jplfо о si со
35
Изобретение относится к машиностроению и может быть использовано при создании промышленных роботов. Известна рука промышленного робота 4 Универсал-15, содержащая корпус руки, охват, кисть, привод, выполненный в виде четырех конических дифференциалов и трех двигателей, с вя ванных между собой зубчатыми колесами, и связанный с кистью четырьмя телескопическими валами.
Данная рука имеет кинематическую развязку между движениями схвата и кисти, а также в ней обеспечена беззазорная передача движений (1 . Недостатками указанной руки являются сложная конструкция с большим .количеством высокоточных -элементов, трудоемких в изготовлении, и большая трудоемкость сборочнопригоночных работ.
Известна также рука промышленного робота, содержащая корпус, связанный с кистью цилиндрическими направляющими, механизм разделения движений, включающий дифференциалы, три привода механизма ориентации захвата, привод выдвижения руки и три телескопические вала, на ко. которых установлен механизм ориентёг ции захвата 2J .
Недостатком данной руки является наличие цепнойпередачи, что приводит к ухудшению точности позиционирвания схвата за счет вытягивания цепи. Для предотвращения падения точности позиционирования необходимо периодически проверять натяжение цепи и при надобности производить е натяжение, а если учесть, что таких цепей три, то подобная процедура ухудшает удобство эксплуатации руки Цель изобретения - повышение точности позиционирования за счет уменшения зазоров в кинематических цепях и уменьшения кинематических элементов.
. Указанная цель достигается тем, что рука манипулятора, содержащая корпус, механизмы вращения и качания схвата, вращения кисти и выдвижения руки, включакадие каждый силовой цилиндр и кинематические цепи, снабжена цилиндрическими кулачксии1И с винтовыми канавками, установленными, в кинематических цепях механизмов вращения схвата и кисти, и направляющими качения, установленными в корпусе руки и связанными с силовыми цилиндром механизма вращения схвата:, причем корпус силового цилиндра механизма вращения схвата жестко связан со IUTOKOM силового цилиндра вращения кисти, а винтовые канавки цилиндрических кулачков нарезаны в одном направлении с одинаковым шагом.
На чертеже представлена кинематическая схема руки манипулятора.
Рука манипулятора содержит корпус 1, в котором на радиально упорных подшипниках 2 сидят цилиндрические кулачки 3 и 4, жестко связанные с цилиндpичecки и зубчаты-г ми колесами 5 и б, которые взаимодействуют с двойной рейкой 7, связанной со штоком 8 гидроцилиндра качания схвата 9, жестко связанного с корпусом 1. Цилиндрические кулачки 3 и 4 при помощи винтовых канавок 10 и 11 и подшипников 12 связаны с водилами 13, которые через шаровые подшипники 14 и коромысло 15 соединены со штоком 16 гидроцилиндра вращения схвата 17. Водила 13 жестко соединены с шариковыми муфтами 18 крутящего момента и при помощи последних связаны с четырехгранными валами 19 и 20, которые при помощи шариковых муфт 21, сидящих в подшипниках 22, базируются в корпусе руки и при помощи подшипников 23 базируются в-корпусе кисти 24. Гидроцилиндр вращен схвата 17 базируется в направляющих 25 качения, сидящих в корпусе руки. Корпус гидроцилиндра вращени схвата 17 жестко связан с полым штком 26 гидроцилиндра вращения кисти 27, жестко закрепленного на корпусе 1 руки. Шток 26 через шаровой подшипник 28 соединен с водилом 29 с которым жестко связана муфта 30 передачи крутящего момента и которое при пбмощи подшипников 31 контактирует с винтовыми канавками 32 цилиндрического кулачка 33, жестко закрепленного в корпусе 1 руки.
Водило 29 при помощи муфты 30 передачи крутящего момента связано с четырехгранным валом 34, который . при помощи шариковой муфты 3S, сидящей в подшипнике 36,базируется в корпусе 1 руки и при помощи подшипника 37 - в корпусе кисти 24.
На силовом цилиндре привода схвата 38 жестко закреплена выходная шестерня 39 дифференциала, которая находится в зацеплении о коническими секторами 40 и 41, получающими движение при помощи конических зубчатых секторов 4-2 и 43, конических зубчатых колес 44 и 45 и цилиндрических зубчатых пар 46 и 47 от четырехграиинх валов 19 и 20.
На конце четырехгранного вала 20 естко закреплена цилиндрическая шестерня 48, находящаяся в зацеплении с цилиндрическим колесом
49,жестко закрепленным на обойме
50,сидящей на подшипниках 51 в корпусе кисти 24. В обойме 50 на подшипниках 52 сидят конические
сектора 40 - 43. К силовому цилиндру 38 привода охвата крепится схват 53.
