Изобретение относится к приводам производственных механизмов и устройств, приводные двигатели которых, не имея механической связи, должны вращаться с одинаковой скоростью, например механизм(в передвижения портальных и козловых кранов, крупных вибрационных машин (площадок), разводных мостов, сегментных затворов шлюзов, конвейеров и других механизмов.
Для обеспечения совпадения во времени перемещения осей (выравнивания нагрузок между двигателями) применяется электрическая синхронная связь. Она осуществляется при помощи схемы с дополни ельными (вспомогательными) машинами или схемы с общим регулятором (реостатом) 1J, Одним из недостатков схемы с общим реостатом является то, что автоматическое регулирование синхронизирующего момента путем изменения величины сопротивления общего реостата затруднительно. Необходимость регулирования синхронизирующего момента обусловлена тем, что изменение нагрузок на отдельные двигатели может происходить в сравнительно широком диапазоне и носить случайный характер.
Целью изобретения является обеспечение синхронного вращения асинхронных электродвигателей при широком диапазоне из.менения их нагрузок. Это достигается тем, что в предлагаемый многодвигательный элек- тропривод, содержащий асинхронные электродвигатели, обмотки роторов которых включены последовательно и соединены с регулятором, введены резисторы, трансформаторы напряжения и выпрямительные мосты, число которых в отдельности равно числу электродвигателей, дополнительный выпрямительный мост и блок управления ре- гулятором, при этом в одноименные фазы роторов каждого из электродвигателей включены резисторы, которые через трансформаторы напряжения подключены к входам выг прямительных мостов, выходы которых включены встречно к входу дополнительного выпрямительного моста, подключенного своим выходом к блоку управления регулятором.
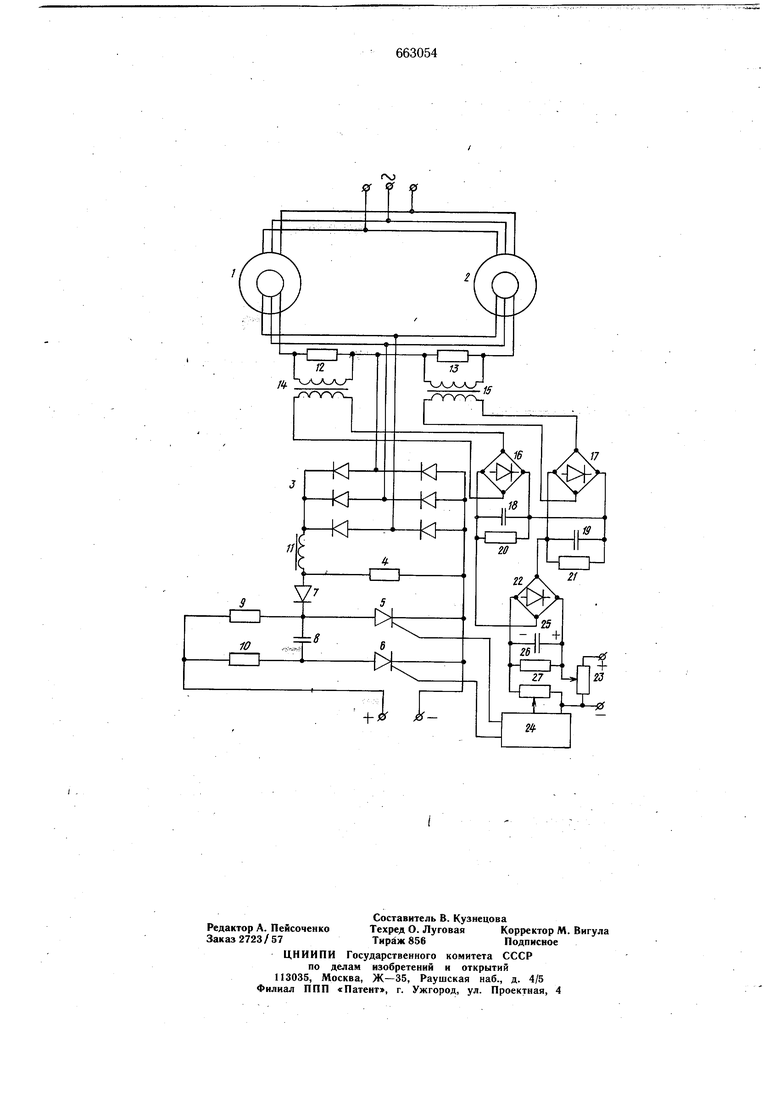
На чертеже дана схема описываемого электропривода.
