Изобретение относится к механизитрованным крепям очистных забоев. Известно устройство дистанционного управления секцией механизированной крепи, включающее датчики контро ля, датчики распора секции крепи, элементы памяти и логические элеменНедостатком известного устройства являются большие непроизводительные затраты времени, связанные с необходимостью подачи нескольких импульсов, и малая надежность. Наиболее близким к данному изобретению по технической сущности и достигаемому результату является устройство дистанционного управления секцией механизированной крепи, содержащее командный и исполнительный распределители и рукава для подачи давления на соседнюю секцию 2. Однако, как показали шахтные . испытания, указанная система обладае рядом недостатков. При подаче одного импульса шаговы механизм (и исполнительный распределитель) перемещается только на один шаг. Число импульсов для выбора нужной позиции зависит от предшеству щего положения распределителя. Например, для выбора позиции три необходимо подать три импульса, если распределитель стоит на позиции нуль, или один импульс, если распределитель стоит на позиции .два, и т.д. Такая неопределенность приводит к необходимости визуального контроля положения исполнительного распределителя, находящегося на соседней секции, что в условиях лавы весьма затруднительно. Большие непроизводительные затраты времени связаны с необходимостью подачи нескольких импульсов,; контролем положения исполнительного распределителя и дополнительными модуляциями с командным распределителем. Целью изобретения является повьаиение надежности и скорости дистанционного управления механизированной крепью. Поставленная цель достигается тем, что исполнительный распределитель выполнен в виде -логических клапанных элементов с функциями запрет. соединенных между Собой каналами и имеющих коммутационные рукава управления.
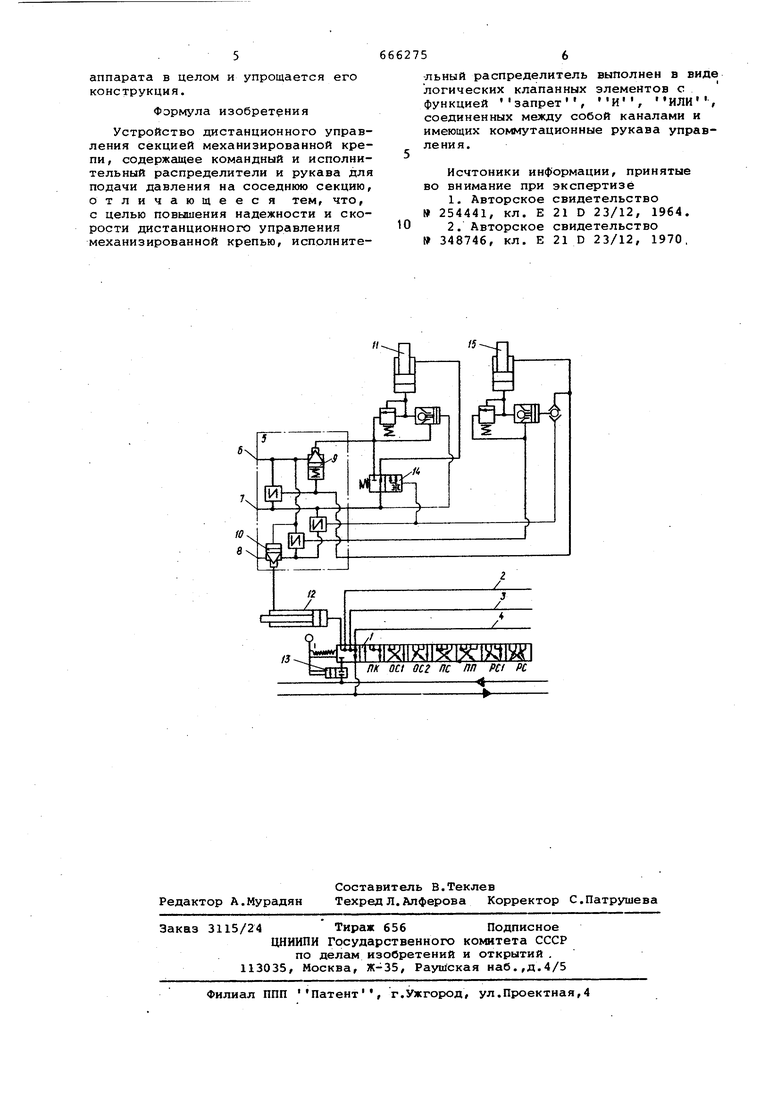
На чертеже схематично представлено предлагаемое устройство.
На каждой секции крепи устанавливается распределитель 1, позволяющий подавать давление на соседнюю секцию лие5о по одному из трех рукавов 2-4, либо попарно в различных сочетаниях.
Рукава 2-4 на соседней секции подводятся к исполнительному блоку
5и подсоединяются к входным каналам
6- 8 соответственно.
Исполнительный блок 5 состоит из двух клапанов 9 и 10 с логической функциейзапрети трех клапанов с логической функцией И.Каждый из трех клапанов с логической функцией Ивключен параллельно двум входны каналам,образующим три пары при различных сочетаниях их включения. При соответствующем включении клапан 9 запирает поршневые полости стоек 11 забойного ряда а клапан 10 - штоковые полости домкратов 12 передвиж- . ки.
Устройство обеспечивает выполнени одной местной операции - передвижки конвейера - и шести дистанционных с соседней секции: опускания забойного ряда стоек, опускания посадочного ряда стоек, передвижки секции активным подпором, передвижки секции с опущенным перекрытием, распора забойного ряда стоек и распора всех стоек.
