. Изобретение относится к самоходным грузоподъемным машинамдляподъе ма и установки в проектное положение строительных конструкций типа колонн балок, мачт и т.п. Известен манипулятор для захвата и перемещения листового материала,; содержащий тележку, снабженную платформой, на которой с возможностью пе ремещения установлена стрела с грузд захватным органом 1. Этот манипулятор имеет ограниченную рабочую зону и не обеспечивает захвата материала из любых полоясений Наиболее близким к предлагаемому являетдя самоходное грузоПодъ1емное устройство с опорно поворотным круго р платформой, несущей стрелу с закрепленной на ней стойкой, в продольных направляющих -которой устан.овлена оройма с опорой и грузозахватным при способлением 2 . Недостатком этого устройства является то,что захват колонн или столбов может бытьОсуществлен только; .при определенной их ориентации по отношению к центру поворотной платформьа, а точная установка на место невозможна без ручной доводки. Цель изобретения - обеспечение возможности точной устанойки длинномерных элементов, например строительных Конструкций типа колонн и балок, под любым заданным углом к горизонту с захватом их из любых положений. Это достигается тем, что самоходное грузоподъемное устройство снабжено жестко соединенной с опорноповоротным кругом рамой, а платформа со стрелой расположена на этой paMje, причем стрела соединена со стойкой с возможностью поворота последней вокруг своей продольной оси, а грузозахватное приспособление установлено в опорах обоймы с возможностью поворота вокруг оси. Перпендикулярной продольной оси стойки. ,Такое.выполнение устройства обеспечивает точную механизиройанную установку длинномерных элементов в проектное положение, что повышает производительность труда на монтаже и обеспечивает безопасность работ. На фиг, 1 представлено предлага-. емое самоходное грузоподъемное устройство, общий вид; на фиг. 2 - раэрез А-А на фиг. 1; на фиг. 3 узел установки платфорг ы на раме, соединенной с опорно-поворотным кругом
устройства; на фиг. 4 - разрез на фиг. 3; нафиг. 5 - стрела и установленная на ней стойка с р бой мой и ™ff g Sc53 SxBa Hffira при спБс и ямиТ на фиг. б - разрез В-В на фиг. 5; на фиг. 7 - разрез Г-Г на фиг. 5 ; на фиг. 8 - разрез Д-Д на фиг. 5; На фиг. 9 - грузозахватное приспособление с механизмом его поворота; на фиг. 10 - разрез Б-Е на фиг. 9.
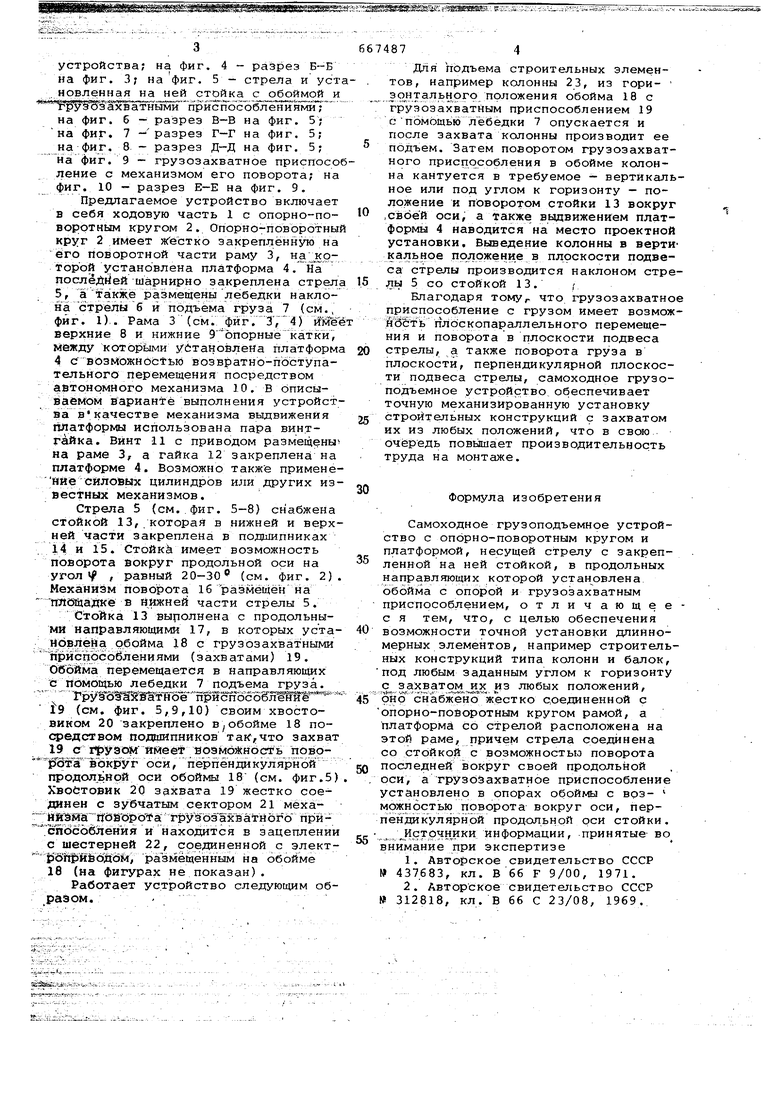
