Область техники, к которой относится изобретение
Изобретение относится к области робототехники и может быть использовано при построении человекообразных (андроидных) роботов.
Уровень техники
Основной проблемой при конструировании руки человекообразного робота является обеспечение низкой стоимости, которая определяется технологичностью и сложностью конструкции. Фактически, только стоимость робота является причиной отсутствия человекообразных роботов в быту и на потребительском рынке, несмотря на огромное число экспериментально построенных образцов, стоимость которых колеблется от единиц до десятков миллионов рублей за один экземпляр (см., например, http://mindtrans.narod.ru/robots/robots.htm).
Сложность руки в значительной степени обусловлена ограничением на ее объем и форму, а также необходимостью применения понижающего редуктора, поскольку современные электродвигатели имеют наибольший к.п.д. только при высоких скоростях вращения. Все это приводит к высокой сложности конструкции, требующей неочевидных технических решений.
Для приведения сустава руки в движение используют электродвигатели, линейные актуаторы, шаговые двигатели, гидравлические и пневматические цилиндры. Для понижения скорости вращения вала используют редукторы на зубчатых колесах, винтовые и червячные передачи, волновые и планетарные редукторы, ременные передачи. Не все редукторы позволяют сохранять положение нагруженной руки при отключенном питании электродвигателей.
Известен сустав руки робота (патент US 20110048158 A1), использующий систему зубчатых колес для понижения скорости вращения вала электродвигателя, вращение через которые подается на вал, соединяющий плечо и предплечье руки робота. Недостатком устройства является сложность и большой занимаемый объем.
Известен также сустав руки (патент US 2010/0162846 A1), в котором для понижения скорости вращения использована винтовая пара, преобразующая вращательное движение вала двигателя в поступательное движение гайки, навинченной на винт, и затем через ременную передачу обратно во вращательное движение оси вращения сустава руки робота (см. Fig.3 в описании патента US 2010/0162846 A1). Недостатком устройства является большой занимаемый объем и наличие ременной передачи, склонной к проскальзыванию и требующей системы натяжения ремня для надежной работы.
Наиболее близким к предлагаемому устройству является структура руки робот, защищенная патентом US 6580970 B2 "Arm structure of human-type robot", от 17 июня 2003 г. Локтевой сустав руки (см. Fig.3 и Fig.4 в описании этого патента) состоит из плеча и предплечья, которые соединены двумя подшипниками, обеспечивающими свободное сгибание руки в локтевом суставе, а также волнового редуктора, входная ось которого соединена со шкивом, который вращается ремнем, соединенным со вторым шкивом, закрепленным на оси двигателя. Аналогичный конструктив использован в плече для вращения руки вокруг ее продольной оси.
Недостатком прототипа является его технологическая сложность, связанная с необходимостью изготовления кожуха руки методом литья алюминия под давлением, высокая сложность примененного (волнового) редуктора (имеющиеся в продаже волновые редукторы примерно в 5 раз дороже планетарных), а также отсутствие возможности сохранения положения согнутой руки при отключенном питании электродвигателя, поскольку возможна обратная передача вращения с выхода волнового редуктора на его вход и далее на вал электродвигателя.
