Изобретение относится к автоматике и вычислительной технике, в частности к системам программного управления манипуляторами.
Целью изобретения является расширение функциональных возможностей путем управления по трем координатам при относительных перемещениях объекта управления и носителя исполнитель-ю канала А по координате Z, так как поного механизма.
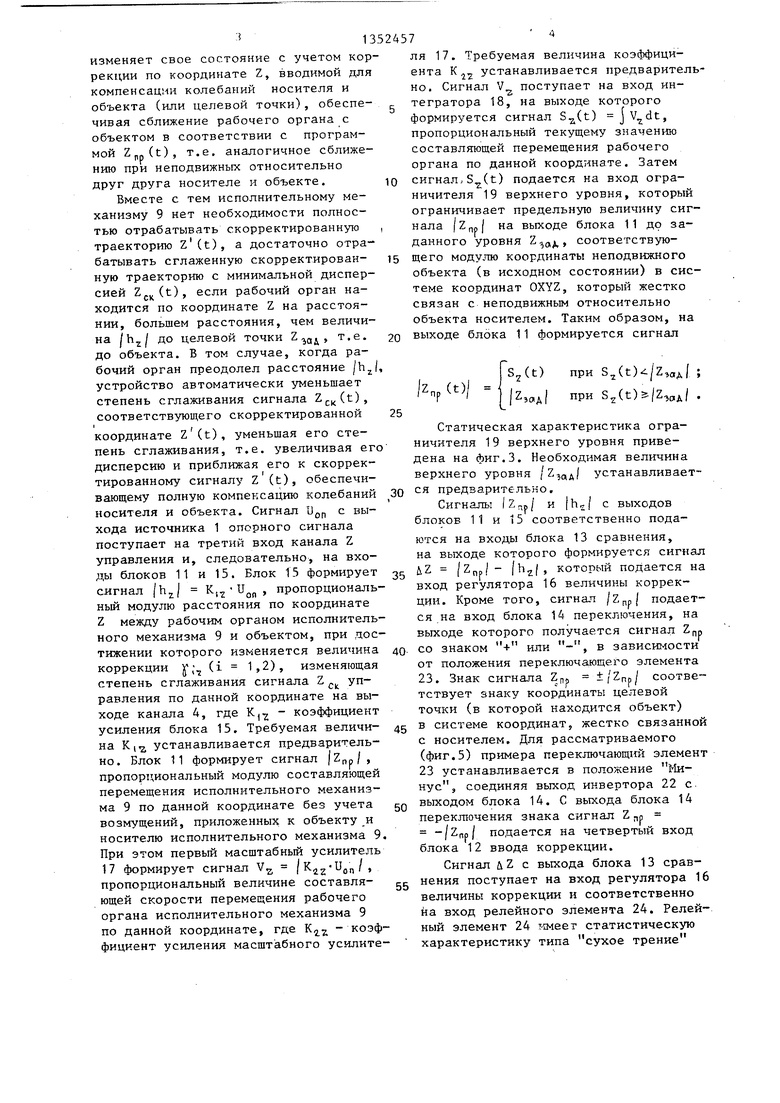
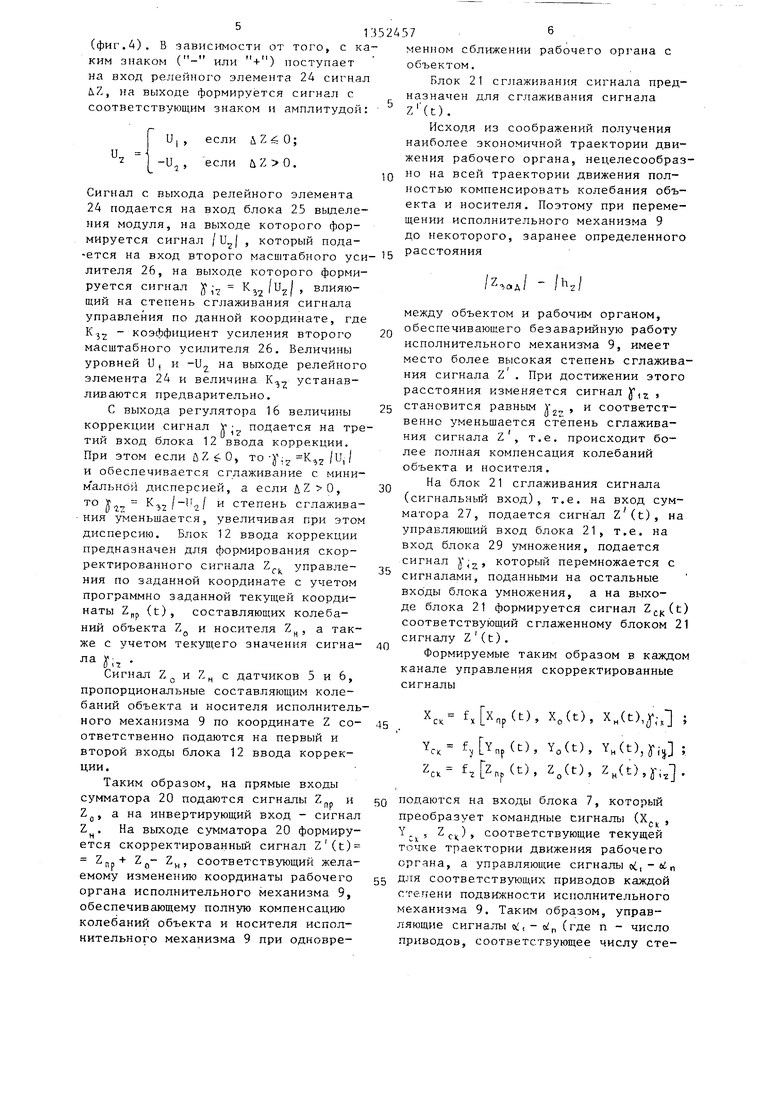
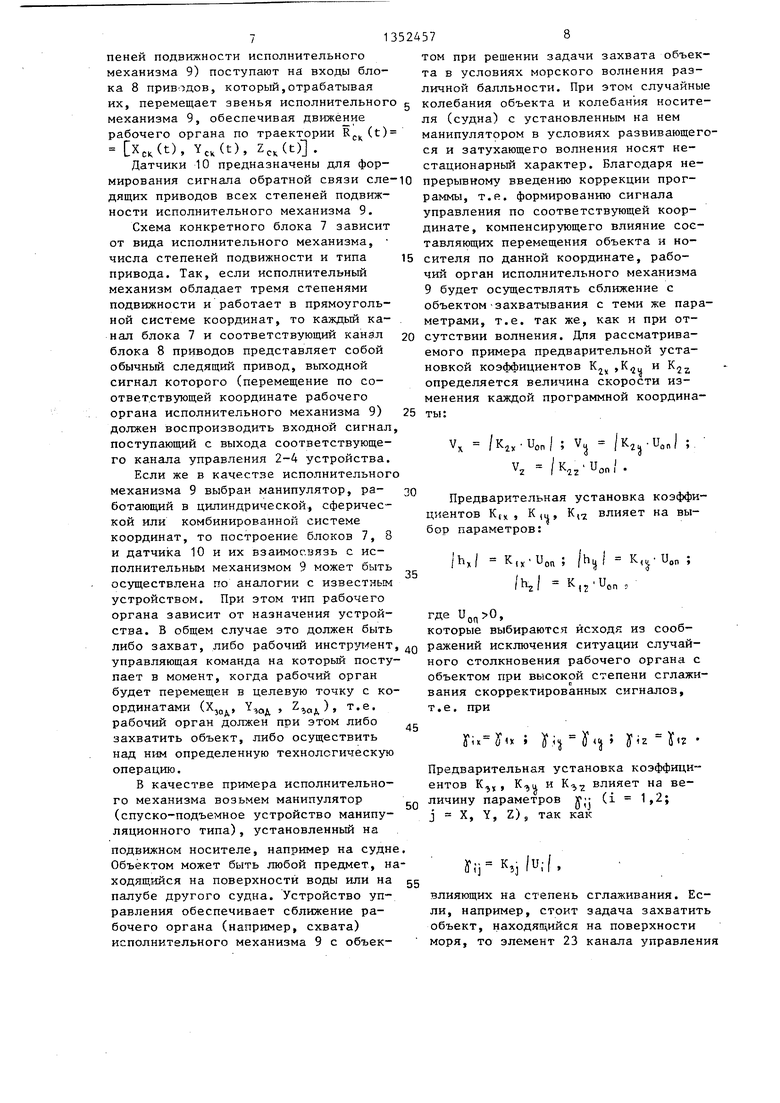
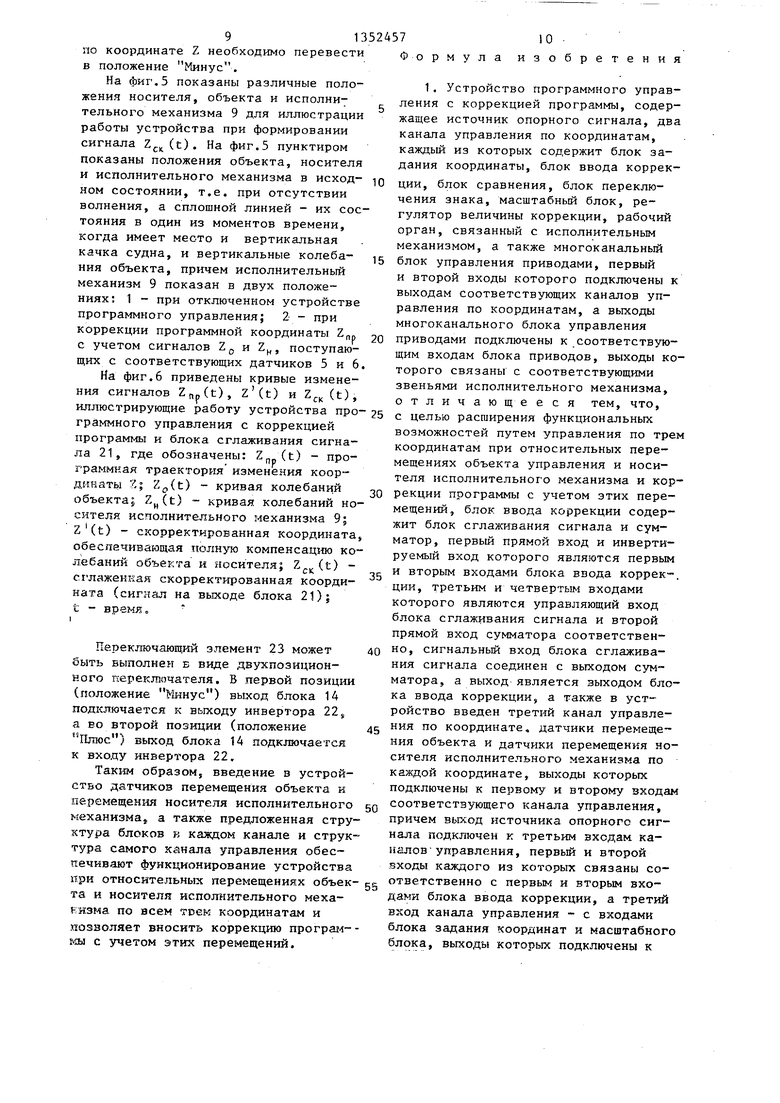
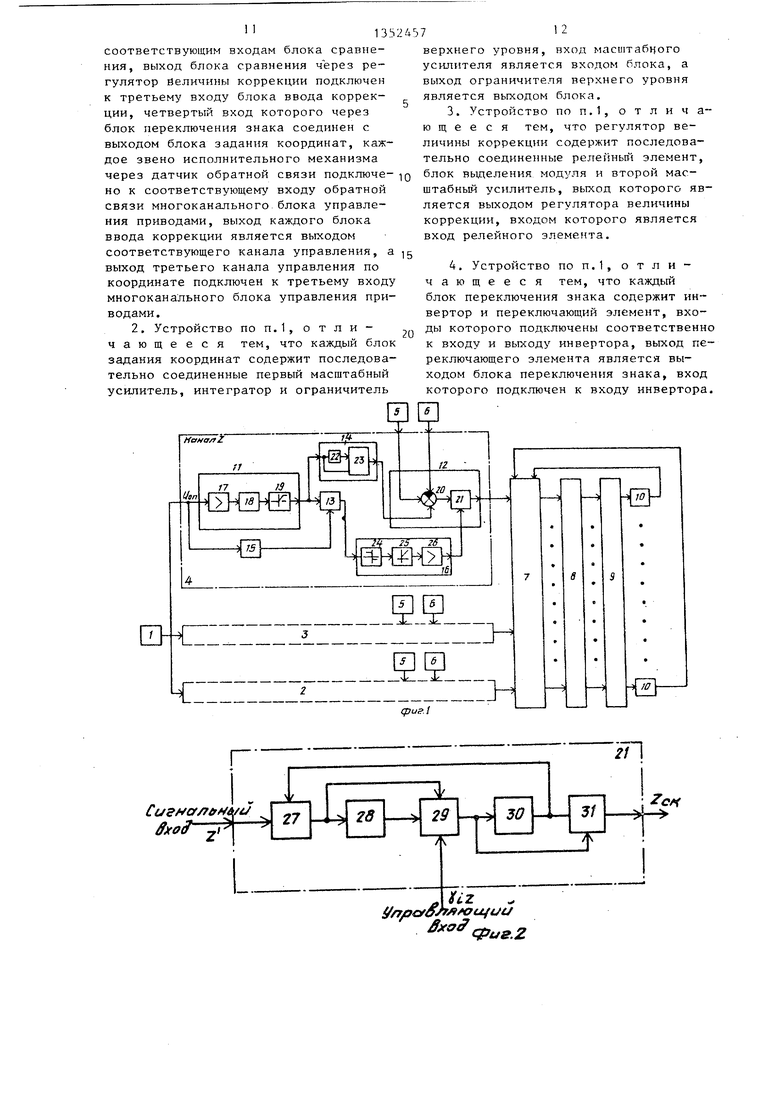
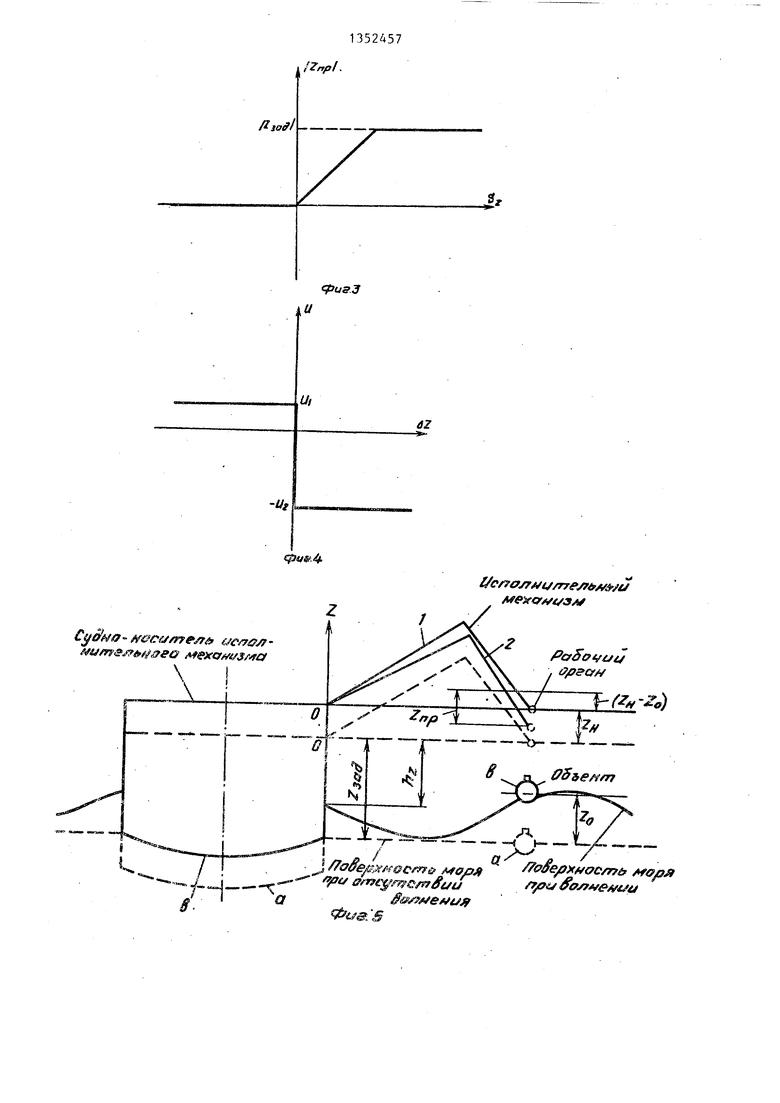
На фиг.1 изображена функциональная схема устройства программного управления с коррекцией программы; на фиг.2 - схема блока сглаживания сигнала; на фиг.