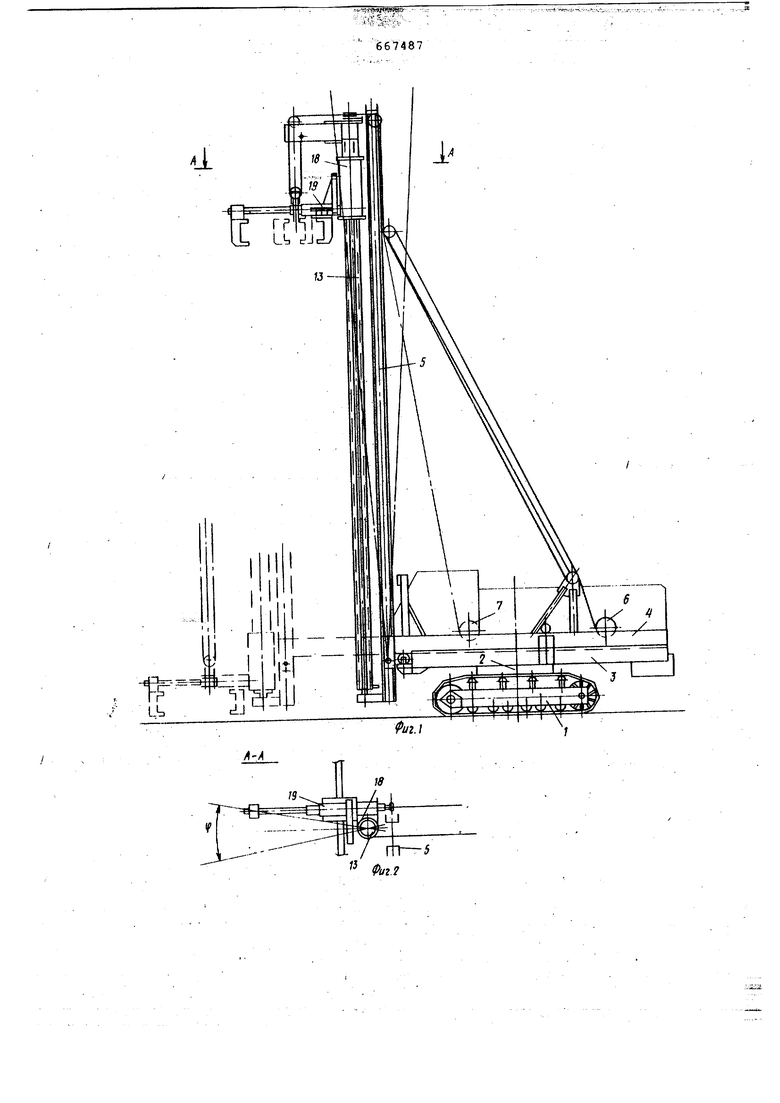
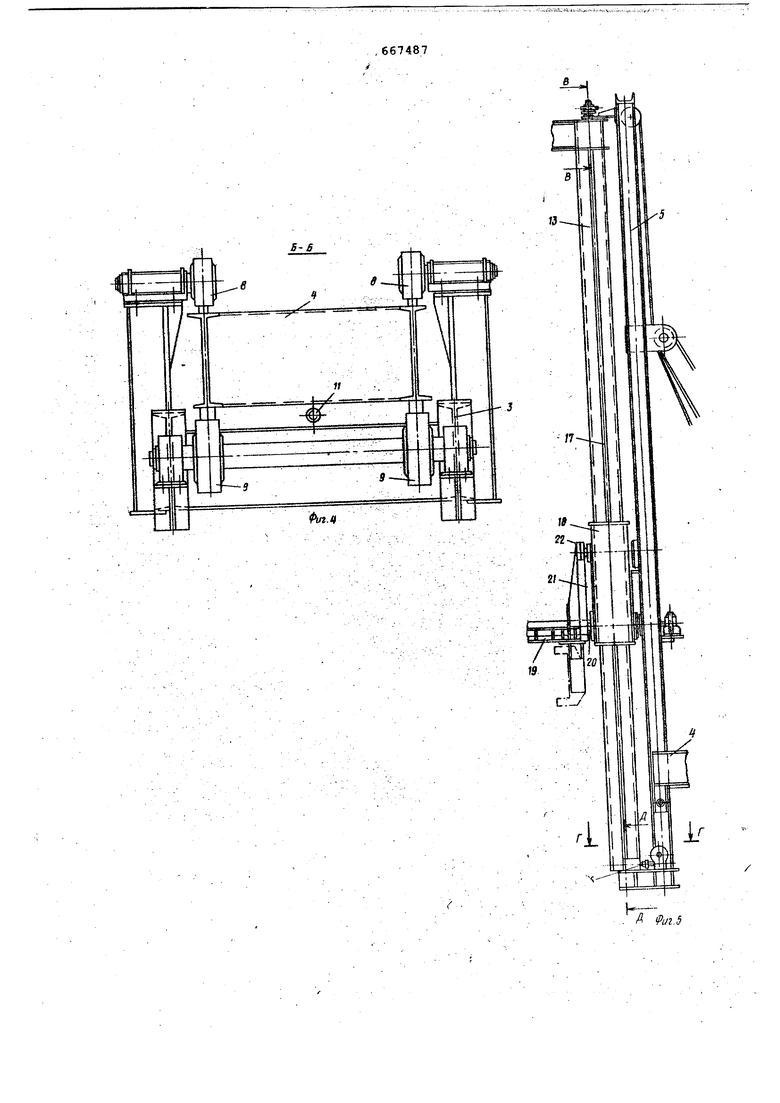
Предлагаемое устройство включает в себя ходовую часть 1 с опорно-поворотным кругом 2. Опорно-поворотный круг 2 имеет « естко закреплённую на его поворотной части раму 3, Ha;jcoторой установлена платформа 4.на послёдйей шарнирно закреплена стрела 5, атакж.е размещенылебедки наклона стрелы б и подъема груза 7 (см., фиг. 1),. Рама 3 (см. фиг. 37 4) иШет верхние 8 и нижние 9 опорныё катки, между KOTOpbiMH установлена платформа 4 с BO3MOKHoctbio возвратно-поступательного перемещения посредством автономного механизма 10. В описываемом варианте выполнения устройства вкачестве механизма выдвижения платформы использована пара винтгайка. Винт 11 с приводом размещ ны на раме 3, а гайка 12 закреплена на платформе 4. Возможно также примене нйесиловых цилиндров или других известных механизмов.
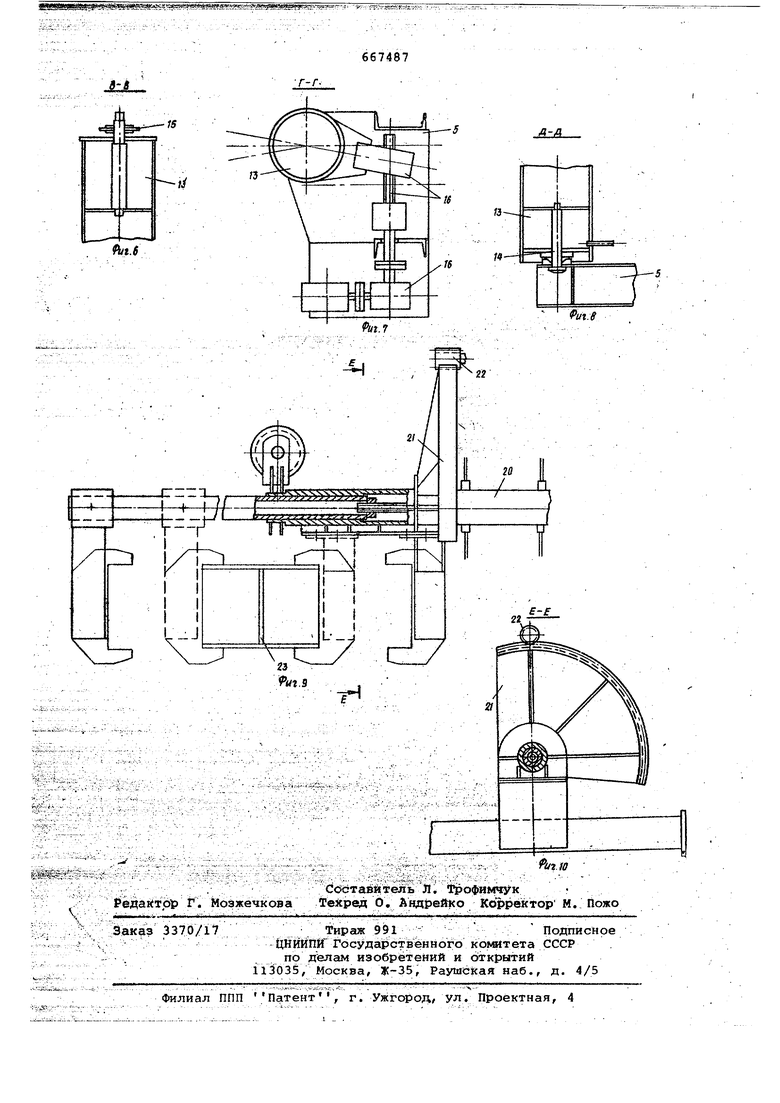
Стрела 5 {см. фиг. 5-8) снабжена стойкой 13,.которая в нижней и верхней части закреплена в подшипниках 14 и 15. Стойки имеет возможность поворота вокруг продольной оси на угол vf , равный 20-30 (см. фиг. 2). Механизм поворота 16 размещён на П71Ш1адкё S нижней части стрелы 5.
