.1
Изобретение относится к машиностроению, а именно к захватным устройствам промьшшенных роботов.
Цель изобретения - расширение технологических возможностей путем захвата деталей неправильной формы.
Указанная цель достигается тем, что схват снабжен телескопическими полыми направлякнцими, внутри кото- рых размещены дополнительные упругие ленты, образующие с основными единую ленту, при этом захватные рычаги выполнены с возможностью перемещения относительно ленты,
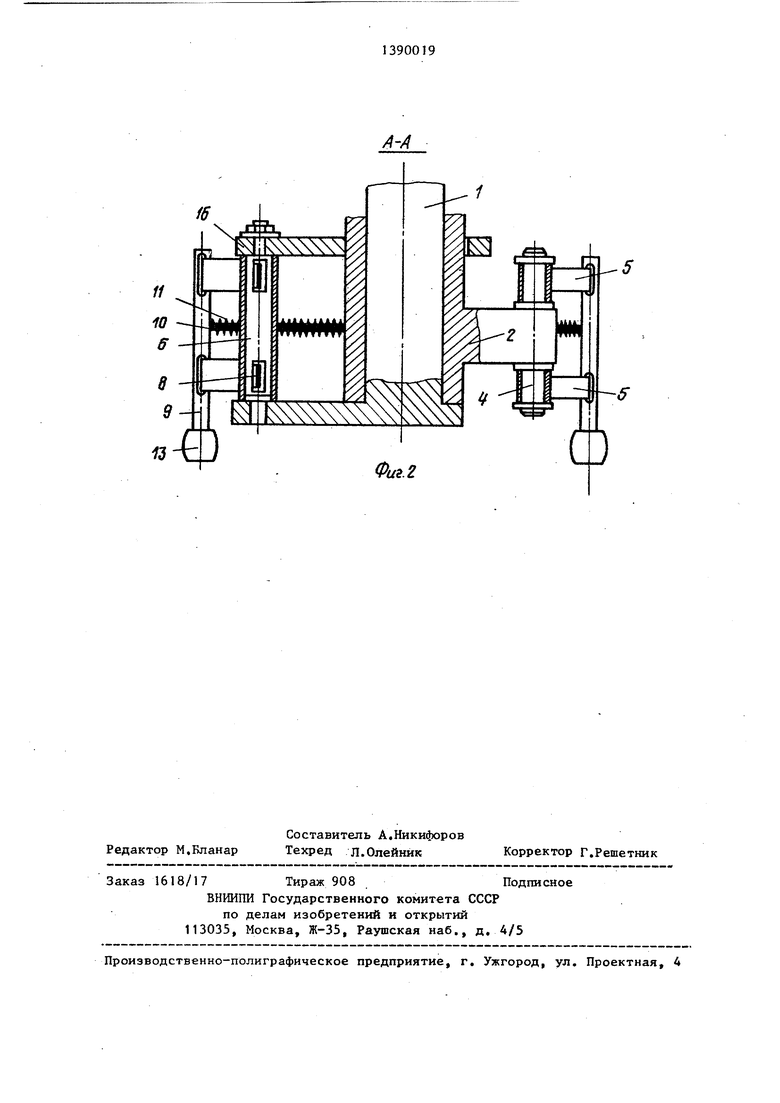
На фиг.1 изображен схват, общий вид; на фиг.2 - разрез А-А на фиг.1,
Скват содержит корпус 1, поворотное кольцо 2, установленные с возможностью их взаимного относитель ного поворота и связанные с приводом (не показан), В корпусе 1 расположена ось 3, а в поворотном кольце - ось А соединения с единой упругой лентой 5 (например, стальной). В корпусе I установлены стойки 6, в поворотном кольце - стойки 7, Через отверстия 8 в стойках 6 и 7 проходят упругие ленты 5, которые проходя через отверстия в захватных рычагах 9. Дпя того, чтобы захватные рычаги 9 могли возвращаться после захвата в исходное положение, они связаны со штоком 10 и подпружинены относительно корпуса 1 с помощью поужин 11. Штоки 10 центрально симметричны относительно общей оси схвата и входят в пазы 12, расположенные в корпусе 1 перпендикулярно этой оси. На концах захватные рычаги 9 имеют губки 13 бочкообразной формы. На стойках 6 и 7 установлены телескопические полые направляющие 14 и 15, причем наружные размеры направляющих 14 меньше внутренних размеров направляющих 15, Ось 3, а также стойки 6 связаны между собой фпанцем 16, Единая упругая лента 5 состоит из основных Б и допол 1Штельных В участков,
Схват работает следующим образом. Схват вводится в рабочую зону. В зависимости от конфигурации захватываемой детали ( не показана ) зах- ватньш рычаги 9 располагаются у ее
наружной или внутренней поверхности
Корпус I и поворотное кольцо 2
ю 15
20 25 30 jj 40
50
55
ворачиваются приводом в разных направлениях. В случае удаления осей 3 и 4, связанных с упругой лентой 5, происходит выгибание последней наружу и захватные рычаги 9 под воздействием пружин 11 при удалении от общей оси схвата зажимают деталь за внутренние поверхности. При изменении направления поворота корпуса 1 и поворотного кольца 2 происходит зажим детали за наружные поверхности.