З - статистическая характеристика ограничителя верхнего уровня; на фиг.4 - статистическая характеристика релейного элемента; на фиг.З - положение объекта и носителя исполнительного механизма (а - при отсутствии возмущений; 8 - при наличии возмущений); на фиг.6 - кривые изменения выходных сигналов различных блоков устройства при его работе.
Устройство программного управления с коррекцией программы содержит источник 1 опорного сигнала, три ка- н апа 2-4 управления по координатам, датчики 5 перемещения объекта и дат- чики 6 перемещения носителя исполнительного механизма по каждой координате, многоканальный блок 7 управления приводами, блок 8 приводов, исполнительный механизм 9 с рабочим органом, датчики 10 обратной связи. Каждый канал управления содержит блок 11 задания координат, блок 12 ввода коррекции, блок 13 сравнения, блок 14 переключения знака, масштабный блок 15 и регулятор 16 величины коррекции.
Блок 11 задания координат содержит первый масштабный усилитель 17, интегратор 18 и ограничитель 19 верхнего уровня.
Блок 12 ввода коррекции содержит сумматор 20 и блок 21 сглаживания сигнала. Блок 14 переключения знака содержит инвертор 22 и переключакнций элемент 23. Регулятор 16 величины коррекции содержит релейный элемент 24, блок 25 выделения модуля и второй масштабный усилитель 26. Блок 21 сглаживания сигнала содержит блок 27 вычитания, блок 28 вычитания абсолютной величины, блок 29 умножения, интегратор 30, сумматор 31.