Стойка 13 выролнена с продольными направляющими 17, в которых установлена обойма 18 с грузозахватными приспособлениями (захватами) 19. Обойма перемещается в направляющих с помощью лебедки 7 подъема груза. У;--:Гр1 1Ш1ВШ1 Шё- йспосоет11гаГ - i 9 (см. фиг. 5,9,10) своим хвостовиком 20 закреплено в у обойме 18 посредством подшипников так,что захват 19 с rtJyScxM имеет ВоэмОЛнОсть поврgSfS вокруг оси, пёрпендику лярной продольной оси обоймы 18 (см. фиг.5). Хвостовик 20 захвата 19 жестко соединен с зубчатым сектором 21 мёхаЙШ)й& пвйОрО1 ау грузоза прйспбсоблёния и н аходитс я в з ацепл ении с шестерней 22, среданенной с электрШЩёбд дМ, размёщенным на обойме 18 (на фигурах не показан).
Работает устройство следующим обраэом.
4874
Для подъема строительных злементов, например колонны 23, из горизонтальногр прложения обойма 1В с грузозахватным приспособлением 19 спомощью лебедки 7 опускается и после захвата колонны производит ее подъем. Затем поворотом грузозахватного приспособления в обойме колонна кантуется в требуемое - вертикальное или под углом к горизонту - положение и поворотом стойки 13 вокруг
,сВоёй оси, а также выдвижением платформы 4 наводится на место проектной установки. Выведение колонны в вертИ кальное прлржени.е в плрскости подвеса стрелы производится наклоном стрелы 5 со стойкой 13. /
Благодаря тому,, что грузозахватное приспособление с грузом имеет возможнбсть плоскопараллельного перемещения и поворота в плоскости подвеса
стрелы, а также поворота груза в
плоскости, перпендикулярной плоскости подвеса стрелы, самоходное грузоподъемное устройство, обеспечивает точную механизированную установку
строительных конструкций с захватом их из любых положений, что в свою очередь повьошает производительность труда на монтаже.
Формула изобретения
Самоходное грузоподъемное устройство с опОрно-поворотным кругом и платформой, несущей стрелу с закрепленной на ней стойкой, в продольных направляющих которой установлена обойма с опорой и грузозахватным приспособлением, отличающее с я тем, что, с целью обеспечения
возможности точной установки длинномерных элементов, например строительных конструкций типа колонн и балок, под любым заданным углом к горизонту с захватрм с из любых положений,
оноснабзке но жестко соединенной с опорно-поворотным кругом рамой, а платформа со стрелой расположена на этой раме, причем стрела соединена со стойкой с возможностью поворота
последней вокруг своей продольной оси, а грузозахватное приспособление установлено в опорах обоймы с воз- мржностью прворота вокруг оси, перпёндакулярнрй продольной реи стойки. Истрчн.ики информации, принятые- во
внимание при экспертизе
1.Авторское свидетельство СССР 437683, кл. В 66 F 9/00, 1971.
2.Авторское свидетельство СССР 312818, кл. В 66 С 23/08, 1969.
-Т
S
Vl
/7
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНЫЙ ДВУХСТРЕЛОВОЙ КРАН | 2011 |
|
RU2465191C2 |
| Транспортное средство для перевозки длинномерных грузов | 1980 |
|
SU943031A1 |
| ПЕРЕДВИЖНОЙ ГРУЗОПОДЪЕМНЫЙ КРАН | 2002 |
|
RU2238236C2 |
| ПОГРУЗОЧНО-ТРАНСПОРТНАЯ МАШИНА ДЛЯ СОРТИМЕНТОВ | 1991 |
|
RU2026211C1 |
| Подвеска грузозахватного органа крана | 1978 |
|
SU775039A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2237612C2 |
| Колесный погрузчик-штабелер | 1969 |
|
SU454160A1 |
| НАВЕСНАЯ ТРЕЛЕВОЧНАЯ ТЕЛЕЖКА | 2022 |
|
RU2785391C1 |
| Портальный погрузчик | 1980 |
|
SU943191A1 |
20
19
-I
U--
fl iPui.5