Упругая лента 5 может двигаться относительно захватных рычагов 9, поэтому возможен захват деталей неправильной геометрической формы, при этом обеспечивается одинаковое усилие захвата детали всеми рычагами 9, За счет подпружинивания рычагов 9 с помощью пружин 11 и штоков 10 повышается надежность захвата, а именно при захвате за внутренние полости исключена возможность прогиба упругой ленты в обратную сторону, а также увеличивается сила захватывания, а после окончания захвата за наружные поверхности за счет подпружинивания рычаги 9 возврао(аются в исходное положение. Изгиб упругих.лент на участках между стойками 6 и 7 предотвращают направляющие 14 и 15, которые при повороте входят одна на другую.
Освобождение осуществляется в обратной последовательнобти.
Формула изобретения
Схват манипулятора; содержащий корпус, поворотное относительно корпуса кольцо и основные упругие ленты с захватными рычагами, отличающийся тем, что, с ц елью расширения технологических возможностей путем захвата деталей неправильной формы, схват снабжен закрепленными на корпусе и поворотном кольце полыми телескопическими направляющими, в которых размещены введенные в схват дополнительные упругие ленты, образующие с основными единую ленту, один конец которой закреплен на корпусе, а другой - на поворотном кольце, при этом захватные рычаги установлены с возможностью перемещения относительно единой ленты и подпружинены относительно корпуса.
//
13
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Схват манипулятора | 1988 |
|
SU1618646A1 |
| Схват манипулятора | 1986 |
|
SU1366393A1 |
| Захватное устройство манипулятора | 1987 |
|
SU1458222A1 |
| АВТОМАТ ДЛЯ СБОРКИ УЗЛОВ | 1991 |
|
RU2022752C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Захватное устройство | 1984 |
|
SU1288046A1 |
| Захватное устройство | 1987 |
|
SU1498610A1 |
Изобретение относится к области машиностроения, а именно к захватным устройствам промышленных роботов. Изобретение позволяет расширить технологические возможности путем обес15 печения захвата деталей неправильной формы.. Для этого схват снабжен телескопическими полыми направляющими, в которых размещены дополнительные упругие ленты, образующие с основными единую, связанную с захватными рычагами, ленту. В корпусе 1 размещено поворотное кольцо 2 и захватные рычаги 9. Концы единой упругой ленты 5 соединены с корпусом 1 и поворотным кольцом 2 и проходят через телескопические полые направляющие 14 и 15. При этом захватные рычаги 9 установлены с возможностью перемещения относительно ленты 5 и подпружинены посредством пружины 11 и штоков 10 относительно корпуса 1. 2 ил. i СЛ со со со
| Захватное устройство | 1983 |
|
SU1199612A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
