(54) ДАТЧИК УГЛА ПОВОРОТА ВАЛА
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угла поворота вала | 1979 |
|
SU808850A1 |
| Синусно-косинусный датчик угла | 1978 |
|
SU765945A1 |
| Устройство для измерения изгибающих сил и моментов, действующих на вращающий вал | 1976 |
|
SU655916A1 |
| ГИРОСКОП | 2010 |
|
RU2446382C1 |
| Устройство измерения крутящего момента вала | 2022 |
|
RU2795384C1 |
| БЕСКОЛЛЕКТОРНЫЙ СИНХРОННЫЙ ГЕНЕРАТОР С ПОСТОЯННЫМИ МАГНИТАМИ | 2014 |
|
RU2565775C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА (ВАРИАНТЫ) | 2005 |
|
RU2313884C2 |
| ОБРАЩЕННАЯ СИНХРОННАЯ РЕАКТИВНАЯ МАШИНА | 2024 |
|
RU2829489C1 |
| МОТОР-РЕДУКТОР С ИНТЕГРИРОВАННЫМ ПРЕЦЕССИРУЮЩИМ ЗУБЧАТЫМ КОЛЕСОМ (ВАРИАНТЫ) | 2013 |
|
RU2538478C1 |
| ГИРОСКОП (ВАРИАНТЫ) | 2011 |
|
RU2460040C1 |
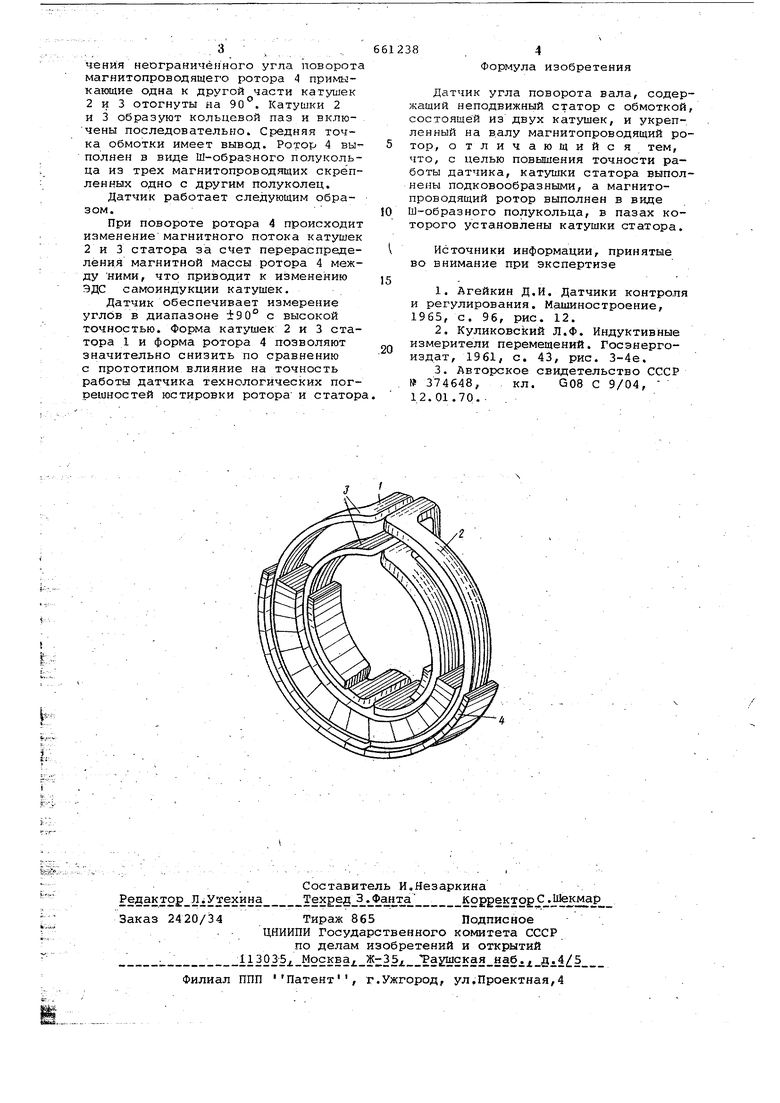
Изобретение относится к области автоматики и может быть использовано в преобразователях угла поворота вала в код. . , Известен индуктивный датчик угло вого положения, содержащий две катушки и поворотный якорь 1 . Этот датчик имеет сравнительно малый диапазон измеряемых углоь (±30°), а точность его работы недостаточна из-за нелинейности выходной характеристики. Известен также датчик угла прворота вала,, содержащий .ротор, выполненный в виде Магнитопроводящего серповидного сердечника, и обмотку, состоящую из двух катушек 2. Однако этот датчик имеет также сравнительно небольшой диапазон измерения { до±4 5) и значительную погрешность выходной характеристики, которая определяетеи точностью изготовления серповидного сердечника.. Наиболее близким техническим решением к изобретению является датчи угла поворота вала, содержащий статор с двухфазной обмоткой, состоящей из двух катушек с однофазной обмоткой, и укрепленный на валу рот выполненный из магнитных и немагнитных секторов. Витки двухфазной обмотки рамочного типа расположены вдоль образующей статора между витками кольцевой обмотки з J. Недостатком такого датчика является погрешность измерений, вызванная влиянием эксцентриситетов ротора и статора. Целью изобретения является повышение точности работы датчика. Поставленная