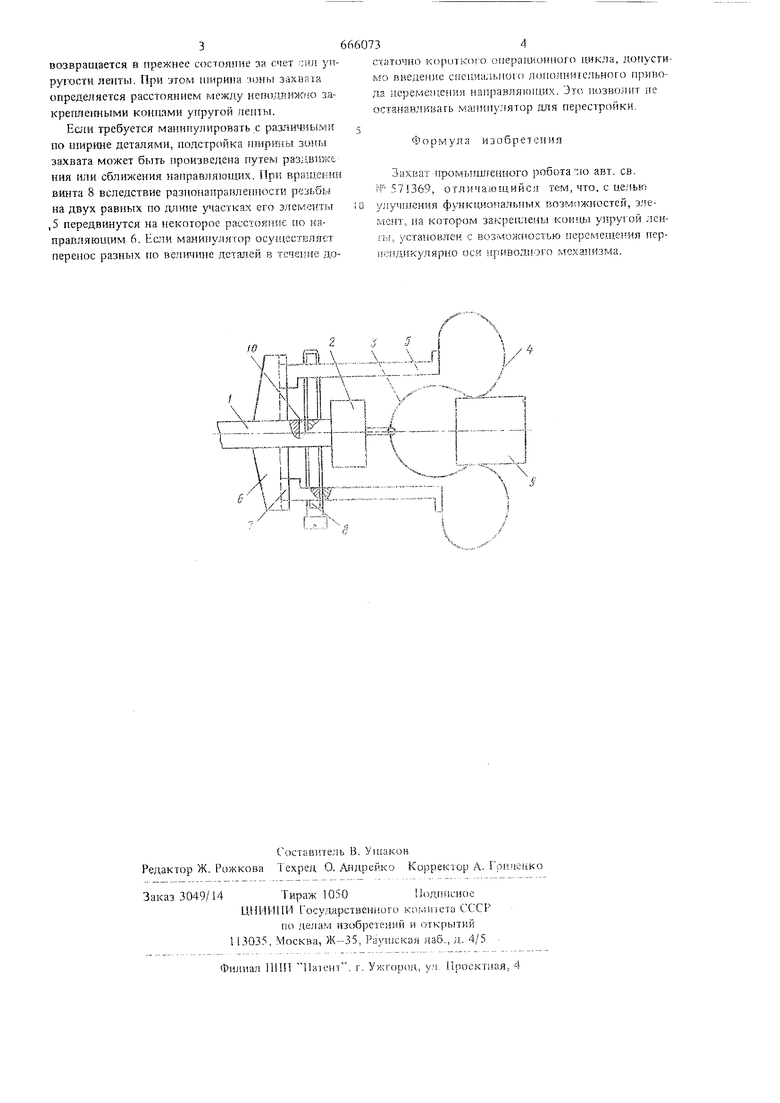
(54) ЗАХВАТ ПРОМЫШЛЕ П10ГО РОГЮТА возвращается в прежнее состоямие за счет сил упругости ленты. При этом хиирниа зоны захвата определяется расстоянием между неподвижно закрепленными концами упругой ленты. Если требуется манипулировать с различными по urapjffle деталями, подстройка ширины зоны захвата может быть произведена путем раздвижь кия или сближения направляющих. При вращении винта 8 вследствие разнонаправлешюсти резьбы на двух равных по участках его элементы ,5 передвинутся на некоторое расстояние по направляющим 6. Если манипулятор осуществляет перенос разных по величюш деталей в течение до34статочно KopoTKOfo операционного цикла, допустимо введение специального дополнительного привода перемещения на11равляюпл,их. Это позволит не останавливать ма шпулятор для перестройки. Формула изобретения Захват промышленного робота чю авт. св. N 571369, отличающийся тем, что, с целью улучшения функциональных возможностей, элемент, на котором закреплены концы упрутой ленты, установлен с возможностью перемещения перпендикулярно оси приводного механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2008 |
|
RU2371305C1 |
| Захват промышленного робота | 1978 |
|
SU768634A1 |
| Подающий механизм для последовательной подачи с гибкой несущей ленты установленных в ней с равными промежутками крепежных деталей с головками и клепальная машина | 1985 |
|
SU1512477A3 |
| Промышленный робот | 1986 |
|
SU1400883A1 |
| Устройство для сортировки деталей типа дисков | 1985 |
|
SU1276375A1 |
| УСТРОЙСТВО ДЛЯ МАРКИРОВАНИЯ ИЗДЕЛИЙ | 1993 |
|
RU2041832C1 |
| Оптико-механический затвор | 1988 |
|
SU1578684A1 |
| СОЕДИНИТЕЛЬНОЕ УСТРОЙСТВО | 2010 |
|
RU2533658C2 |
| Схват манипулятора | 1986 |
|
SU1390019A1 |
| Устройство для получения деталей одежды, выкраиваемых из полотна материала | 1990 |
|
SU1837818A3 |
to
