Уже известны андроиды (человекоподобные машины), у которых механические конечности составлены из звеньев, поворотных в суствах относительно друг друга и приводимых в движение из центрального пункта при помощи механической передачи от сервомоторов.
Предлагаемый андроид, звенья которого обладают значительным количеством степеней свободы, имеет ту особенность, что передача состоит из нескольких (по числу звеньев) систем концентрично расположенных полых валов, которые соединены в суставах при помощи укрепленных на концах полых валов конических зубчатых щестерен посредством систем промежуточных шестерен, расположенных в суставах и служащих: одни - для поворота звеньев вокруг их собственных продольных осей, а другие - для вращения расположенных в суставах цепных колес, предназначенных для осуществления поворота звеньев и суставах относительно друг друга.
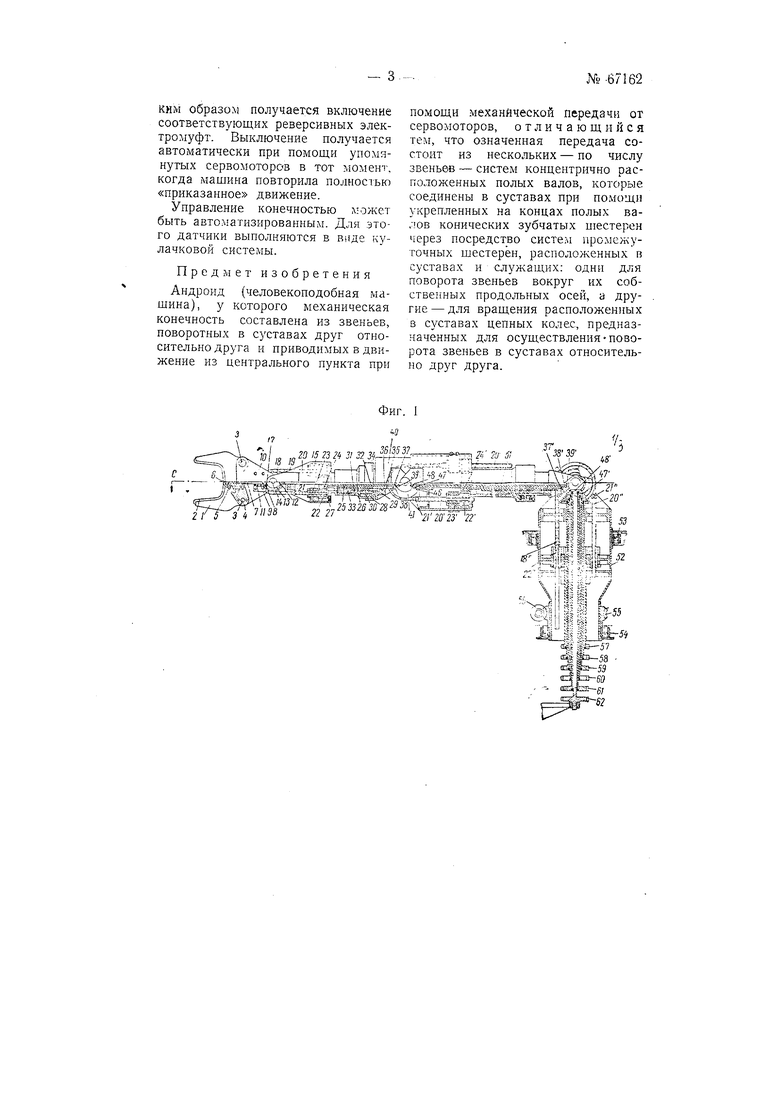
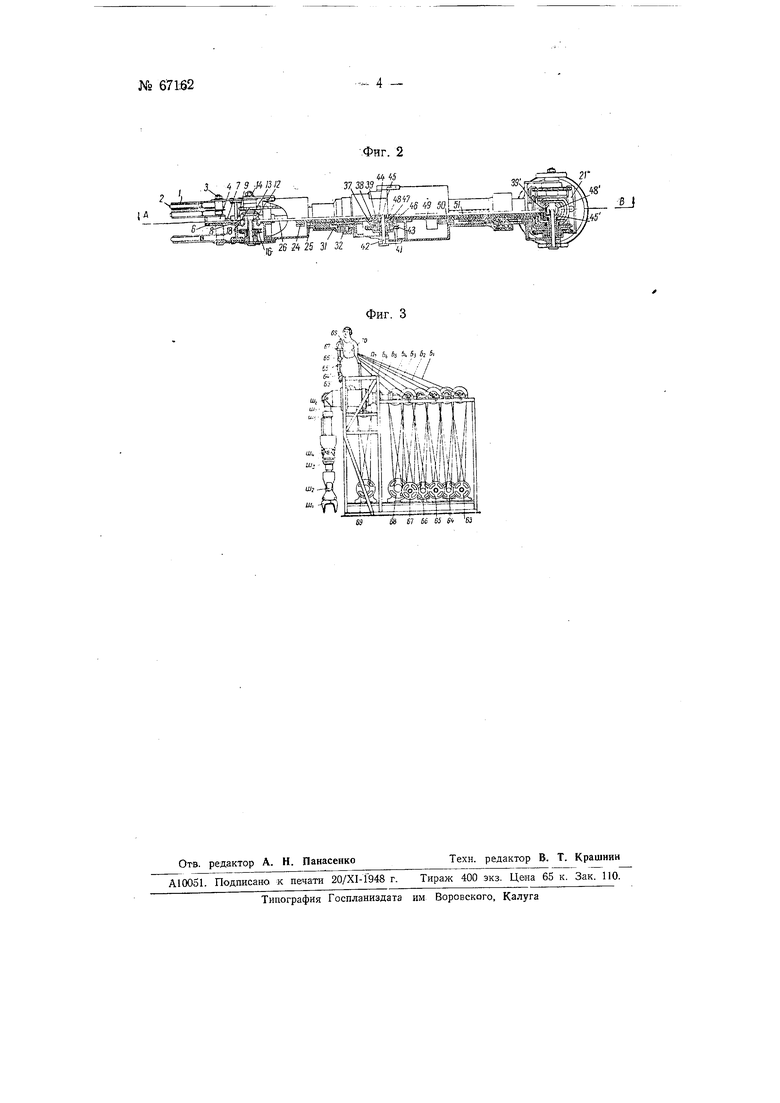
Фиг. I изображает разрез правой руки андроида по линии АВ фиг. 2; фиг. 2-разрез по линии СД фиг. 1;
фиг. 3-общий вид примерной формы использования руки андроида.
Пальцы руки андроида выполнены в виде щипцов. Рабочие части, т. е. клещни / гципцов, покрыты рези-ной 2 и вращаются вокруг осей 3, при повороте зубчатых секторов 4.
Эти секторы сцепляются с двойной рейкой 5, не имеющей свободы врапдения. Рейка имеет внутреннюю нарезку 6 по центральной оси, в которую ввинчивается винт 7, имеющий на другом конце коническую щестеренку 8 со втулкой 9.
Благодаря радиально упорному подшипнику, прикрепленному к плите 10, и кольцевому выступу // винта 7, этот последний может лишь вращаться относительно плиты 10.
