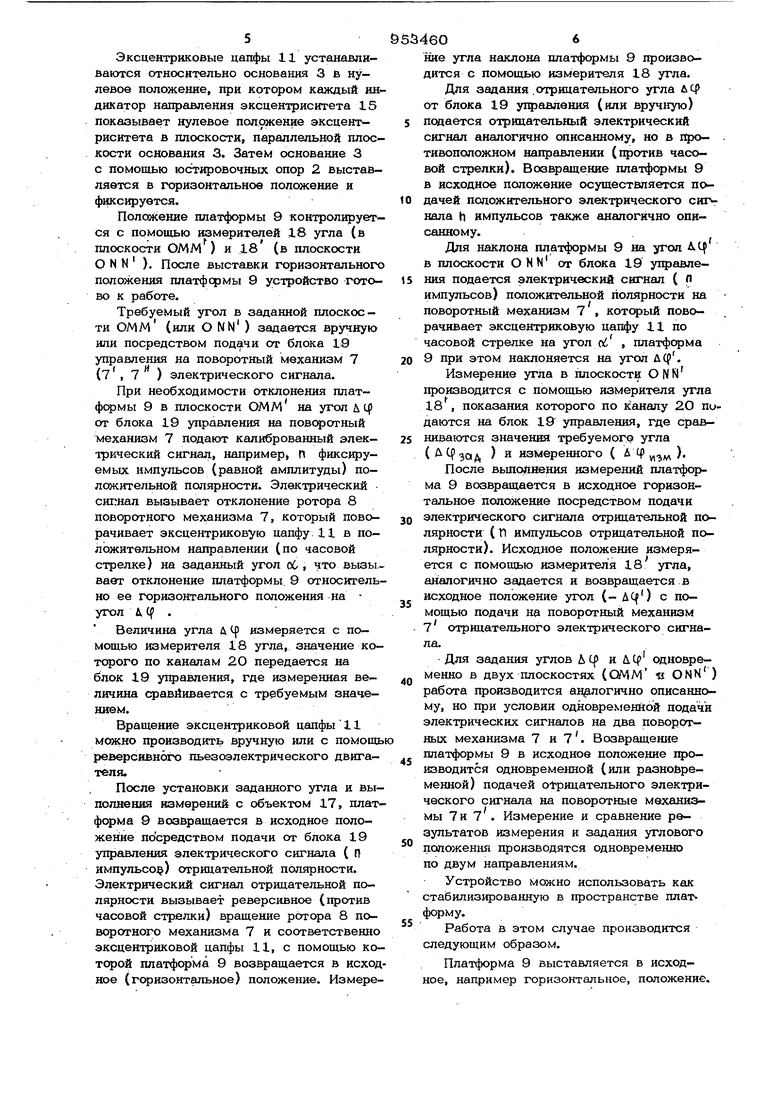
На фиг. 1 и фиг. 2 приведена конструктивная схема устройства; на фиг. 3 поворотный механизм, установленный на упоре с помощью упругих элементов, общий вид.
Устройство содержит фундамент 1, юстировочные опоры 2, основание 3, упоры 4, вертикальный паз 5, упругие элементы 6, поворотные механизмы 7, 7,7, фиксирующиеся роторы 8, платформа для размещения-испытуемого объекта 9, ползуны 10, эксцентриковые цапфы 11, хвостовики 12, щейки 13, сферические головки 14, индикаторы 15 направления эксцентриситета, сферически гнезда 16, 1б, 16, испытуемый объект 17, измерители угла 18, is, блок 19 управления, каналы 20 управления и измерения, термогерметичный Кожух 21, базовую ось ОО (.местная -вертикаль), продольную ось ММ , поперечную ось NN .
На фундаменте 1 с помощью юстироБочных опор 2 установлено основание 3, на котором укреплены упоры 4. На кажгдом упоре 4, имеющем вертикальный паз .5 (фиг. З), посредством шарщфов 6 установлен соответствующий поворотный механизм 7, 7 , и 7 с фиксирующимися роторами 8. Поворотные механизмы 7, 7 % 7 кинематически связаны с упорами 4 и платформой 9 с помощью ползунов 10 и эксцентриковых далф 11, включающих хвостовик 12, шейку 13 и сферическую головку 14. Хвостовики 12 скреплены с соответствующими фиксирующимися роторами 8 н снабжены ивдикаторами направления эксцешрисиteria 15. Шейки 13 подвижно сочленены с ползунами 10, которые вложены в вертикальные пазы 5 упоров 4. Сферические головки 13 уставлены в сферические гнезда 16, 16 и1б, которые сочленены с тфцами платформы 9, причем сферическое гнездо 16 - неподвижно, а сферические гнезда 16 и 1б - подвижны и подпружинены.
На платформе 9 располагается испытуемый объект 17 и измерители угла 18 н 18.