15
строение всех каналов управления идентично.
Рабочий орган исполнительного механизма 9 должен отработать по координате Z заданный программной сигнал Zpp (t) и остановится в целевой точке (точке, в которой может находиться
объект)
20
25
30
40
45
55
координатами (X,a,
Z,aA в системе координат OXYZ, жестко связанной с носителем исполнительного механизма 9, т.е. для данного канала управления отработать сигнал 2,с(Д В тех случаях, когда объект и носитель исполнительного механизма 9 являются подвижными и совершают в общем случае случайные колебания по каждой из координат или по любой из них, например по Z, то перемещение рабочего органа по траектории Znp(t) не приводит к цели, т.е. отработанная рабочим органом координата Z ,,дд не соответствует координате целевой точки. Носитель, на котором установлен исполнительный механизм 9, и 35 объект, координаты которого должен обработать рабочий орган, как правило, совершают колебания под действием приложенных к ним возмущений. Таким образом, программная траектория
изменения координаты Z выбиракогда возмущения
отсутствуют, т.е. когда носитель и объект неподвижны относительно друг друга. Придействии возмущений, когда носитель и объект совершают случайные колебания повеем координатам, а для рассматриваемого канала 4 управления по координате Z, устройство осуществляет коррекцию программы движения
Znp(t)
ется для случая.
50
) в подвижной системе координат OXYZ, связанной с носителем, обеспечивая компенсацию возмущений, приложенных к носителю и объекту, а соответственно, и сближение рабочего органа с объектом в условиях возмущений по программе Z|,p(t), следовательно, и отработку координаты целевой точки Таким образом исполнительный механизм 9 непрерывно
Устройство программного управления с коррекцией программы работает следующим образом.
Управление исполнительным механизмом 9 с рабочим органом осуществляется по трем каналам 2-4 управления X, Y, Z (т.е. по трем координатам). Рассмотрим работу устройства на примере
строение всех каналов управления идентично.
Рабочий орган исполнительного механизма 9 должен отработать по координате Z заданный программной сигнал Zpp (t) и остановится в целевой точке (точке, в которой может находиться
объект)
0
5
0
0
5
координатами (X,a,
Z,aA в системе координат OXYZ, жестко связанной с носителем исполнительного механизма 9, т.е. для данного канала управления отработать сигнал 2,с(Д В тех случаях, когда объект и носитель исполнительного механизма 9 являются подвижными и совершают в общем случае случайные колебания по каждой из координат или по любой из них, например по Z, то перемещение рабочего органа по траектории Znp(t) не приводит к цели, т.е. отработанная рабочим органом координата Z ,,дд не соответствует координате целевой точки. Носитель, на котором установлен исполнительный механизм 9, и 5 объект, координаты которого должен обработать рабочий орган, как правило, совершают колебания под действием приложенных к ним возмущений. Таким образом, программная траектория
изменения координаты Z выбиракогда возмущения
отсутствуют, т.е. когда носитель и объект неподвижны относительно друг друга. Придействии возмущений, когда носитель и объект совершают случайные колебания повеем координатам, а для рассматриваемого канала 4 управления по координате Z, устройство осуществляет коррекцию программы движения
Znp(t)
ется для случая.
) в подвижной системе координат OXYZ, связанной с носителем, обеспечивая компенсацию возмущений, приложенных к носителю и объекту, а соответственно, и сближение рабочего органа с объектом в условиях возмущений по программе Z|,p(t), следовательно, и отработку координаты целевой точки Таким образом исполнительный механизм 9 непрерывно
изменяет свое состояние с учетом коррекции по координате Z, вводимой для компенсации колебаний носителя и объекта (или целевой точки), обеспе- чивая сближение рабочего органа с объектом в соответствии с программой Zpp(t), т.е. аналогичное сближению при неподвижных относительно друг друга носителе и объекте.
Вместе с тем исполнительному механизму 9 нет необходимости полностью отрабатывать скорректированную траекторию Z (t), а достаточно отрабатывать сглаженную скорректирован- ную траекторию с минимальной дисперсией Zg(t), если рабочий орган находится по координате Z на расстоянии, большем расстояния, чем величина до целевой точки Z дд , т.е. до объекта. В том случае, когда рабочий орган преодолел расстояние /h.,( устройство автоматически уменьшает степень сглаживания сигнала Z(.(t), соответствующего скорректированной
координате Z (t), уменьшая его степень сглаживания, т.е. увеличивая его дисперсию и приближая его к скорректированному сигналу Z (t), обеспечивающему полную компенсацию колебаний носителя и объекта. Сигнал 13, с выхода источника 1 опорного сигнала поступает на третий вход канала Z управления и, следовательно, на входы блоков 11 и 15. Блок 15 формирует сигнал |hj| К, Ug , пропорциональный модулю расстояния по координате Z между рабочим органом исполнительного механизма 9 и объектом, при достижении которого изменяется величина коррекции (i 1,2), изменяющая степень сглаживания сигнала Z управления по данной координате на выходе канала 4, где К, - коэффициент усиления блока 15. Требуемая величи- на К|, устанавливается предварительно. Блок 11 формирует сигнал |Znp/, пропорциональный модулю составляющей перемещения исполнительного механизма 9 по данной координате без учета возмущений, приложенных к объекту и носителю исполнительного механизма 9 При этом первый масштабный усилитель 17 формирует сигнал V t пропорциональный величине составля- ющей скорости перемещения рабочего органа исполнительного механизма 9 по данной координате, где К - коэффициент усиления масштабного усилителя 17. Требуемая величина коэффициента К устанавливается предварительно. Сигнал V поступает на вход ин
тегратора 18, на выходе которого формируется сигнал S(t) , пропорциональный текущему значению составляющей перемещения рабочего органа по данной координате. Затем сигнал,S(t) подается на вход ограничителя 19 верхнего уровня, который ограничивает предельную величину сигнала (Zripl на выходе блока 11 до заданного уровня , соответствующего модулю координаты неподвижного объекта (в исходном состоянии) в системе координат OXYZ, который жестко связан с неподвижным относительно объекта носителем. Таким образом, на выходе блока 11 формируется сигнал
|Znp(t)|
пр
) при S(t)i/Zэoд ;
Z,„д|при S2(t)&/Zадд/ .