цель достигается тем, что в датчике угла: поворота вала, содержащем неподвижный статор, с обмоткой, состоящей из двух катушек, и укрепленный на валу магнитопроводящий ротор, катушки статора выполнены подковообразными, а магнитопровОдящий ротор выполнен в виде Ш-образного полукольца, в пазах которого установлены катушки статора.. На чертеже приведена конструктивная схема датчика. Бесконтактный индуктивный датчик угла поворота вала содержит неподвижный статор 1 с обмоткой, состоящей из двух диаметрально расположенных катушек 2 и 3, имеющих подковообразную форму. Для обеспе3чения неограниченного угла поворота магнитопроводящего ротора 4 при ; кагощие одна к другой части катушек 2 и 3 отогнуты на 90°. Катушки 2 и 3 образуют кольцевой паз и включены последовательно. Средняя точка обмотки имеет вывод. Ротор 4 вы полнен в виде Ш-образного полукольца из трех магнитопроводящих скрепленных одно с другим полуколец. Датчик работает следующим образом. При повороте ротора 4 происходит изменениемагнитного потока катушек 2 и 3 статора за счет перераспределения магнитной массы ротора 4 между НИМИ, что приводит к изменению ЭДС самоиндукции катушек. Датчик обеспечивает измерение углов в диапазоне ±90° с высокой точностью. Форма катушек 2 и 3 статора 1 и форма ротора 4 позволяют значительно снизить по сравнению с прототипом влияние на точность работы датчика технологических погрешностей юстировки ротора и статор 8 Формула изобретения Датчик угла поворота вала, содержащий неподвижный статор с обмоткой, состоящей из двух катушек, и укрепленный на в.алу магнитопроводящий ротор, отличающийся тем, что, с целью повышения точности работы датчика, катушки статора выполнены подковообразными, а магнитопроводящий ротор выполнен в виде Ш-образного полукольца, в пазах которого установлены катушки статора. Источники информации, принятые во внимание при экспертизе 1.Агейкин Д.И. Датчики контроля и регулирования. Машиностроение, 1965, с. 96, рис. 12. 2.Куликовский Л.Ф. Индуктивные измерители перемещений. Госэнергоиздат, 1961, с. 43, рис. 3-4е. 3.Авторское свидетельство СССР № 374648, кл. G08 С 9/04, 12.01.70. . .
Г,::