На основании 3 установлен блок 19 управления, который через каналы 20
5 управления и измерения электрически связан с поворотными механизмами 7, 7 и 7 , индикаторами 15 направления эксцентриситета и измерителями 18, 18 угла.,
0 Устройство закрывается термогерметичным кожухом 21 для уменьщения вли5ВДИЯ окружающей среды к стабилизации температуры.,
Работа устройства основана на пре5 образовании поворота эксцентриковой цапфы 11, кинематически связанной с платформой 9, в угловое отклонение плоскости последней. Кинематическое взаимодействие всех элементов преобразования при непрерывной подаче управляющего сигнала происходит в следующей взаимосвязи.
При подаче электрического сигнала. на поворотный механизм 7 его ротор 8 и неподвижно сочлененная с ним эксцентриковая цапфа 11 соверщают вращательное движение, при этом эксцентриковая цапфа 11 своей шейкой 13 за счет эксцентриситета е перемещает ползун 10 в вертикальном пазу 5 упора 4 и, опираясь на него, придает качательное движение поворотному .механизму . вокруг оси щаршфа 6, а ее сферическая головка 14, имеющая одну ось с щейкой 13, совершая вертикальное перемещение,
через сферическое гнездо 16 наклоняет платформу 9 вокруг оси, проходящей через сферические головки 14 эксцентриковых Папф 11, сочлененных с поворотнь1ми механизмами 7 и 7 «
С помощью поворота двух (из имеющихся трех) эксцентриковых цапф 11 обеспечивается независимое задание плат форме 9 углового отклонения по двум взаимно перпендикулярным направлениям.
Перед началом работы платформы 9 приводится в исходное положение, для чего вьшолняются следующие операции. Эксцентриковые цапфы 11 устанавливаются относительно основания 3 в нулевое положение, при котором каждый ин дикатор направления эксцентриситета 15 показывает нулевое полтекение эксцентриситета в плоскости, параллельной плос кости основания 3. Затем основание 3 с помощью юстировочных опор 2 выставляется в горизонтальное положение и фиксируется. Положение платформы 9 контрол1фует ся с помощью измерителей 18 угла (в плоскости ОММ ) и 18 (в плоскости О N N ), После выставки горизонтальног положения платффмы 9 устройство готово к работе. Требуемый угол в заданной плоскости ОММ (или О NN ) задается вручную или посредством подачи от блока 19 управления на поворотный механизм 7 (7, 7 ) электрического сигнала. При необходимости отклонения платформы 9 в плоскости ОММ на угол А Ц) от блока 19 управления на поворотный механизм 7 подакэт калиброванный электрический сигнал, например П фиксируемых импульсов (равной амплитуды) положительной полярности. Электрический сигнал вызывает отклонение ротора 8 поворотного механизма 7, который поворачивает эксцентриковую цапфу. 11 в положительном направлении (по часовой стрелке) на заданный угол об , что вызы вает отклонение платформы. 9 относитель но ее горизонтального положения на угол . Величина угла д Ср измеряется с помощью измерителя 18 угла, значение которого по каналам 2О передается на блок 19 управления, где измеренная величина сравйивается с требуемым значением. Вращение эксцентриковой цапфы 11 можно производить вручную или с помощ реверсивного пьезоэлектрического двигателя. После установки заданного угла и выполнения измерений с объектом 17, плат ферма 9 возвращается в исходное положение посредством подачи от блока 19 управления электрического сигнала ( П импульсо) отрицательной пол$фности. Электрический сигнал отрицательной полярности вызывает реверсивное (против часовой стрепкн) вращение ротора 8 поворотного механизма 7 и соответственно эксцентриковой цапфы 11, с помощью ко торой платформа 9 возвращается в исход ное (горизонтальное) положение. Измере ние угла наклона Ш1а;тформы 9 производится с помощью измерителя 18 угла. Для задания.отрицательного угла ЛСР от блока 19 у1дэавления (или вручную) подается отрицательный электрический сигнал аналогично описанному, но в гфо- тивоположном направлении (против часовой стрелки). Возвращение платформы 9 в исходное положение осуществляется подачей положительного электрического сиг нала h импульсов также аналогично описанному. Для наклона платформы 9 на угол i в плоскости О NN от блока 19 управления подается электрический сигнал ( П импульсов) положительной полярности на поворотный механизм 7 , который поворачивает эксцентриковую цапфу 11 по часовой стрелке на угол oi , платформа 9 при этом наклоняется на -угол. Д(р . Измерение угла в плоскости О N N производится с помощью измерителя угла 18 , показания которого по каналу 2О подаются на блок 19 управления, где сравниваются значения требуемого угла ( Чзад ) и измеренного ( Д Ф „зм ) После вьшойнения измерений платформа 9 возвращается в исходное горизонтальное положение посредством подачи электрического сигнала отрицательной полярности ( П импульсов отрицательной полярности). Исходное положение измеряется с помощью измерителя 18 угла, аналогично задается и возвращается в исходное положение угол (- ) с помощью подачи на поворотный механизм 7 отрицательного электрического сигнала. Для задания углов Л С|) и й. одновременно в двух плоскостях (ОММ ч ONN ) работа производится ан; логично описанному, но при условии одновременной подачи электрических сигналов на два поворотных механизма 7 и 7. Возвращение платформы 9 в исходное положение производится одновременной (или разноЬременной) подачей о рицательного электрического сигнала на поворотные механизмы 7и 7 . Измерение и сравнение результатов измерения и задания углового положен1ш производятся одновременно по двум направлениям. Устройство можно использовать как стабилизированную в пространстве платформу. Работа в этом случае производится следующим образом. Платформа 9 выставляется в исходное, например горизонтальное, положение. HaMepitrejiH 18 и 18 угла работают ка iiynb-opraHbi, т.