Статическая характеристика ограничителя 19 верхнего уровня приведена на фиг.З. Необходимая величина верхнего уровня устанавливается предварительно.
Сигналы IZ,,p/ и с выходов блоков 11 и 15 соответственно подаются на входы блока 13 сравнения, на выходе которого формируется сигнал iZ (hjl, который подается на вход регулятора 16 величины коррекции. Кроме того, сигнал подается ,на вход блока 14 переключения, на выходе которого получается сигнал со знаком + или -, в зависиз-юсти от положения переключающего элемента 23. Знак сигнала Znp ±/Znp/ соответствует знаку координаты целевой точки (в которой находится объект) в системе координат, жестко связанной с носителем. Для рассматриваемого (фиг.5) примера переключающий элемент 23 устанавливается в положение Минус , соединяя выход инвертора 22 с, выходом блока 14. С выхода блока 14 переключения знака сигнал Z „о -/Znp/ подается на четвертый вход блока 12 ввода коррекции.
Сигнал U Z с выхода блока 13 сравнения поступает на вход регулятора 16 величины коррекции и соответственно на вход релейного элемента 24. Релейный элемент 24 т-шеет статистическую характеристику типа сухое трение
(фиг.4). В зависимости от того, с каким знаком (- или +) поступает на вход релейного элемента 24 сигнал uZ, на выходе формируется сигнал с соответствующим знаком и амплитудой:
и
I
если i Z 0;
П { -U,j , если uZ 0.
Сигнал с выхода релейного элемента 24 подается на вход блока 25 выделения модуля, на выходе которого формируется сигнал /и( , который пода- ется на вход второго масштабного уси- 15 лителя 26, на выходе которого формируется сигнал jy j К влияющий на степень сглаживания сигнала управления по данной координате, где Кз2 - коэффициент усиления второго 20 масштабного усилителя 26. Величины уровней и, и -и на выходе релейного элемента 24 и величина К устанавливаются предварительно.
С выхода регулятора 16 величины 5 коррекции сигнал V подается на третий вход блока 12 ввода коррекции. При этом если , то-J, и обеспечивается сглаживание с мини- м альной дисперсией, а если uZ 0, 30 то К.2 и степень сглажива- ния уменьшается, увеличивая при этом дисперсию. Блок 12 ввода коррекции предназначен для формирования скорректированного сигнала Z. управле- 35 ния по заданной координате с учетом программно заданной текущей координаты Zpp (t), составляющих колебаий объекта Z и носителя Z, а таке с учетом текуп1;его значения сигна- 40
а У;, .
Сигнал Zg и Z с датчиков 5 и 6, ропорциональные составляющим колеаний объекта и носителя исполнительного механизма 9 по координате Z со- 45 ответственно подаются на первый и торой входы блока 12 ввода коррекии.
Таким образом, на прямые входы сумматора 20 подаются сигналы Z. и 50 Z, а на инвертирующий вход - сигнал Z. На выходе сумматора 20 формируется скорректированный сигнал Z (t) Z.+ , соответствующий желаемому изменению координаты рабочего 55 органа исполнительного механизма 9, обеспечивающему полную компенсацию колебаний объекта и носителя исполнительного механизма 9 при одновре3524
:
10
- 15 20
5 30 35 40
45
50 55
576
менном сближении рабочего органа с объектом.
Блок 21 сглаживания сигнала предназначен для сглаживания сигнала Z (t).
Исходя из соображений получения наиболее экономичной траектории движения рабочего органа, нецелесообразно на всей траектории движения полностью компенсировать колебания объекта и носителя. Поэтому при перемещении исполнительного механизма 9 до некоторого, заранее определенного расстояния
/2,«д/ - /hj
между объектом и рабочим органом, обеспечивающего безаварийную работу исполнительного механиз ма 9, имеет место более высокая степень сглаживания сигнала Z . При достижении этого расстояния изменяется сигнал , становится равным , соответственно уменьшается степень сглаживания сигнала Z , т.е. происходит более полная компенсация колебаний объекта и носителя.
На блок 21 сглаживания сигнала (сигнальный вход), т.е. на вход сумматора 27, подается сигн ал Z (t), на управляющий вход блока 21, т.е. на вход блока 29 умножения, подается сигнал V;-75 который перемножается с
(/ Л
сигналами, поданными на остальные входы блока умножения, а на выходе блока 21 формируется сигнал Z|.j(t) соответствующий сглаженному блоком 21 сигналу Z (t).
Формируемые таким образом в каждом канале управления скорректированные сигналы
с (t), Xjt), X,(t),lf;, ;
YCK f.), Y,(t), Y,(t),yij ; 2c. ), Z/t), Z,(t),yi.
подаются на входы блока 7, который преобразует командные сигналы (, , У 5 2 СИ,) соответствующие текущей точке траектории движения рабочего органа, а управляющие сигналы , -/,„ для соответствующих приводов каждой стегуени подвижности исполнительного механизма 9. Таким образом, управляющие сигналы «;, - 0 (где п - число приводов, соответствующее числу степеней подвижности исполнительного механизма 9) поступают на входы блока 8 приводов, который,отрабатывая их, перемещает звенья исполнительного механизма 9, обеспечивая движение рабочего органа по траектории Rp(t)
X,,(t), Y,,(t), Z,,(t).
Датчики 10 предназначены для формирования сигнала обратной связи сле-ю прерывному введению коррекции прогдящих приводов всех степеней подвижности исполнительного механизма 9.
Схема конкретного блока 7 зависит от вида исполнительного механизма, числа степеней подвижности и типа привода. Так, если исполнительный механизм обладает тремя степенями подвижности и работает в прямоугольной системе координат, то каждый канал блока 7 и соответствующий канал блока 8 приводов представляет собой обычньм следящий привод, выходной сигнал которого (перемещение по соответствующей координате рабочего органа исполнительного механизма 9) должен воспроизводить входной сигнал поступающий с выхода соответствующего канала управления 2-4 устройства.