Сущность изобретения
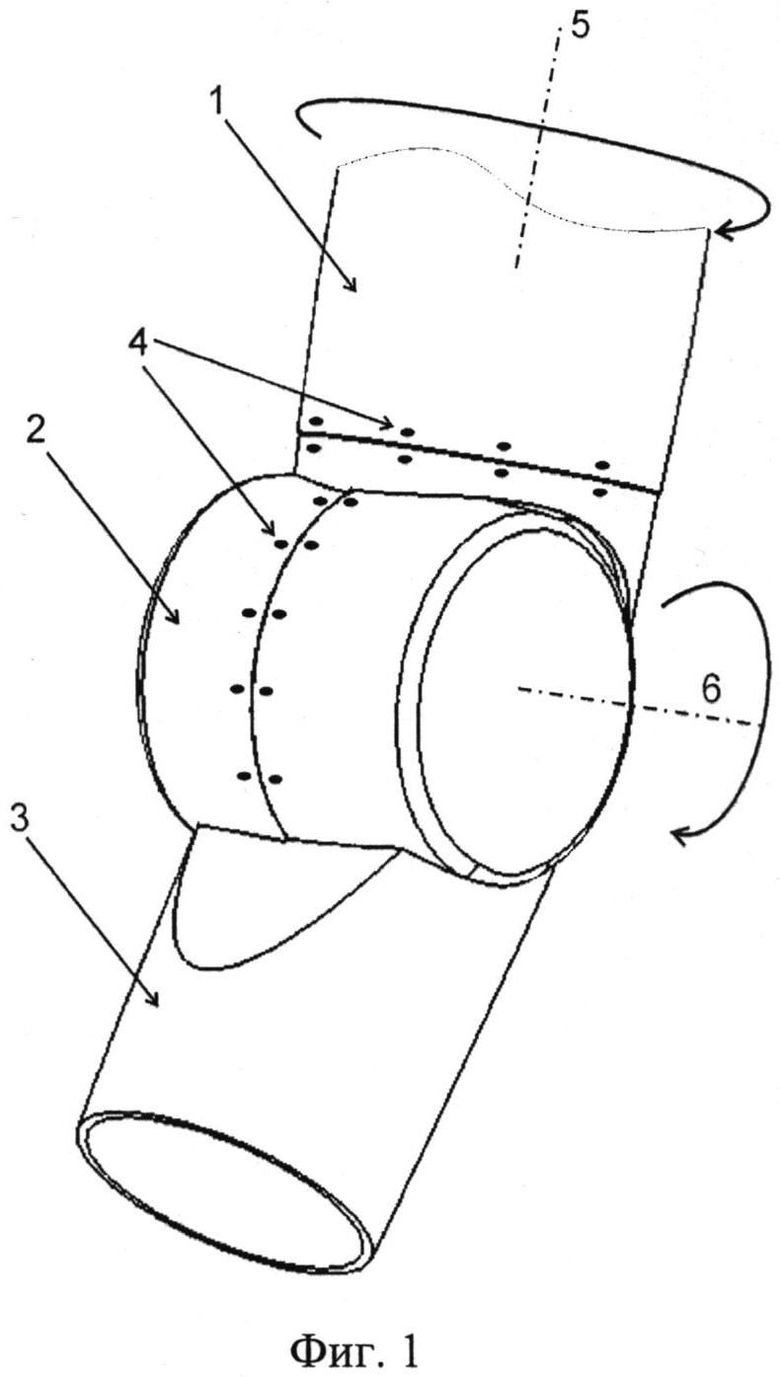
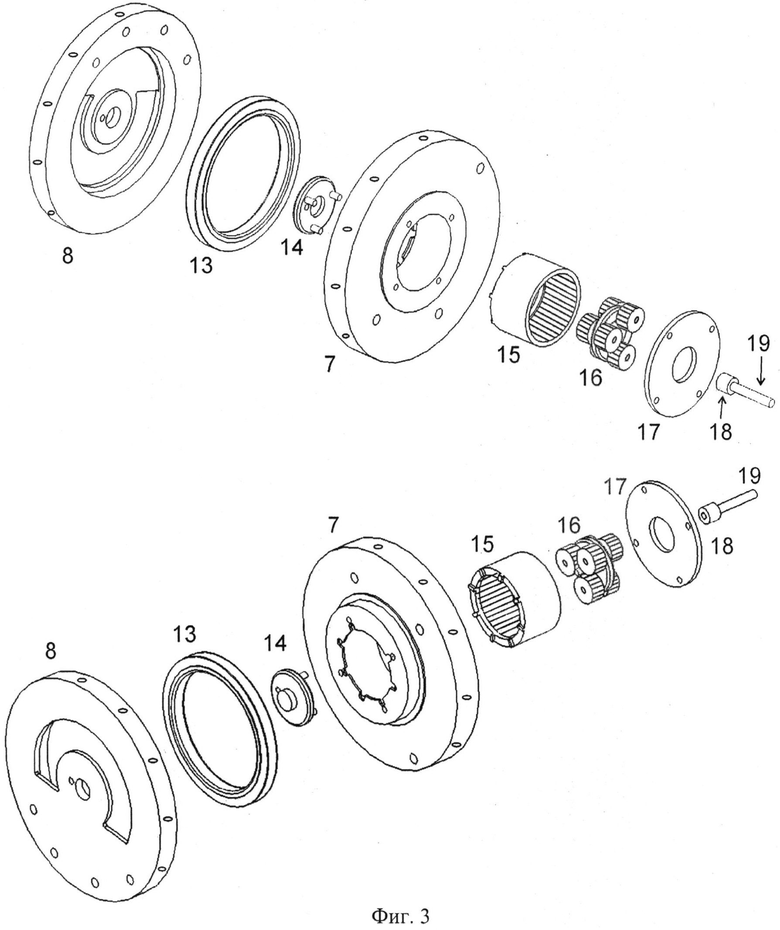
Основная часть сустава руки робота расположена внутри кожуха (фиг.1), состоящего из трех частей: кожуха плеча 1, кожуха предплечья 3 и кожуха локтя 2. Все части кожуха крепятся винтами 4 к дискам 7, 8, 9 и 10 на фиг.2. Сустав содержит узел вращения плеча 20 и узел сгибания в локте 21, которые полностью идентичны и состоят из (см. фиг.3 и фиг.4) первого диска узла вращения плеча 7 и второго диска узла вращения плеча 8, а также подшипника 13 и планетарного двухступенчатого редуктора, состоящего из коронной шестерни 15, блока сателлитных шестерен с водилом 16, второго водила 14 и солнечной шестерни 18. Первый 7 и второй 8 диски узла вращения плеча соединяются с помощью шарикоподшипника 13, закрепленного в них тугой посадкой. В полость первого диска узла вращения плеча 7 вставляется коронная шестерня 15, внутрь которой вставляется блок сателлитных шестерен с водилом 16, а второе водило 14 закрепляется на втором диске плеча 8. Коронная шестерня 15 неподвижно прижимается к основанию первого диска узла вращения плеча 7 с помощью пластины 17. Солнечная шестерня 18 насаживается тугой посадкой на входной вал 19 и вставляется в блок сателлитных шестерен 16. Идентично устроен узел сгибания в локте 21 на фиг.2. К первому диску узла вращения плеча 7 прикреплен шаговый двигатель 12 (см. фиг.2), а к первому диску узла сгибания в локте 9 - двигатель с червячным редуктором 11. Второй диск узла вращения плеча 8 соединен со вторым диском 10 узла сгибания в локте 21 с помощью уголка 11.