е. при отклонении угла СП исходного псщоже1шя вьщают электрические сигналы рассогласования на блок 19 управления. Блок 19 управления, срав1швая измеренные и запрохрамМ1фованные сигналы, вьщает управляющ электрические сигналы, подаваемые на поворотные механизмы 7 и 7, котсрые совместно с эксцентриковыми цапфами 11 работают как исполнительные механизмы, поддерживая платформу 9 в заданном, например горизонтальном, положении. Величина максимально возможного отклонения платформы 9 от исходного положения сятределяется ее размерами и удвоенной величиной эксцентриситета цапф 11. Возможность получения максимальной разрешающей способности устройства, например для определения порога чувствительности перспективных угловых датчиков, достигается применением электрической редукции при пЬдаче элек трических сигналов, отличающихся межд собой по частоту на все три поворотных механизма 7,7 и 7 одновременно. Для получения сверхмалых углов наклона платформы 9 в плоскости ОММ следует подать одновременно электрические сигналы на поворотный механизм 7 с частотой, например 1ООО Гц, а на поворотные механизмы 7 и 7 одновременно с частотой 1001 Гц, или наоборот. При этом платформа 9 получит .вертикальное перемещение с одновремен ным отклонением эксцентриситета е, ра меров платформы 9 и коэффициента элек рической редукции. Устройство может быть использован для задания испытуемому объекту 17 динамического режима - угловой прокач ки по углу в одном или двух плоскостя (ОММ и ONN). Работа устройства происходит в это случае аналогично описанному, но изменение угла непрерывно с заданной угловой скоростью, определяемой программой, заложенной в блоке 19 управ ления. В описанной конструкции устройства шарниры 6, соединяющие поворотные ме ханизмы 7, 7, 7 с соответствующими упорами 4, могут быть вьшолнены в виде упругих элементов, как это пока но на фиг. 3. В качестве упругих элеме тов могут быть применены, например. 608 стержни из специального медного сплава, обладающего сверхупругими- свойствами. Применение упругих элементов упрощает конструкцию и снижает стоимость изпо- . товления устройства. Устройство по сравнению с известными обладает точностью задания углового положения испытуемого объекта за счет применения эксцентриковых цапф, обеспечивающих плавное перемещение, высокую точность, повторяемость и разрещающую способность преобразования поворота В угол отклонения платформы; обеспечивает возможность задания углового положения платформе по двум взаимно перпендикулярным плоскостям за счет использования эксцентриковых цапф с фиксирующими ротфами; обеспечивает сравнительно неболыдие Гс бариты и вес; снижает металлоемкость н стоимость изготовления за счет исключения кардановых подвесов и промежуточных поворотных рам; обеспечивает стабильную устойчивость в заданных положениях при динамических нагрузках за счет использования цапф с фиксирующимися роторами. Устройство для задания положения объекта в пространстве имеет следующие параметры: дискретность задания угла не менее 1 х 10 дуг. с; погрешность задаваемого угла не менее f-10 дуг. с. Кроме того, устррйство обладает возможностью одновременного задания углов в двух взаимно перпендикулярных плоскостях; возможностью метрологический аттестации; малой температурой погрещ-. ностью; отсутствием гистерезиса; возможностью дистационного управления; возможностью задания углов по программе; возможностью задания динаМичесческого режима; возможностью установки устройства в любом положении в пространстве; возможностью использования в качестве стабилизированной платформы пространственного положения. Формула изобретения 1. 1. Устройство для задания положения , объекта в пространстве, содержащее платформу для размещения испытуемого объекта, установленную с помощью упоров на основании, поворотные механизмы и измерители углового положения платформ мы, отличающееся тем, .что с ц.елью повышения точности задания пространственного положения объекта, в него введены блок управления, шадикаторы направления перемещения, поворотные
механизмы выполнены в виде электрически двигателей с фиксирующимися роторами и эксцентриков и связаны кинематически с платформой в тех точках, причем блок управления электрически соединен с каждым из двигателей, с измерителями угловога положения и индикаторами направления перемещения.
Источники информации, принятые во внимание при экспертизе
2}
иг.1
Ю
М
Фи. 3