Если же в качестве исполнительног механизма 9 выбран манипулятор, работающий в цилиндрической, сферической или комбинированной системе координат, то построение блоков 7, 8 и датчика 10 и их взаимосвязь с исполнительным механизмом 9 может быть осуществлена по аналогии с известным устройством. При этом тип рабочего органа зависит от назначения устройства. В общем случае это должен быть либо захват, либо рабочий инстр п ент управляющая команда на который поступает в момент, когда рабочий орган будет перемещен в целевую точку с координатами (Х.|„, ,ад , 2,„), т.е. рабочий орган должен при этом либо захватить объект, либо осуществить над ним определенную технологическую операцию.
В качестве примера исполнительного механизма возьмем манипулятор (спуско-подъемное устройство манипу- ляционного типа), установленный на
подвижном носителе, например на судне Объектом может быть любой предмет, находящийся на поверхности воды или на палубе другого судна. Устройство управления обеспечивает сближение рабочего органа (например, схвата) исполнительного механизма 9 с объеко
13524578
том при решении задачи захвата объекта в условиях морского волнения различной балльности. При этом случайные колебания объекта и колебания носителя (судна) с установленным на нем манипулятором в условиях развивающегося и затухающего волнения носят нестационарный характер. Благодаря нераммы, т.е. формированию сигнала управления по соответствующей координате, компенсирующего влияние составляющих перемещения объекта и носителя по данной координате, рабочий орган исполнительного механизма 9 будет осуществлять сближение с объектом-захватывания с теми же параметрами, т.е. так же, как и при отсутствии волнения. Для рассматриваемого примера предварительной установкой коэффициентов К 1ч. 2г определяется величина скорости изменения каждой программной координаты:
.
- I Kj Uon
Чх
Vz
/К
S
и„
к,
22
Uoni
30
Предварительная установка коэффициентов К, , К,и, К, влияет на выбор параметров:
;ь.
К, Don ; |hi
K,,.UO
, hj К
17
где U-. 0,
которые выбираются исходя из сооб- ражений исключения ситуации случайного столкновения рабочего органа с объектом при высокой степени сглаживания скорректированных сигналов, т.е. при
45
У г Ifi Предварительная установка коэффициК
К,
и К.
влияет на веентов 1); ) личину параметров у;г (i 1,2; j X, Y, Z), так как
,j|u;,
влияющих на степень сглаживания. Если, например, стоит задача захватить объект, находящийся на поверхности моря, то элемент 23 канала управления
по координате Z необходимо перевести в положение Минус.
На фиг,5 показаны различные положения носителя, объекта и исполнительного механизма 9 для иллюстрации работы устройства при формировании сигнала Z. (t). На фиг.5 пунктиром показаны положения объекта, носителя и исполнительного механизма в исход- ном состоянии, т.е. при отсутствии волнения, а сплошной линией - их состояния в один из моментов времени, когда имеет место и вертикальная качка судна, и вертикальные колеба- ния объекта, причем исполнительный механизм 9 показан в двух положениях: 1 - при отключенном устройстве программного управления; 2 - при коррекции программной координаты Z. с учетом сигналов Z и Z, поступающих с соответствующих датчиков 5 и 6
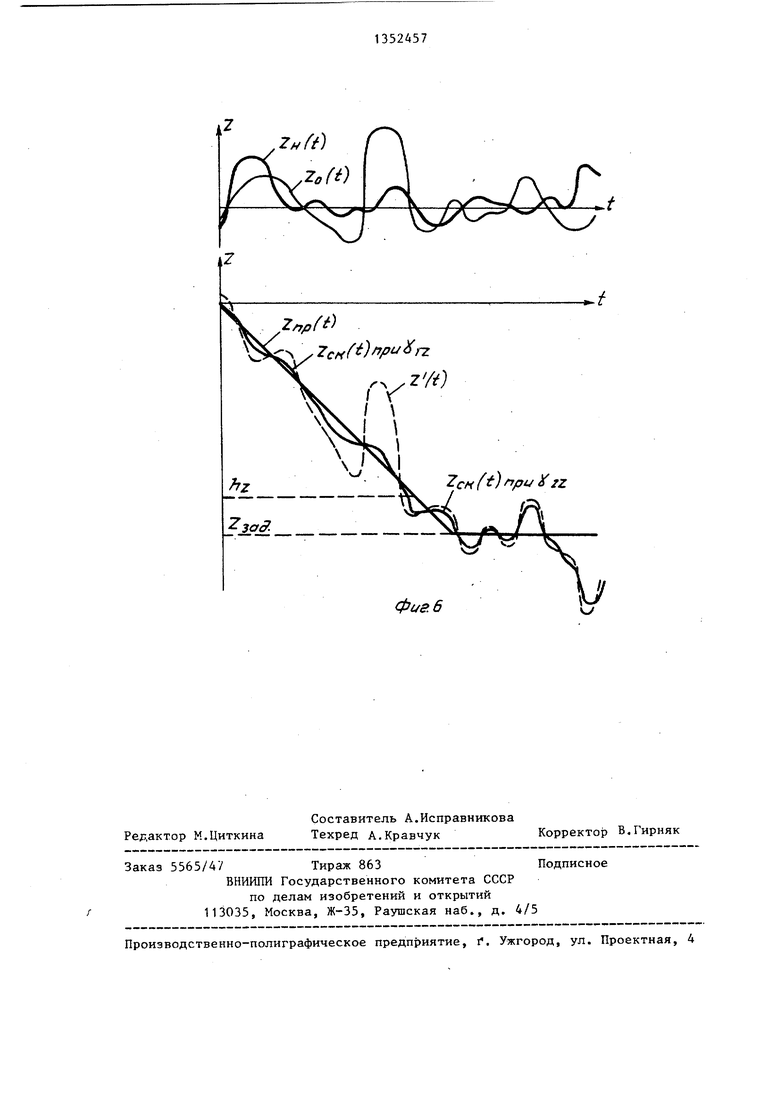
На фиг.6 приведены кривые изменения сигналов Zf,-(t), Z (t) и Z (t), иллюстрирующие работу устройства про- граммного управления с коррекцией программы и блока сглаживания сигнала 21, где обозначены: Z (t) - программная траектория изменения координаты Z; Zj,{t) - кривая колебаний объекта; Z(t) - кривая колебаний носителя исполнительного механизма 9; Z (t) - скорректированная координата обеспечивающая полную компенсацию ко лебаний объекта и носителя; Z(t) - сглаженная скорректированная координата (сигнал на выходе блока 21);
t - время. I
Переключающий элемент 23 может быть выполнен Б виде двухпозицион- ного перекл5очателя, В первой позиции (положение Минус) выход блока 14 подключается к выходу инвертора 22 а во второй позиции (положение Плюс) выход блока 14 подключается к входу инвертора 22,
Таким образом, введение в устройство датчиков перемещения объекта и перемещения носителя исполнительного jexaHH3Maj а также предложенная стру- гстура блоков к каждом канале и структура самого канала управления обеспечивают функционирование устройства при относительных перемещениях объек- та и носителя исполнительного меха- Еизма по всем трем координатам и позволяет вносить коррекцию nporpai-s- кы с учетом этих перемещений.