Силовая часть схемы состоит из двух асинхронных электродвигателей I и 2, роторные цепи которых соединены электрически и включены на общий выпрямительный мост 3, собранный по схеме Ларионова. Со стороны постоянного тока мост замкнут на резистор 4. Параллельно резистору 4 подключен тиристорный коммутатор, состоящий из силового тиристора 5, тиристора 6 гашения,диода 7, конденсатора 8 и резисторов 9 и 10. Между выпрямительным мостом 3 и тиристорным коммутатором включен сглаживающий дроссель II, предназначенный для уменьшения пульсаций тока роторов двигателей 1 и 2. В одноименные фазы роторов электродвигателей 1 и 2 включены резисторы 12 и 13, которые через трансформаторы 14 и 15 напряжения подключены к вьшрямительным мостам 16 и 17. Со стороны постоянного тока к этим мостам подключены конденсаторы 18 и 19, служащие для сглаживания пульсаций выпрямленного напряжения, и резисторы 20 и 21, необходимые для уменьшения постоянной времени разряда конденсаторов 18 и 19. Выходы выпрямительных мостов, 16 и 17 включены встречно, и разность напряжения их выходов подается на выпрямительный мост 22, напряжение на выходе которого и.меет всегда постоянную полярность и равно абсолютному значению разности выпрямленных напряжений обратной связи. Последнее складывается с опорным напряжением противоположной полярности, снимаемым с потенциометра 23, и подается на вход блока 24 управления. Конденсатор 25 и резистор 26 имеют то же назначение, что и конденсаторы 18 и 19 и резисторы 20 и 21. Резистор 27 служит для задания величины сигнала обратной связи, при которой достигается максимальная величина эквивалентного сопротивления. Изменяя относительно время (скважность) включенного состояния силового тиристора 5 от единицы до нуля; можно, изменять .эквивалентную величину сопротивления в цепи выпрямленного тока роторов двигателей 1 и 2 от нуля до полного значения сопротивления резистора 4. Управление тиристорным коммутатором осуществляется при помощи блока 24 управления. Скважность управляющих коммутатором импульсов изменяется в соответствии с изменением напряжения на входе блока 24 управления, которое зависит от величины сигналов обратной связи. Когда напряжение на входе блока 24 управления равно нулю, скважность управляющих коммутатором импульсов максимальна и соответствующее ей значение эквивалентного сопротивления минимально. При определенном значении напряжения на входе блока 24 управления скважность его импульсов минимальна и соответствующее ей значение эквивалентного сбпрбтйвлёния максимально. В качестве сигналов обратной связи используются падения напряжений, снимаемые с резисторов 12 и 13. Падения напряжений прямо пропорциональны величинам токов фаз роторов двигателей 1 м 2. При равных моментах нагрузки на валах обоих двигателей 1 и 2 разность токов роторов двигателей равна нулю. Напряжение на входе блока 24 управления отсутствует, и величина эквивалентного сопротивления минимальна. При появлении определенной величины разности моментов, которой соответствует определенная разност токов одноименных фаз роторов двигателей 1 и 2, напряжение на входе блока 24 управления становится больше. Это приводит к уменьшению скважности управляющих коммутатором импульсов и росту эквивалентного сопротивления в цепи выпрямленного тока роторов двигателей 1 и 2. Таким образом, каждому определенному значению разности моментов в заданных пределах соответствует определенная величина эквивалентного сопротивления, обеспечивающая синхронное вращение двигателей 1 и 2. При помощи потенциометра 23 устанавливается минимальная величина сигнала обратной связи, при,которой блок 24 управления начинает реагировать на его изменение, а резистором 27 задаеется величина сигнала обратной связи, при которой достигается максимальная величина эквивалентного сопротивления. Формула изобретения Многодвигательный электропривод переменного тока, содержащий асинхронные электродвигатели, обмотки роторов которых включены последовательно и соединены с регулятором, отличающийся тем, что, с целью обеспечения синхронизации скоростей при широком диапазоне изменения нагрузок, в него введены резисторы, трансформаторы напряжения и выпрямительные мосты число которых в отдельности равно числу электродвигателей, дополнительный выпрямительньш мост и блок управления регулятором, при этом в одноименные фазы роторов каждого из электродвигателей включень резисторы, которые через трансформаторы напряжения подключены к входам выпрямительных мостов, выходы которых. включены встречно к входу дополнительного выпрямительного моста, подключенного своим выходом к блоку управления регулятором. Источники информации, принятые во внимание при экспертизе 1. Чиликин М. Г. Общий курс электропривода. М.-Л., «Энергия, 1965, с. 176- 186.
O
VT
1
-fjs- A

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1991 |
|
RU2056699C1 |
| Электропривод переменного тока | 1986 |
|
SU1403321A1 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1987 |
|
SU1518857A1 |
| РЕГУЛЯТОР ВОЗБУЖДЕНИЯ СИНХРОННОГО ДВИГАТЕЛЯ | 1995 |
|
RU2084075C1 |
| УСТРОЙСТВО ПУСКА СИНХРОННОГО ДВИГАТЕЛЯ | 2008 |
|
RU2396692C1 |
| Устройство для управления асинхронным электродвигателем | 1980 |
|
SU917293A1 |
| Электропривод переменного тока | 1991 |
|
SU1823117A1 |
| Стенд для испытания двигателяВНуТРЕННЕгО СгОРАНия | 1979 |
|
SU811092A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ЭЛЕКТРОПРИВОДА АГЛОЛЕНТЫ | 2002 |
|
RU2232121C1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |