11
Изобретение относится к автоматическому управлению и может быть использовано в системах управления технологическими процессами, в многокоординатных системах наведения оптических приборов, в системах управления подвижными объектами, при управлении высокоточными многодвигательными приводами.
Наиболее близким техническим решением к изобретению является устройство, содержащее в каждом канале управления последовательно соединенные блок управления и исполнительный орган, первое и второе корректирующие звенья, сумматор и датчик регулируемой координаты, подключенный входом к вьгходу исполнительного органа, а выходом - к первому входу сумматор соединенного выходом с входами перво-, го и второго корректирующих звеньев с первым входом блока управления, прсоединенного вторым входом к выходу второго корректирующего звена первого смежного канала, а третьим входом к выходу первого корректирующего зве на второго смежного канала l .
Однако параметры корректирующих звеньев устройства определены исходя из конкретного режима работы системы. При его изменении, например при вариациях нагрузки, система начинает работать несинхронно, так как условия компенсации нарушаются. Снижение точности компенсации ведет к снижению точности стабилизации напряжения и распределения реактивных oщнocтeй генераторов.
Целью изобретения является повышение точности компенсации взаимосвязей каналов управления многосвязной системы.
Поставленная цель достигается тем, что устройство, содержащее в каждом канале управления последовательно соединенные блок управления и исполнительный орган, первое и второе корректирующие звенья, сумматор и датчик регулируемой координаты, подключенный входом к выходу исполнительного органа, а выходом - к первому входу сумматора, ко второму входу сумматора подключено задающее воздействие, выход сумматора соединен с входами первого и второго корректирующих звеньев и с первым входом блока управления, который присоединен вторым входом к выходу второг
корректирующего звена первого смежного канала, а третьим входом - к выходу первого корректирующего звена второго смежного канала, содержит в каждом канале полосовой фильтр и последовательно соединенные фазовый дискриминатор, регулятор самонастройки и широтно-имиульсный модулятор, выход которого подключен к управляющим входам первого корректирующего звена данного канала и второго корректирующего звена первого смежного канала управления, вход полосового фильтра соединен с выходом датчика регулируемой координаты, а выход - с первым входом фазового дискриминатора, к второму входу фазового дискриминатора подключен выход полосового фильтра первого смежного канала.