5 о
0 5
0 g
5
Ф о рмула изобретения
1. Устройство программного управления с коррекцией программы, содержащее источник опорного сигнала, два канала управления по координатам, каждый из которых содержит блок задания координаты, блок ввода коррекции, блок сравнения, блок переключения знака, масштабный блок, регулятор величины коррекции, рабочий орган, связанный с исполнительньм механизмом, а также многоканальный блок управления приводами, первый и второй входы которого подключены к выходам соответствующих каналов управления по координатам, а вьпсоды многоканального блока управления приводами подключены к соответствующим входам блока приводов, выходы которого связаны с соответствующими звеньями исполнительного механизма, отличающееся тем, что, с целью расширения функциональных возможностей путем управления по трем координатам при относительных перемещениях объекта управления и носителя исполнительного механизма и коррекции программы с учетом этих перемещений, блок ввода коррекции содержит блок сглаживания сигнала и сумматор, первый прямой вход и инвертируемый вход которого являются первым и вторым входами блока ввода коррек-. ции, третьим и четвертым входами которого являются управляющий вход блока сглаживания сигнала и второй прямой вх-од сумматора соответственно, сигнальный вход блока сглаживания сигнала соединен с выходом сз матора, а выход является выходом блока ввода коррекции, а также в устройство введен третий канал управления по координате, датчики перемещения объекта и датчики перемещения носителя исполнительного механизма по каждой координате, выходы которьк подключены к первому и второму входам соответствующего канала управления, причем выход источника опорного сигнала подключен к третьим входам, каналов управления, первьй и второй входы каждого из которых связаны соответственно с первым и вторым входами блока ввода коррекции, а третий вход канала управления - с входами блока задания координат и масштабного блока, выходы которых подключены к
соответствующим входам блока сравнения, выход блока сравнения через регулятор Величины коррекции подключен к третьему входу блока ввода коррекции, четвертый вход которого через блок переключения знака соединен с выходом блока задания координат, каждое звено исполнительного механизма
через датчик обратной связи подключе- IQ блок выделения модуля и второй масно к соответствующему входу обратной связи многоканального блока управления приводами, выход каждого блока ввода коррекции является выходом соответствующего канала управления, а выход третьего канала управления по координате подключен к третьему входу многоканального блока управления приводами.
2. Устройство по п.1, отличающееся тем, что каждый блок задания координат содержит последовательно соединенные первый масштабный усилитель, интегратор и ограничитель
Г
верхнего уровня, вход масштабного усилителя является входом блока, а выход ограничителя верхнего уровня является выходом блока.
3. Устройство по п,1, отличающееся тем, что регулятор величины коррекции содержит последовательно соединенные релейньш элемент.
штабный усилитель, выход которого является выходом регулятора величины коррекции, входом которого является вход релейного элемента.
4. Устройство по п.1, отличающееся тем, что каждьш блок переключения знака содержит инвертор и переключающий элемент, входы которого подключены соответственно к входу и выходу инвертора, выход переключающего элемента является выходом блока переключения знака, вход которого подключен к входу инвертора.
Ciifff ff-/f&cfj/ne fft m&j e f/ffeGi exof/t/Sf a
/7о е/гмм&ст& ff/3
--
a
fyJt/ ffffy f/r/C/ff fJ
ifjfy e fifjf
/7Д/7Л /77Л/7д Л9 Л/
PaSof/fjt/
Jf ±rz7 A
,)
ffSue/ m
ii
/7о е/гмм&ст& ff/3J9 o/e/j f oc/yyff
Jt/ ffffy f/r/C/ff fJ
fr/f
2npf
.)