Техническим результатом предлагаемого изобретения является уменьшение сложности устройства, увеличение компактности и обеспечение сохранения положения руки при отключении питания двигателей.
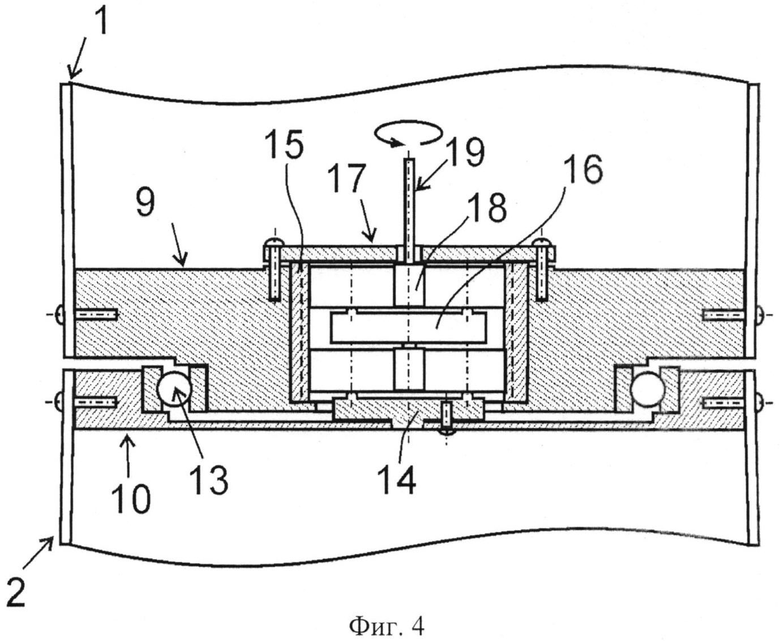
Уменьшение сложности и увеличение компактности достигается тем, что в предлагаемом устройстве вместо двух подшипников, закрепленных с двух сторон оси сгибания в локте относительно плеча (как у прототипа), использован только один подшипник 13 (фиг.3 и фиг.4). Подшипник выбран достаточно большим, чтобы он мог выдержать не только радиальную, по и продольную нагрузку. Кроме того, вместо волнового редуктора использован более простой планетарный двухступенчатый редуктор. Возможность закрепления кожуха непосредственно на дисках 10 и 9, а также на дисках 7 и 8 упрощает его конфигурацию и поэтому позволяет использовать технологически более простой и дешевый способ формования кожуха методом штамповки алюминия или горячей формовки пластмассового листа, исключение второго подшипника делает предлагаемый конструктив более компактным по сравнению с прототипом, что позволяет использовать освободившееся пространство внутри кожуха руки для размещения двигателей и драйверов большей, чем у прототипа, мощности.