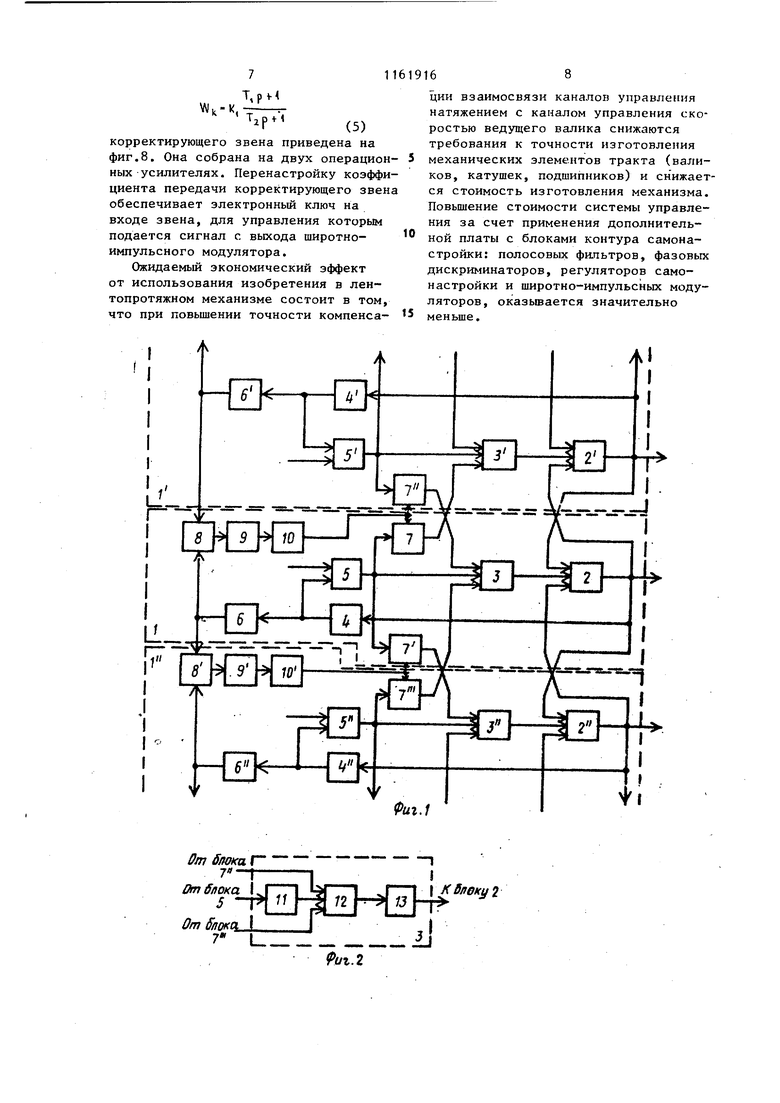
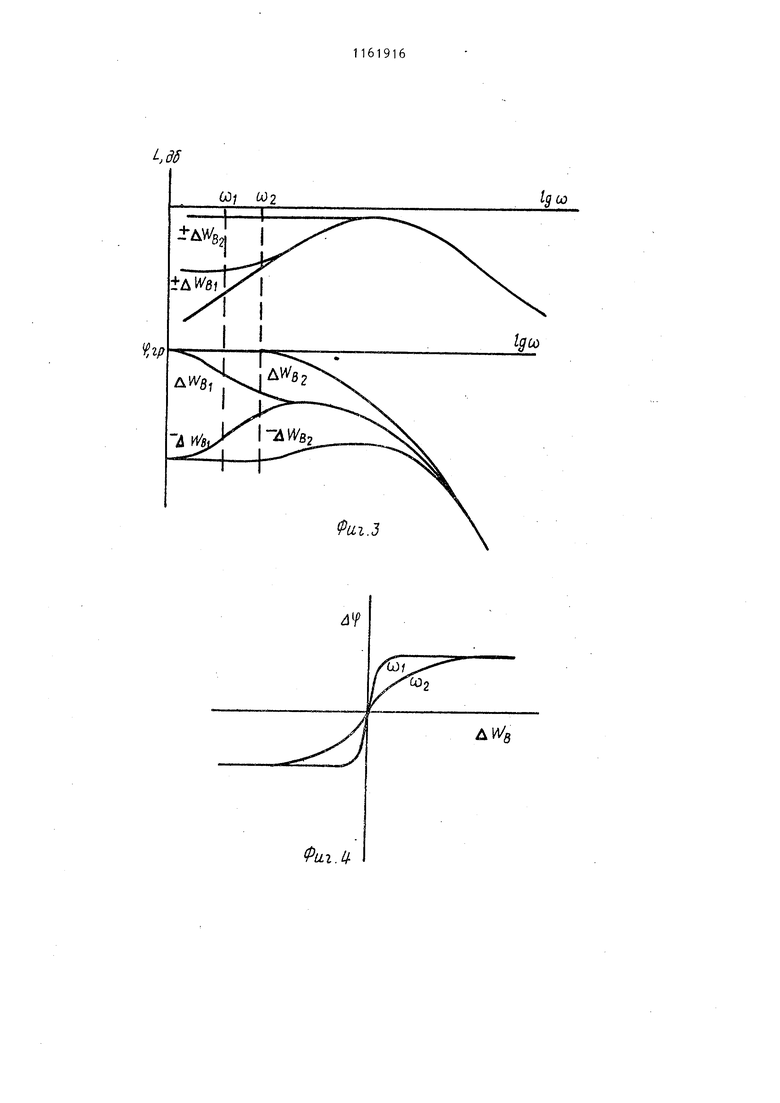
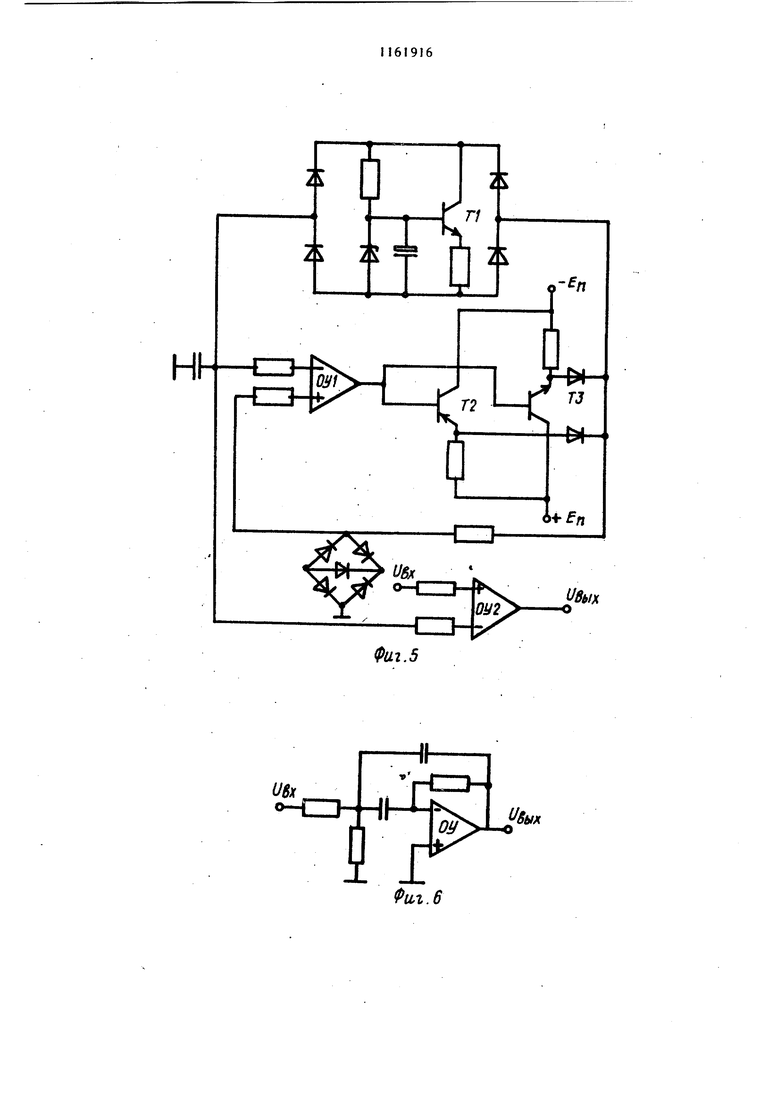
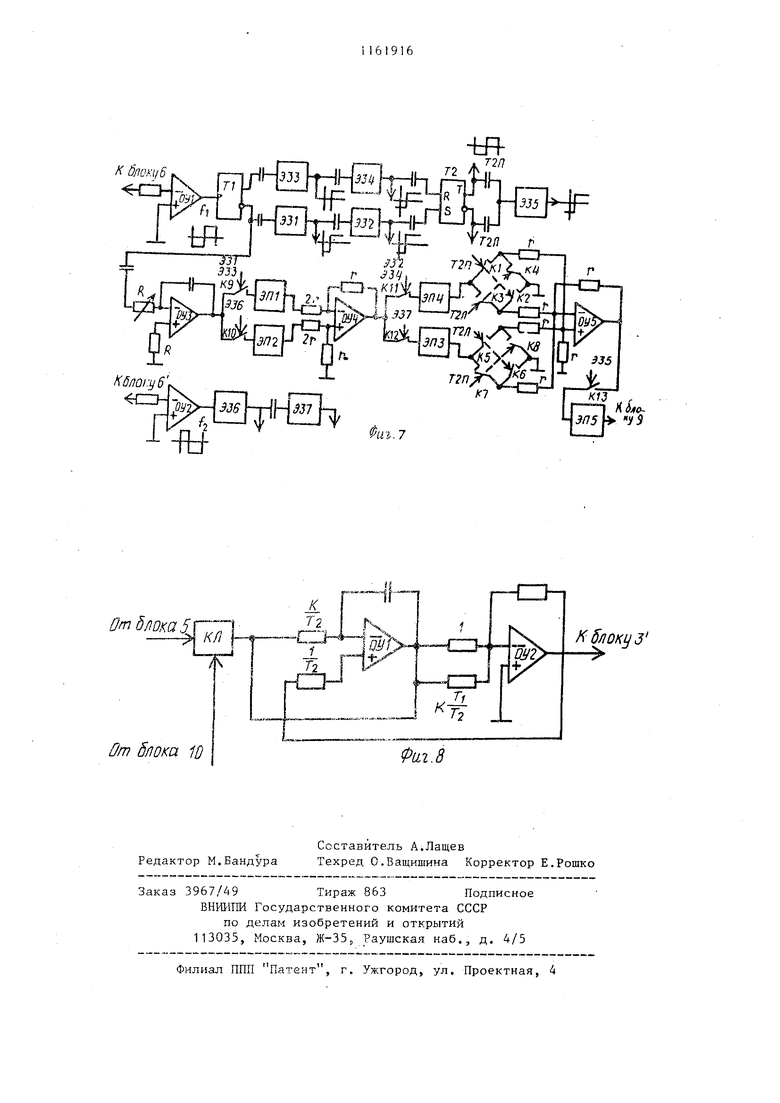
На фиг.1изображена функциональная схема устройства; на фиг.2 - функциональная схема блока управления; на фиг.З - амплитудные и фазовые частотные характеристики соотношения передаточных функций регулируемых координат смежных каналов управления к сигналам внешних возмусцений, действующих в одном из этих каналов, при изменениях передаточных функций взаимосвязей этих каналов и при отсутствии таких изменений; на фиг.4 - характеристики , отражающие зависимости рассогласования фаз между регулируемыми координатами смежных каналов управления от изменения передаточных функций взаимосвязей этих каналов при различных значениях частот регулярных составляющих возмущений на фиг.З - схема широтно-импульсного модулятора, на фиг.6 - схема полосового фильтра; на фиг.7 - схема фазового дискриминатора; на фиг.8 - схе ма корректирующего звена.
Устройство (фиг.1) содержит в каждом канале 1 последовательно соединенные исполнительный орган 2 и блок 3 управления. Выход исполнительного органа 2 через датчик 4 peгулируемой координаты соединен с первым входом сумматора 5 и входом полосового фи11ьтра 6. Ко второму входу сумматора 5 подается задающее воздействие. Выход сумматора 5 соединен с первым входом блока 3 управления и с входами первого и второго корректирующих звеньев 7 и 7 . Ко второму и третьему входам блока 3 управления подсоединены соответственно выходы второго корректирующег звена 7 первого смежного канала 1 и первого корректирующего звена второго смежного канала l, а выходы корректирующих звеньев 7 и 7 канала 1 соединены соответственно с третьим входом блока 3 управления и вторым входом блока 3 управ ления первого 1 и второго 1 смежны ему каналов. Выходы полосовых фильт ров 6 канала 1 и 6 первого смежного ему канала 1подаются соответственно на первый и второй входы фазового дискриминатора 8. Выход фазового дискриминатора 8 соединен входом регулятора 9 самонастройки, выход которого подан на вход широтн