Вращательное движение шестеренки 12 передается шестеренке 8 посредством шестерни 1.3, посал{енной на ось 14.
Плита 10 вместе со щипцами может вращаться относительно цилиндра 15 вокруг оси 14. Для получения этого движения, к цепному колесу 16, прикрепленному к плите 10, присоединены концы 17 цепей 18, как это видно из фиг. 1.
Другие коицы 19 цепей 18 ирисоединеиы к винтам 20 при иомощи траверс 21. Один из винтов 20 имеет правую, другой - левую нарезку и они лишены возможности вращаться относительно цилиндра 15, благодаря наличию иродольной шпонки. Передвижение этих винтов осуществляется иутем вращения щестеренок 22, снабженных резьбой. Эти шестеренки, помещенные в радиально упорных подшипниках 23, сцепляются с шестеренкой 24. Подшипники 23 прикреплены к цилиндру 15. Шестерни 24 насажены на полый вал 25. Через вал 25 ироходит концентрический ему вал 26, на котором иосажена щестеренка 12. К цилиндру 15 прикреплена крышка 27 с радиально упорным подшипником 28, который вращается вокруг полого вала 29 с кольцевым выступом 50. На внутренней цилиндрической части крышки 27, пониже подшипника 28, имеются нарезанные продольные пазы 5/. а на внутренней цилиндрической части детали 29 - крупная многозаходная резьба 32 с большим шагом. Деталь 33 имеет соответствующую пазам 31 и резьбе 32 обработанную поверхность и центральный канал с винтовой нарезкой, в который ввинчивается нарезанный полый вал 34. Вал 34 с кольцевым выступом 55 вращается в радиально упорном подшипнике 36 детали 29 и снабжен конической шестерней 37, посаженной на его конце. Кониче,ские шестерни 3S и 39 прикреплены к валам 25 и 26, проходящим через внутреннее отверстие полого вала 34.