Для обеспечения сохранения положения руки после отключения питания применен двигатель с червячным редуктором 11 (фиг.2).
Перечень фигур чертежей и иных материалов
Фиг.1 - кожух локтевого сустава. Здесь 1 - кожух плеча; 2 - кожух локтя; 3 - кожух предплечья; 4 - винты; 5 - ось вращения плеча; 6 - ось изгибания руки в локте.
Фиг.2 - детали внутри кожуха, показанного на фиг 1. Здесь 7 - первый диск узла вращения плеча; 8 - второй диск узла вращения плеча; 9 - первый диск узла сгибания в локте, 10 - второй диск узла сгибания в локте; 11 - двигатель с редуктором; 12 - шаговый двигатель; 20 - узел вращения плеча; 21 - узел изгибания в локте.
Фиг.3 - состав деталей узла вращения плеча и узла сгибания в локте. Здесь 13 - шарикоподшипник; 14 - второе водило; 15 - коронная шестерня; 16 - блок сателлитных шестерен с водилом; 17 - пластина; 18 - солнечная шестерня; 19 - входной вал.
Фиг.4 - поперечный разрез узла вращения плеча и узла сгибания в локте. Здесь 1 - кожух плеча; 2 - кожух локтя; 13 - шарикоподшипник; 14 - второе водило; 15 - коронная шестерня; 16 - блок сателлитных шестерен с водилом; 17 - пластина; 18 - солнечная шестерня; 19 - входной вал.
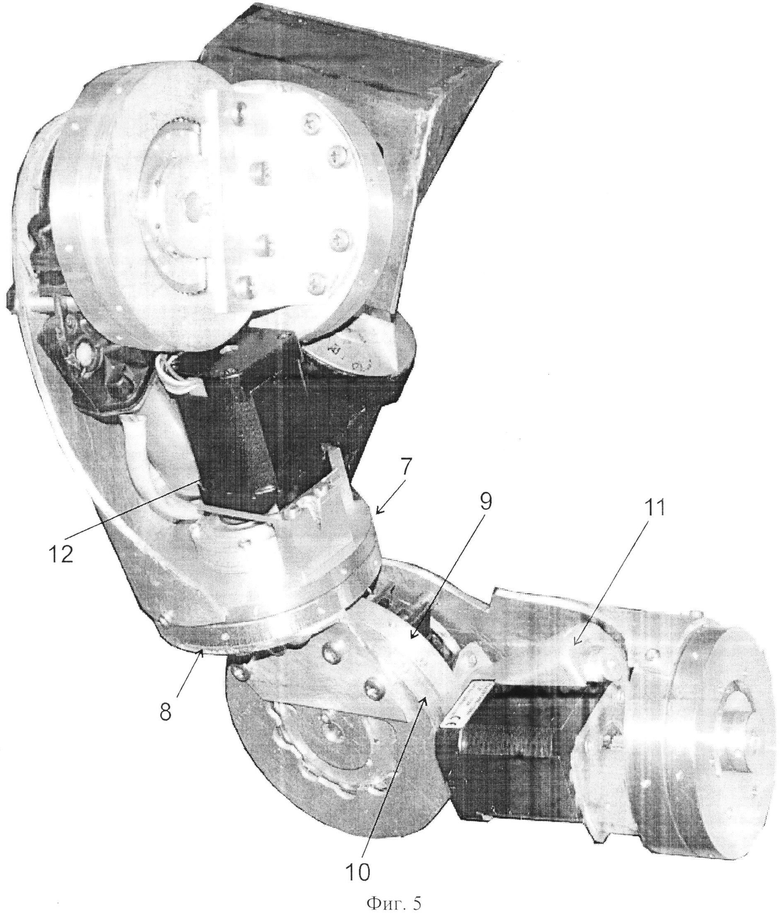
Фиг.5 - фотография руки робота. Здесь 7 - первый диск узла вращения плеча; 8 - второй диск узла вращения плеча; 9 - первый диск узла сгибания в локте; 10 - второй диск узла сгибания в локте; 11 - двигатель с редуктором; 12 - шаговый двигатель.