импульсного модулятора Ю, а выход последнего подключен к управляющим g входам корректирующих звеньев 7 и 7, На второй и третий входы исполнительного органа 2 канала 1 управления подаются сигналы с выходов испол нительных органов 2 и 2 смежных к налов l и l. Блок 3 управления каждого канала (фиг,2) Содержит последовательно соединенные регулятор 11, сумматор 12 и регуляторы 13 внутренних контуров управления данного канала. Устройство компенсации взаимосвязей работает следующим образом, В каждом канале 1 регулируемая ко ордината с выхода исполнительного органа 2 измеряется датчиком А (фиг.О, Полученный сигнал измерения подается на сумматор 5, определяю1ЦИЙ отклонение регулируемой координаты. Блок 3 управления (фиг.2) и корректирующие звенья 7 и 7 формируют закон управления регулируемой координаты канала 1 по ее отклонению и по отклонениям регулируемых координат смежных с данным каналом управления l и l , т.е. иг р;1Ч-ч И и-,141-гУз;.,и + Мк;мИ и-Чг1мЬ где Wp - передаточная функция регулятора 1 -го канала управления;.,,W. передаточные Функции второ го и первого корректирующих звеньев («-гО-го и (+1)-го каналов управления. 164 и - управление регулируемой Й,;,У5;.,.Ч,;м «о°рда °й у;; У ;i4i-i,4,4, заданные значения регулируемых координат и регулируемые координаты 1 -го, (i-l)-ro, (i+1)-ro каналов управления, И - число каналов управления, ,П . Передаточные функции корректирующих звеньев 7 выбирают таким образом, чтобы они компенсировали внутренние взаимосвязи объекта управления Wji, uetiWK; д:ji -p JO формированный сигнал управления с ыхода блока 3 управления поступает а исполнительный орган 2, Изменение параметров взаимосвязей бъекта управления приводит к наруению точности компенсации взаимовязей системы, что характеризуется ередаточной функцией взаимосвязи ежду регулируемыми координатами межных каналов управления при дейтвии внешнего возмущения на один з каналов управления )vfcWe,- (3 4; 1. деМУ,-,;,, передаточная функция между регулируемыми координатами (1 + 1)-й и -и при действии внешнего возмущения на i -и канал управления; ibW,U, передаточные функции, учитывакмцие малые некомпенсируемые постоянные времени i -го и (+t)-ro каналов управления} передаточные функции ха, рактеризующие исполнитель-ный орган и регулятор (+1)-го канала управле ij; - передаточная функция t го корректирующего эвена i Wg;передаточная функция, характеризующая иэменения вза освязк между i-M и ()-м каналами. Амплитудные и фазовые частотные арактеристики передаточной функции , различных значениях 4 Wg при- недены на фиг.