Кожух 40 подшипника 36 несет цепные колеса 41. Ось 42 этих колес является осью сустава всего описанного звена. Вокруг нее вращаются тоже конические шестерни 43, 44, 45, передающие движение шестерен 46, 47, 48 шестерням 57, 38, 39,
Устройство сустава плеча андроида не отличается от описанного сустава предплечья, если не принимать во внимание его
размер и трехиолые валы 49, 50, 51, на которых насажены щестерни 46, 47, 48, передающие предплечью и щипцам рабочий момент. ЧислоГ5ые обозначения с одним штрихом обозначают детал.;, аналогичные только что описанным.
Для следующего звена андроида обозначения с двумя штрихами также соответствуют аналогичным уже описанным деталям. Вращение цилиндра 52, установленного на подщипниках 55 и 54, производится ири помощи червячного колеса 55, прикреплениого к цилиндру 52, и червяка 56 сервомотора. Из фиг. 1 и 3 видно, что любое двил ;ение звена, как вокруг собственной оси, так и в суставах относительно друг друга, может производиться вращением колес 57, 58. 59, 60, 61, 62, имеющих общую центральную ось.
Механическую конечность, например, руку можно заставить повторять все движения, которые выполняет управляющий ею человек.
Эиергию, необходимую для приведения конечности в движение, можно заимствовать из внеиших источников, например, от индивидуальных электродвигателей 63, 64, 65, 66, 67, 68, 69 (фиг. 3), по числу суставов конечности.
Каждый сустав имеет свой индивидуальный передаточный аппарат, заканчивающийся коническими шестернями, червячной передачей .и т. и. Направление каждого движения сустава и величина угла передвижения зависят от напраВоТения и величины движения соответствующих суставов человека, управляющего машиной.
Управление двил ением конечности осуществляется следуюпгим образом. Управляющий машиной человек 70 надевает на руку датчики импульсов, обозиаченные цифрами 63-69. Датчики соответствуют суставам Я/,-Я/у механической конечности. Каждое движение датчика вызывает передвижение контакторов сервомоторов в одном или другом направлении посредством тяг EI-Бб и не показанной на чертеже тяги 7 к контактору //у. ТаКИМ образов) получается включение соответствующих реверсивных электромуфт. Выключение получается автоматически при помощи упомянутых сервомоторов в тот момент, когда машина повторила полностью «приказанное движение.
Управление конечностью л;ожет быть автоматизированным. Для этого датчики выполняются в виде кулачковой системы.
Предмет изобретения
Андроид {человекоподобная машина), у которого механическая конечность составлена из звеньев, поворотных в суставах друг относительно друга и приводимых в движение из центрального пункта при
помощи механической передачи от сервомоторов, отличающийся тем, что означенная передача состоит из нескольких - по числу звеньев - систем концентрично расположенных полых валов, которые соединены в суставах при помощи укрепленных на концах полых валов конических зубчатых ншстерен через посредство систем промежуточных шестерён, расположенных в суставах и служащих: одни для поворота звеньев вокруг их собственных продольных осей, а другие - для вращения расположенных в суставах цепных колес, предназначенных для осуществления-поворота звеньев в суставах относительно друг друга.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для записи движений органов человека | 1938 |
|
SU57746A1 |
| Винтовой пресс | 1938 |
|
SU55105A1 |
| Смеситель д.и.турьяна | 1972 |
|
SU528941A1 |
| СУСТАВ РУКИ РОБОТА | 2013 |
|
RU2564799C2 |
| Механизм управления фидером для подачи стекломассы непрерывной сгрузи | 1933 |
|
SU34724A1 |
| Ограждение к рабочим машинам, приводимым в действие паровой машиной | 1930 |
|
SU23037A1 |
| Прибор для упражнения в стрельбе по морским целям | 1930 |
|
SU25074A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ВЕРТЛУЖНОЙ ВПАДИНЫ ПРИ ЭНДОПРОТЕЗИРОВАНИИ ТАЗОБЕДРЕННОГО СУСТАВА | 2014 |
|
RU2583578C1 |
| Цепная врубовая машина | 1928 |
|
SU30146A1 |
21
И . . 1 4 7 9;W 2I2 ,, г
fS A
w-F-A 4L S.fc.
ШИ
:,fiffl
- fi Ibf Фиг. 2
тйй
Жбй
