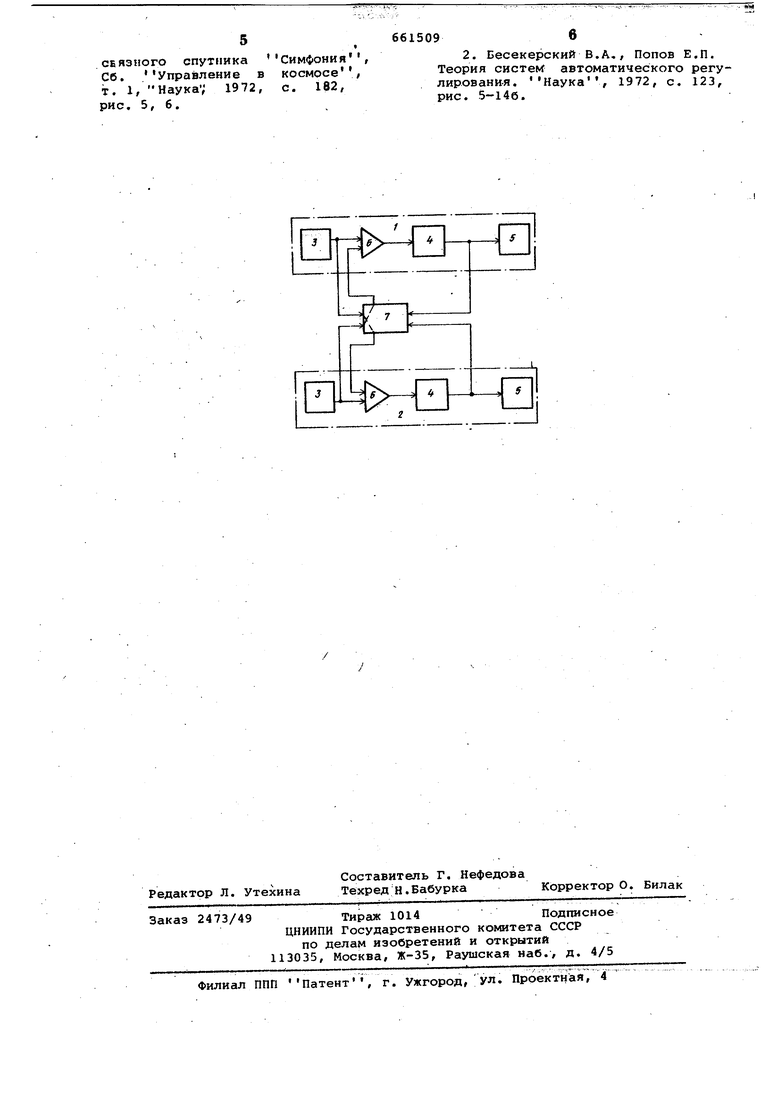
где U- - напряжение неразложенного сигнала, Гвляющегося функцией угла /5 (i- угол отклонения оптической оси прибора от местной вертикали; -Jf- угол, характеризующий ориентацию плоскости отклонения в связанной с ПМВ системе координат Оху FxiPv взаимовлияние каналов, ко торое может меняться в процессе эксплуатации прибора в широком диапа зоне, (за счет старения элементов, изменения температуры, изменения угла 3 и т.д.). Анализ динамики летательного аппарата с рассмотренным ПМВ показывает, что взаимовлияние каналов при 0 не приводит к существенным . изменениям в динамике летательного аппарата. При р в системе может возникнуть устойчивое коническое движение вокруг местной вертикали (автоколебания в каналах х и у, смещенные по фазе на угол It/2) . Причем при , ру 0 движение происходит против часовой стрелки, а при , по - часовой стрелке-.При этом требуемая точность не будет достигнута. Кроме того, для конических движений характерно повышенное энергопотребление вйледствие длитель ного и частого включения исполнитель нЫх органов. К аналогичному эффекту может привести также перекос испола&1&1ътаСо а 1 х Ш яШШГШё ци он НЫХ характеристик Лета ёЗтьного аппарата и другие факторы. Такое же явление может иметь место в системах автоматического регулирования . других областей. Целью изобретения является повышение точности компенсации взаимовлияния каналов. Зта цель достигается тем, что по предложенному способу фиксируют направление и последовательность включения исполнительных органов, в соответствии с которыми изменяют величину и знак входного сигнала смежного канала при суммировании. Йа чертёже представлена структурная системы, реализующей способ. Она содержит каналы 1 и 2(х и у). Каждый канал содержит чувствительный элемент 3, замеряющий регулируемую величину, блок управления 4 формирующий закон управления исполнительным органом 5, сумматор 6 и блок самонастройки 7, осуществляющий анализ порядка включения исполнитель ных, органов 5 и формирбвание коэффициентов суммирования сигналов. Система, в которой в качестве чув ствительного элемента, например, использован инфракрасный построитель местной fертикали, работает следующим образом. В блоке самонастроййи 7 аналиэиру ется по.ряаок исполнительных органов рпределяются знаки взаимовлияния аналов чувствительных элементов , J, . При наличии циклических последоательностей включения исполнительных рганов 5 на вхйды блоков управления поступают сигналы Т Uj,--U p,Ccosp - R.,sinp,,-)sin(sinJ)-R,cosp,,V cos-j- U,,U,(COSp,-R2SlHp)(sinp,,- tR2 osp 15in-j- , . C2) В зависимости от знака параметров р (, р,. присваиваются знаки коэффициентам R,, и Rj таким образом, чтобы члены , sinp, уменьшились по модулю. После этого повторно анализируется чередование включения исполнительных органов 5. При сохранении последовательности включений коэффициенты Н и R увеличиваются по модулю. Последовательность включения исполнительных органов 5 сох1раняётся до тех пор, пока один из членов (1) не обратится в нуль. Таким образом, наиболее опасная часть взаимовлияния каналов будет скомпенсирована, а круговые предельные циклы устранены. Вследствие ует занения предельных циклов TOWdCTb работы системы повышается, увеличивается ее быстродействие и снижаются затраты энергии Tia yhpaвлeниe. Модеййров ание на ЦВМ динамики системы управлейия, представленной на чёрётеже, йодтвердило ее способность автоматически компенсировать заранее неизвестное взаимовлияние каналов и устранять нежелательные предельные циклы, вследствие чего, точность повышалась и уменьшались затраты энергии на управление. Формула изобретения Способ компенсации взаимовлияния каналов сиОТем управления путем формирования сигнала управления канала суммированием его вводного сигнала с входным сигналом смежного канала, отличающийся тем, что,с целью повышения точности компенсации взаимовлияния, фиксируют направление и последовательность включения исполнительных органов, в соответствии с которыми изменяют величину и знак входного сигнала смежного канала при суммировании. Источники информации, принятые во внимание при экспертизе 1.«Браух А., Векессер К. Система управления орбитой и ориентацией
связного спутника Симфония, Сб. Управление в космосе , т. 1, Наука-; 1972, с. 182, рис. 5, 6.
2, Бесекерский В.А,, Попов Е.П. Теория систем автоматического регулирования. Наука, 1972, с. 123, рис. 5-146.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ БЕСПЛАТФОРМЕННОГО ОРБИТАЛЬНОГО ГИРОКОМПАСА | 2015 |
|
RU2597015C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ С ИСПОЛЬЗОВАНИЕМ ОРБИТАЛЬНОГО ГИРОКОМПАСА | 2012 |
|
RU2509690C1 |
| ГИРОКОМПАС ДЛЯ ОРБИТАЛЬНЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2015 |
|
RU2597018C2 |
| СПОСОБ ОРБИТАЛЬНОГО ГИРОКОМПАСИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2583350C1 |
| СПОСОБ КОРРЕКЦИИ И УСТРОЙСТВО ОРБИТАЛЬНОГО ГИРОКОМПАСА ДЛЯ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2579406C1 |
| Управляющее устройство | 1983 |
|
SU1161916A1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ БЕСПЛАТФОРМЕННОГО ОРБИТАЛЬНОГО ГИРОКОМПАСА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2579387C1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| Система стабилизации объекта с присоединенным упругим элементом | 1988 |
|
SU1525676A1 |
| Устройство для программного управления с коррекцией программы | 1986 |
|
SU1352457A1 |