З, где показано, что отклонение параметров взаимосвязей приводит к ограничению уровня фильтрации возмущений между смежными каналами управления и что это приводит к изменению величины и зна фазь передаточной функции W (см. фиг.4). Для реализации контура самонастройки параметров корректирующих звеньев, компенсирующих взаимосвязи системы, в каждом канале 1 сигна с выхода 4 регулируемой координаты проходит через полосовой фильтр 6, которьй имеет передаточную функцию, вида ИТрфр- (4) где Tpqj - постоянная рремени полосо вого фильтра; об, Н - коэффициенты, учитывающие усиление и заданную полосу пропускания со полосового фильтра. Выбор полосы пропускания фильтра обусловлен следующим. Из анализа приведенных соотношений (1), (2), (3) и графиков (фиг.З и 4) устанавливается, что точность компенсации взаимосвязей каналов будет тем ше, чем ниже значение G) , так -как при этом повышается чувствительност фазы соотношения (3) к отклонениям . параметров взаимосвязей, определяемая дифференциалом-.уЛ. Но с другой стороны динамические Отклонения регулируемых координат в функционирующей системе, возбужденной возмуща ющими воздействиями, могут практически отсутствовать на очень близких частотах. Поэтому задание частоты СО определяется минимальными значениями в полосе частот, действу ющих на систему возмущений. АвТоматическая настройка системы по низко частотным составляющим регулируемых координат одновременно соответствует и оптимальной фильтрации возмущений между каналами в широком спек ре воздействий. Сигналы с выходов полосовьпс фильтров 6 и 6 смежных каналов подается на фазовый дискриминатор 8, который определяет изменение фазово го сдвига Лср; между низкочастотными Составляющими значений регулируемых координат смежных каналов управления. Являющийся интегратором регулятор 9 самонастройки преобразует сигнал, пропорциональный изменению фазового сдвига йЦ) , в управляющий сигнал контура самонастройки, характеризующий изменение коэффициентов усиления взаимосвязей объекта управления. Широтно-импульсный модулятор 10 обеспечивает высокую точность модуляции управляющего сигнала. Полученный сигнал подается на электронные ключи корректирующих -7 т II звеньев / и / , что