Zcnf P 2Z
Cf
Фиг 6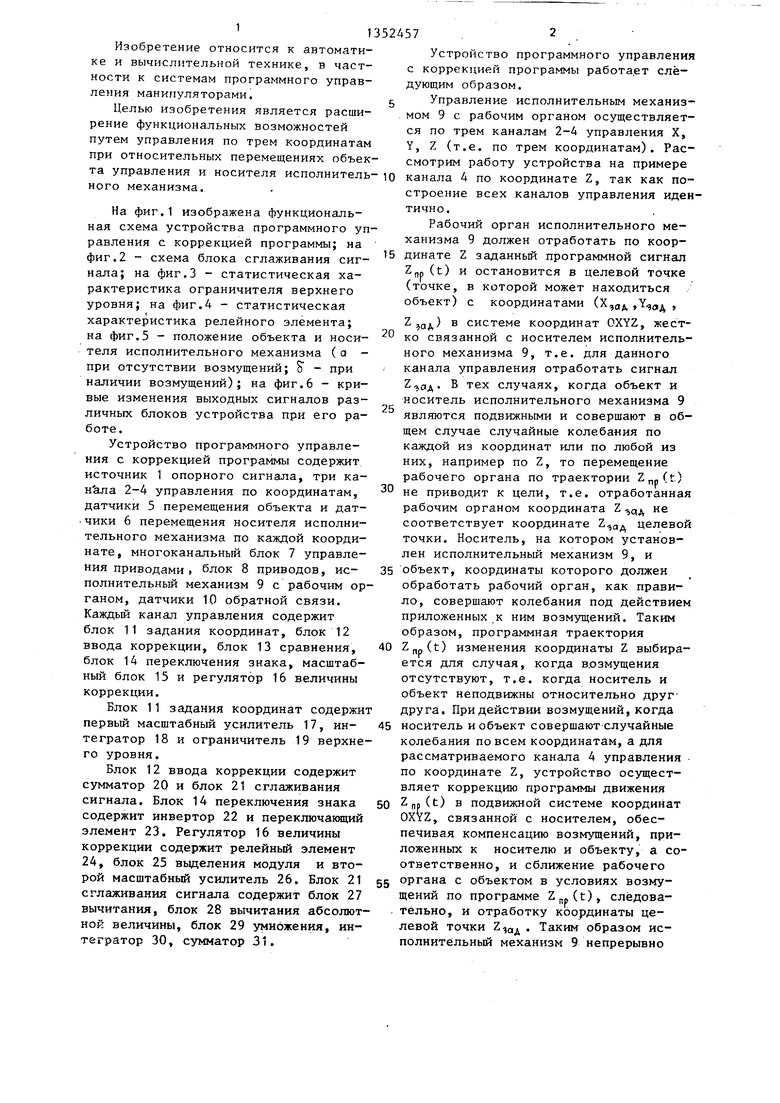
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ программного управления приводом | 1986 |
|
SU1403330A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКАСКАДНЫМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 1991 |
|
RU2012032C1 |
| Система программного управления угледобывающим комбайном | 1988 |
|
SU1610002A2 |
| Система для программного управления | 1984 |
|
SU1246053A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| СЛЕДЯЩАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ С КОМПЕНСАЦИЕЙ НЕИЗМЕРЯЕМЫХ ВОЗМУЩЕНИЙ | 1991 |
|
RU2051401C1 |
| Система для программного управления | 1989 |
|
SU1675847A1 |
| Устройство для управления электроприводом | 1982 |
|
SU1061105A1 |
| Система управления | 1983 |
|
SU1120283A1 |
Изобретение относится к автоматике и вычислительной технике, в частности к системам программного управления манипуляторами. Целью изобретения является расширение функциональных возможностей путем управления по трем координатам при относительных перемещениях объекта управления и носителя исполнительного механизма и коррекции программы с учетом этих перемещений. Устройство содержит источник опорного сигнала, три канала управления по каждой координате, датчики перемещения объекта и датчики перемещения носителя по каждой координате, многоканальный блок управления приводами, блок приводов, исполнительный механизм с рабочим органом и датчики обратной связи. Каждый канал управления содержит блок задания координат, масштабный блок, блок сравнения, блок переключения знака, регулятор величины коррекции, блок ввода коррекции, причем блок ввода коррекции содержит последовательно соеди1ненные сумматор и блок сглаживания сигнала. 3 з.п., 6 ил. с 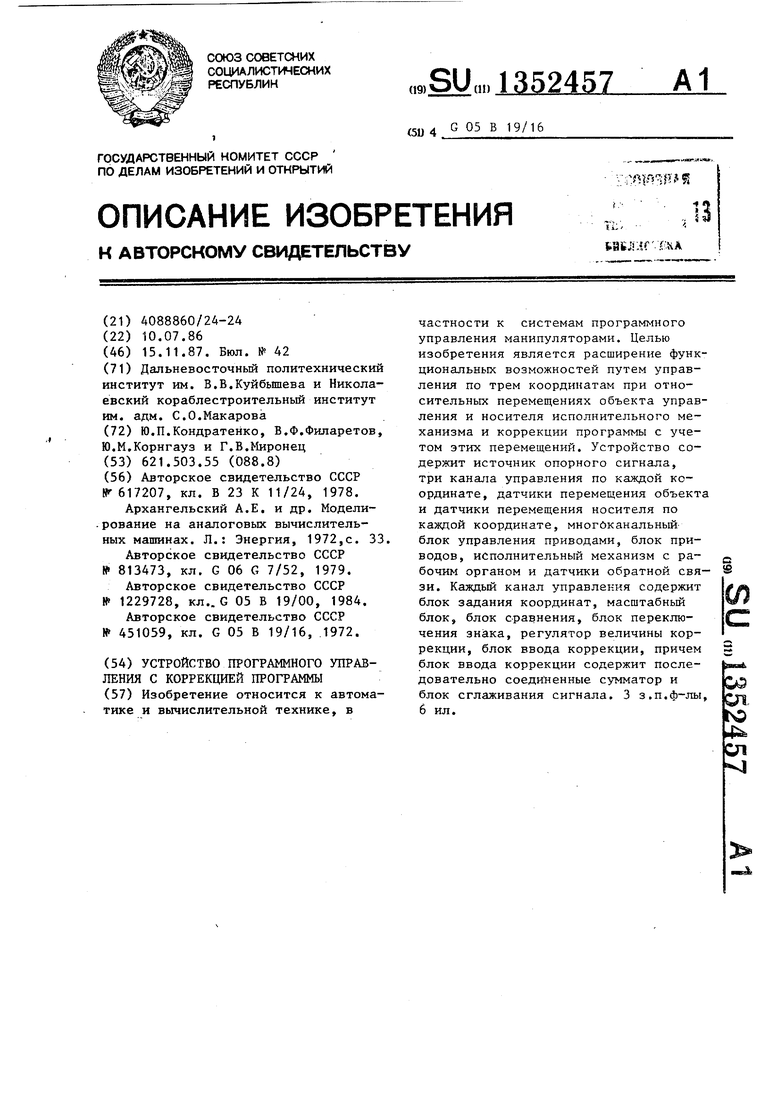
Редактор М.Циткина
Составитель А.Исправникова
Техред А.КравчукКорректор В.Гирняк
Заказ 5565/47 Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, Г. Ужгород, ул. Проектная, 4
| Устройство для программного управления промышленным роботом для контактной точечной сварки | 1977 |
|
SU617207A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Архангельский А.Е | |||
| и др | |||
| Моделирование на аналоговых вычислительных машинах | |||
| Л.: Энергия, 1972,с | |||
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
| Устройство для определения сред-НЕгО зНАчЕНия НЕСТАциОНАРНОгОСлучАйНОгО пРОцЕССА | 1979 |
|
SU813473A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для управления манипулятором | 1984 |
|
SU1229728A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Система двухкоординатного программного управления с коррекцией программы | 1972 |
|
SU451059A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