Все операции выполняются распределителем 1, в который вмонтирован клапан 13 отсечки нагнетания. Таким образом, переключение распределителя происходит без подачи давления.
Давление по рукаву 3 подается на соседнюю секцию в канал 7 и открывает замок забойного ряда стоек 11, а через переключатель 14 поступает в штоковые полрсти стоек 15.
При выполнении различных операций протекание жидкости происходит следующим образом.
Передвижка конвейера (позиция ПК) Давление подается в порчшевую полост домкрата 12. Из штоковой полости жидкость вытесняется через клапан 10, канал 8 и по рукаву 4 на слив соседней -секции.
Опускание забойного ряда стоек (позиция ОС1). Давление по рукаву 3 подается на соседнюю секцию в канал 7 и открывает гидрозамок забойного ряда стоек Ц (на чертеже условно изображена одна стойка), а через переключатель 14 поступает в штоковые полости стоек. Из поршневы полостей стоек через гидрозамок, клапан 9, кангш 6, рукав 2 и распределитель 1 жидкость вытесняется в сливную магистраль.
Опускание посадочного ряда стоек (позиция ОС2). .Давление подается одновременно по рукавам 2 и 3 на соседнюю, секцию в каналы 6 и 7. Поя.вившееся на выходе клапана И давление запирает клапан 9, препятствуя распору стоек 11, и поступает в штоковые полости стоек 15 (на чертеже условно показана одна стойка), а через клапан ИЛИ открывает гид5 розамок-этих стоек. Из поршневых полостей жидкость вытесняется через гидрозамок, клапан И, канал 8 и по рукаву 4 далее в сливную магистраль .
0 Передвижка секции с опущенным перекрытием (позиция ПС). Давление подается по рукаву 4, каканалу 8 и через клапан 10 в штоковые полрсти домкратов. Из поршневых полостей жидкость вытесняется на слив через распределитель 1.
Передвижка секции с активным подпором (позиция ПП). Давление по рукавам 3 и 4 одновременно подается в
0 каналы 7 и 8 и поступает через клапан 10 в штоковую полость домкрата.На выходе клапана И появившееся давление с одной стороны через клапан ИЛИ открывает гидрозамок стоек
5 15, с другой - переключает переключатель 14. При этом штоковые полости стоек 11 соединяются с поршневыми, так как давление в канале 7 открывает гидрозамок . Через дроссель переQ ключателя 14 поршневые и штоковые полости стоек получают постоянную подпитку жидкостью. Величина давления в этих полостях регламентируется .усилием регулируемой пружины клапана 9.
5 При превьЕиении давления настройки избыток жидкости по каналу б и рукаву 2 поступает на слив соседней секции.
Распор забойного ряда стоек (позиция РС1). Давление подается по рукаву 2, каналу 6 и через клапан 9 поступает в поршневые полости стоек забойного ряда. При этом клапан 10 запирает штоковые полости домкратов 12,
5 удерживая секцию от сползания.
Распор всех стоек (позиция PC). Давление подается одновременно по рукавам 2 и 4 и поступает в каналы 6 и 8. Появившееся давление на выходе
0 клапана И поступает в поршневые полости стоек посадочного ряда. В стойки заб.ойного ряда давлениеиз канала 6 поступает как и при операции РС1.
г При этом штоковые полости домкратов 12 передвижки также запираются клапаном 10, что не позволяет сползать секции во время распора.
Предлагаемое устройство свободно от перечисленных недостатков и позволяет одной установкой распределителя на требуемую позицию выполнять любую из шести дистанционно выполняемый операций на соседней секции. Устройство не имеет сервомеханика,
5 следовательно, сокращаются габариты
аппарата в целом и упрощается его конструкция.
Формула изобретения
Устройство дистанционного управления секцией механизированной крепи, содержащее командный и исполнительный распределители и рукава для подачи давления на соседнюю секцию, отличающееся тем, что, с целью повышения надежности и скорости дистанционного управления механизированной крепью, исполнительный распределитель выполнен в виде логических клапанных элементов с функцией запрет, И , ИЛИ, соединенных между собой каналами и имеющих коммутационные рукава управления.
Исчтоники информации, принятые во внимание при экспертизе
1. Авторское свидетельство 254441, кл. Е 21 D 23/12, 1964. 2. Авторское свидетельство
348746, кл. Е 21 D 23/12, 1970,
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДОЛИНСКОГО МКД, СИСТЕМА УПРАВЛЕНИЯ КРЕПЬЮ, МЕЖСЕКЦИОННАЯ ЗАТЯЖКА КРЕПИ, ГИДРОСИСТЕМА КРЕПИ | 1999 |
|
RU2181842C2 |
| Устройство для управления секцией гидрофицированной крепи | 1989 |
|
SU1705589A1 |
| Гидросистема управления секцией механизированной крепи | 1987 |
|
SU1509542A1 |
| Система управления секциями крепи угледобывающего агрегата | 1986 |
|
SU1320444A1 |
| Гидросистема механизированной крепи | 1988 |
|
SU1652601A1 |
| Механизированная крепь | 1982 |
|
SU1153079A1 |
| Устройство обеспечения подпора | 1975 |
|
SU746121A1 |
| Устройство дистанционного управления секцией механизированной крепи | 1981 |
|
SU1010287A1 |
| Секция механизированной шахтной крепи | 1980 |
|
SU939779A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СЕКЦИЕЙ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1990 |
|
RU2018686C1 |
(11 11КП$ 1 ШШ
ПК act ОС2 ПС пп pci PC