позволяет осуществить автоматическую поднастройку параметров корректирующих звеньев таким образом, чтобы они соответствовали взаимосвязям объекта управления, тогда iVi/g- 0, при этом условии uCf 0. При использовании предлагаемого способа компенсации взаимосвязей системы исключается возникновение предельных циклов колебаний между каналами, так как управление производится по малым отклонениям параметров взаимосвязей системы. Блоки,полосовых фильтров 6, широтно-импульсных модуляторов 10, фазовых дискриминаторов 8 и корректирующих звеньев 7 имеют стандартное исполнение и могут быть реализованы следующим образом. Наиболее простая . схема полосового фильтра 6, собранного на одном операционном усилителе (ОУ), приведена на фиг.6. На фиг.5 показана принципиальная схема широтно-импульсного модулятора, собранного на двух операционных усилителях. Фазовьй дискриминатор содержит два триггера Т1 и Т2, семь элементов задержки Э31-Э37, пять элементов памяти ЭГ11-ЭП5 с электронными ключами К9-К13, интегратор и сумматор соответственно на операционных усилителях ОУ1 и 072; блок инвертирования знака сигнала (операционный усилитель ОУЗ с двумя мостовыми ключевыми схемами К1-К4 и К5-К8 на входе). Ключи К1-К13, коммутирующие аналоговые сигналы, выполняются на полевых транзисторах. Элементы задержки Э31Э37 реализуют последовательное (от входа к выходу) замыкание ключей для исключения динамической погрешности элементов памяти и мостовых ключевых схем в дискриминаторе (фиг,7). Схема реализации передаточной функции корректирующего звена приведена на фиг.8. Она собрана на двух операционных усилителях. Перенастройку коэффициента передачи корректирующего звена обеспечивает электронный ключ на входе звена, для управления которым подается сигнал с выхода широтноимпульсного модулятора. Ожидаемый экономический эффект от использования изобретения в лентопротяжном механизме состоит в том, что при повышении точности компенса116 ции взаимосвязи каналов управления натяжением с каналом управления скоростью ведущего валика снижаются требования к точности изготовления механических элементов тракта (валиков, катушек, подшипников) и снижается стоимость изготовления механизма. Повышение стоимости системы управления за счет применения дополнительной платы с блоками контура самонастройки: полосовых фи.пьтров, фазовых дискриминаторов, регуляторов самонастройки и широтно-импульсных модуляторов, оказьшается значительно меньше.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с упругой связью между электродвигателем и механизмом | 1984 |