Сведения, подтверждающие возможность осуществления изобретения
Осуществляется изобретение в соответствии с описанием в разделе "Сущность изобретения", порядок сборки основных узлов устройства иллюстрируется фиг.3. Макет руки, собранный для проверки работоспособности устройства, показан на фиг.5. Детали макета устройства изготовлены из дюралюминия, однако возможно применение пластмассовых деталей.
Работает рука следующим образом. При подаче сигналов на обмотки шагового двигателя 12 (фиг.2) его ось начинает вращаться и передает вращательное движение на входной вал 19 (фиг.3), который вращает шестеренку 18, которая передает движение блоку сателлитных шестерен с водилом 16, которые передают движение второму водилу 14, которое жестко закреплено на диске 8, что обеспечивает передачу и двухступенчатую редукцию вращательного движения от входного вала 19 диску 8. Поскольку шаговый двигатель 12 жестко закреплен на первом диске плеча 7, то выполняется вращение кожуха локтя относительно кожуха плеча вокруг оси 5 на фиг.1. Аналогично, при подаче питания на двигатель с червячным редуктором 11 вращение его вала передается на диск 10, который вращается относительно диска 9, что обеспечивает изгиб руки в локтевом суставе, т.е. вращение кожуха предплечья 3 вокруг оси 6 на фиг.1.
Благодаря тому, что использован двигатель с червячным редуктором 11 (фиг.2) при отключении питания двигателя, нагруженная рука остается в том же положении, в котором она была в момент отключения питания, поскольку вращение с выхода червячного редуктора на его вход практически не передается.
Конструкция реализованного нами прототипа руки робота (фиг.5) чрезвычайно проста, и ее себестоимость получается примерно в 10 раз ниже, чем у прототипа или аналогов.
По мнению автора, сущность заявляемого изобретения не следует для специалиста явным образом из известного уровня техники, поскольку прямое решение задачи, широко используемое в аналогичных соединениях, состоит в применении оси с двумя подшипниками на ее концах. Применение одного подшипника для реализации подвижного сустава в робототехнике ранее не использовалось и поэтому не может считаться известным из уровня техники.
Предложенная конструкция руки робота очень технологична, и в настоящий момент готовится технологическая оснастка для ее серийного производства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Редуктор с эпициклоидной передачей, вентиляторный модуль двухконтурного турбореактивного двигателя и двухконтурный турбореактивный двигатель | 2013 |
|
RU2627990C2 |
| СМАЗКА И ОХЛАЖДЕНИЕ РЕДУКТОРА С ЭПИЦИКЛОИДАЛЬНОЙ ЗУБЧАТОЙ ПЕРЕДАЧЕЙ | 2010 |
|
RU2519305C2 |
| УСОВЕРШЕНСТВОВАННЫЙ ТРЕНАЖЕР | 2012 |
|
RU2606944C2 |
| Роботизированное устройство тренажера для реабилитации конечностей и способ его применения | 2021 |
|
RU2766754C1 |
| Тренажер с биологической обратной связью для реабилитации суставов и мышц кистей и пальцев рук | 2020 |
|
RU2735986C1 |
| Манипулятор | 1973 |
|