|
SU1241394A1 |
| Электропривод с упругой связью между электродвигателем и механизмом | 1981 |
|
SU1066012A1 |
| Устройство коррекции для компенсации упругого резонанса в электромеханических системах | 1981 |
|
SU991365A1 |
| Система управления с упругой механической связью | 1977 |
|
SU717717A1 |
| Устройство для предотвращения автоколебаний в следящей системе | 1982 |
|
SU1084722A1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
| Поисковый регулятор для резонансной настройки контура нулевой последовательности сети | 1982 |
|
SU1080231A1 |
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2006 |
|
RU2311568C2 |
УПРАВЛЯЮЩЕЕ УСТРОЙСТВО, содержащее в каждом канале управления последовательно соединенные блок управления и исполнительный орган, первое и второе корректирующее звенья, сумматор и датчик регулируемой координаты, подключенный входом к выходу исполнительного органа, а выходом - к первому входу сумматора, соединенного выходом с входами первого и второго корректирующих звеньев и с первым входом, блока управления, присоединенного вторым входом к выходу:второго корректирующего звена первого смежного канала, а третьим входом - к выходу первого корректирующего звена второго смежного канала, отличающееся тем, что, с целью, повышения точности устройства, оно содержит в каждом канале полосовой фильтр и последовательно соединенные фазовый дискриминатор, регулятор самонастройки и широтно-импульсНЫЙ модулятор, выход которого ПОДКЛЮ чен к управляющим входам первого корректирующего данного канала и второго корректирующего звена перво(Л го смежного канала, вход полосового фильтра соединен с выходом датчика регулируемой координаты, а выход с первьм входом фазового дискриминатора, ко второму входу которого подключен выход полосового фильтра первого смежного канала. 9 9 
«
К Вавку Ч
Igo}
аг.
О
2i 2S П Л
г/
Фиг.5
ивх
оЧГЭ Л 6fiOKt/6
ff/77 блока 10
Piii.S HF . )(дл1 J/75f J5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Морозовский В.Т | |||
| Многосвязные системы автоматического регулирования | |||
| М., Энергия, 1970, с | |||
| Нож для надрезывания подошвы рантовой обуви | 1917 |
|
SU269A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