SU488388A3 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Мотор-колесо транспортного средства | 1980 |
|
SU867706A1 |
| Бесшатунный двигатель | 2024 |
|
RU2837422C1 |
| Устройство для разработки подвижности плечевого сустава | 2017 |
|
RU2653811C1 |
Изобретение относится к области робототехники и может быть использовано при разработке человекоподобных роботов. Сустав руки робота содержит кожух плеча, кожух предплечья, кожух локтя, идентичные узел вращения плеча и узел сгибания в локте, которые состоят из первого и второго дисков, шарикоподшипника и планетарного двухступенчатого редуктора, состоящего из коронной шестерни, блока сателлитных шестерен с водилом, второго водила и солнечной шестерни. К первому диску узла вращения плеча прикреплен шаговый двигатель, ось которого соединена с входным валом узла вращения плеча, а к первому диску узла сгибания в локте прикреплен двигатель с червячным редуктором, ось которого соединена с входным валом узла сгибания в локте. Изобретение обеспечивает упрощение конструкции, увеличение компактности и обеспечение сохранения положения руки при отключении питания двигателей. 5 ил.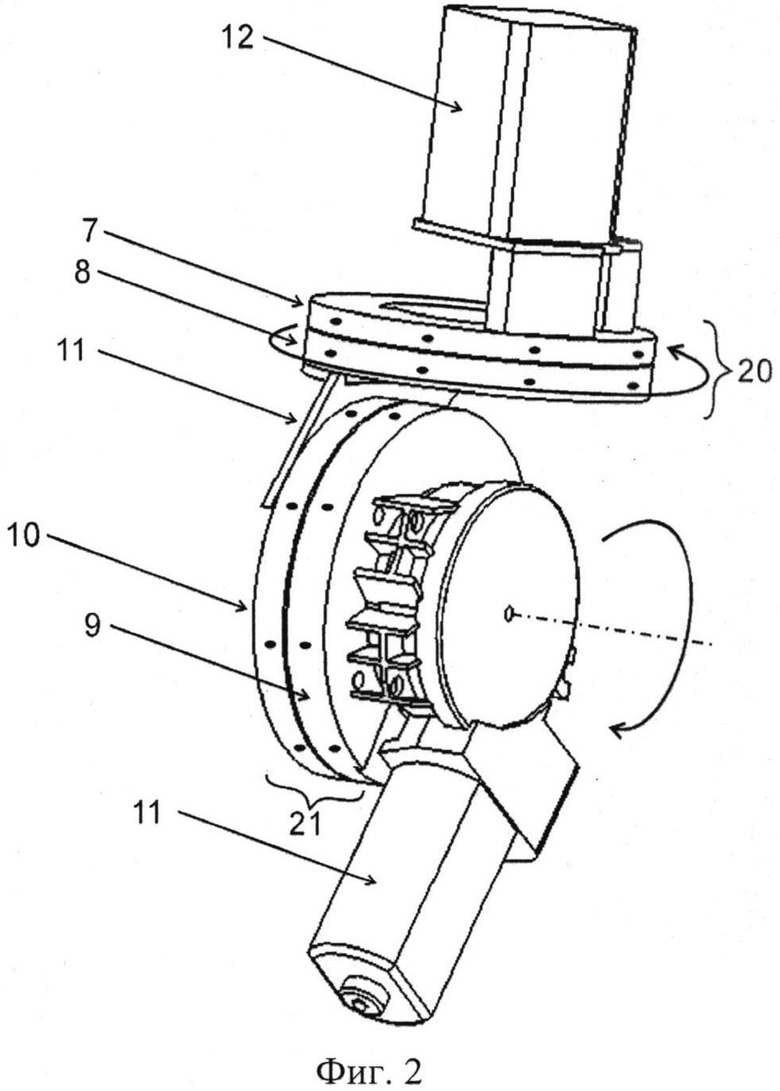
Сустав руки робота, содержащий кожух плеча, кожух предплечья, кожух локтя и шарикоподшипники, отличающийся тем, что он содержит идентичные узлы вращения плеча и сгибания в локте, которые состоят из первого и второго дисков, шарикоподшипника и планетарного двухступенчатого редуктора, состоящего из коронной шестерни, блока сателлитных шестерен с водилом, второго водила и солнечной шестерни, при этом первый и второй диски соединены с помощью упомянутого шарикоподшипника, закрепленного в них тугой посадкой, в полость первого диска узла вращения плеча вставлена коронная шестерня, внутрь которой вставлен блок сателлитных шестерен с водилом, а второе водило закреплено на втором диске узла вращения плеча, коронная шестерня неподвижно прижата к основанию первого диска плеча с помощью пластины, солнечная шестерня насажена тугой посадкой на входной вал и вставлена между сателлитными шестернями, причем к первому диску узла вращения плеча прикреплен шаговый двигатель, ось которого соединена с входным валом узла вращения плеча, а к первому диску узла сгибания в локте прикреплен двигатель с червячным редуктором, ось которого соединена с входным валом узла сгибания в локте, второй диск узла вращения плеча соединен со вторым диском узла сгибания в локте с помощью уголка, при этом кожух плеча прикреплен к первому диску узла вращения плеча, кожух локтя прикреплен ко второму диску узла вращения плеча и второму диску узла вращения предплечья, а кожух предплечья прикреплен к первому диску узла вращения предплечья.
| US 6580970 B2, 17.06.2003 | |||
| US 8459139 B2, 11.06.2013 | |||
| FR 2929875 A1, 16.10.2009 | |||
| Манипуляционное устройство | 1981 |
|
SU988544A1 |
| Очувствленный кистевой сустав робота | 1985 |
|
SU1569233A1 |
| Рука манипулятора | 1982 |
|
SU1042989A1 |