Корпус кисти 24 крепится на торец каретки 54,, которая сидит в корпу се 1 руки на роликовых направляющих 55. На корпусе 1 руки закреплен гидроцилиндр 56, шток 57 которого крепится к корпусу 24 кисти.
Рука манипулятора работает следуняцим образом.
Вращение схвата. Энергоноситель поступает в бесштоковую полость гидррцилиндра вращения схвата 17, при этом шток 16 перемещается влево и двигает коромысло 15, которое через шаровые подшипники 14 двигает водила 13., Водила 13, отслежив ая подшипниками 12 .винтовые канавки 10 и 11 цилиндрических кулачков 3 и 4, совершают винтовое .да11йение, причем направления движения у обоих водил 13 совпадают, так как винтовые канавки 10 и 11 имеют вяинаковое направление нарезки у кулачков 3 и 4.
В это время двойная рейка 7 благодаря гидроцилиндру качания- схвата 9 не движется и при помощи зубчатых колес 5 и 6 препятствует вра-т щёнию кулачков 3 и 4, а корпус гидроцилиндра качания схвата 9, базирующийся в направляющих 25 качения, сидящих в корпусе 1 руки за счет жесткой связи .с полым штоком 26 гидроцилиндра качания кисти 27, стоит на месте, так как не двигается шток 26. А так как с водилами 13 жестко соединена шариковые муфты 18 крутящего момента, то они совершают два движения: поступательное, перемещаясь по четырехгранным валам 19 и 20, и вращательное - вокруг осей, кулачков 3 и 4..Вращаясь, муфты 18 . передают вращение валам 19 и 20, причем вращение происходит в одну сторону. Далее движение через зуб- чатые пары 47 и 46, конические колеса 44 и 45 и конические сектора 40 43 передается выходной шестерне 39 дифференциала, котооая начинает вращаться и вращает силовой цилиндр 38 и охват 53 вокруг оси I. Для изменений направления вращения схвата энергоноситель поступает в штоковую полость гидроцилиндра вращения схвата 17. )-
Качание схвата. Энергоноситель
поступает в бесштоковую полость гидроцилиндра качания схвата 9. Шток 8 перемещается влево и перемещает двойную рейку 7, которая за счет сцепления с зубчатьоог колесами 5 и 6 вращает кулачки 3 и 4 в противоположных направлениях, которые при помсяци винтовых канавок 10 и 11 и подшипи иков 12 вращают водила 13 и шариковые муфты 18 в противоположных направлениях, а так как коромысло 15, шток 16 и гидроци}1индр вращения схвата 17 стоят на месте, -при . этом внутреннее кольцо шарового подшипника 14 вращается, а наружное неподвижно, то шариковые муфты 1В,
водила 13 и подшипники 12 представляют как бй одно целое с кулачками 3 и 4, в результате четырехгранные валы 19 и 20 получают вращение в противоположные направления. Движение от валов 19 и 20 через зубчатые пары 47 и 46 и конические колеса 44 и 45 передаётся коническим секторам 40-43, которые начинают вращаться в одном направлении и вращают шестерню 39, силовой цилиндр привода схвата 38 и схват 53 вокруг оси .е. происходит качание схвата 9..
Для изменение направления качания схвата энергоноситель поступает
в штоковую полость гидроцилиндра качания схвата 9.
Вращение кисти. Энергоноситель . поступает в правую што.ковую полость гидроцилиндра .вращения кист-и 27. По
лый шток 26 перемещается влево и через шаровой подшипник 28 толкает водило 29, которое,отслеживая подшипниками 31 винтовые канавки 32, совершает винтовое движение, при этом
наружное кольцо шарового подшипника 28 совершает поступательное движение, а внутреннее кольцо, связанное с водилом 29 - поступательное и вращательное движения. Шариковая муфта
30 передачи крутящего момента жестко связана с водилом 29 и совершает два движения: поступательное, перемещаясь вдоль четырехгранного вала 34, и вращательное - вокруг оси кулач- .
ка 33.
Вращаясь, муфта 30 вращает четырехгранный вал 34 с закрепленной на его конце цилиндрической шестерней 48, которая приводит во вращение цилиндрическое колесо 49 и обойму 50 ,л вокруг оси Ш;Т.е. происходит вращение кисти. Для тога, чтобы при вращении кисти не происходили качание и вращение схвата, валы 19 и 20 должны вращаться в том же направлении, что и вал 34. Для этого
у кулачка 33 винтовые канавки 10, Ц 1Г32 нарезаны на наружной поверхности в одном направлении с одинаковым шагом, а полый шток 26 гидроцилиндра вращения кисти 27 жестко связан с гидроцилиндром вращения схвата 17. При поступательном перемещении штока 26 гидроцилиндр вращения схвата 17 также начинает поступательно перемещаться в направляющих 25 качения. Шток 16 давит на коромысло 15 и через подшипники 14 на водила 13, которые совершают винтовое движение и при помощи шариковых муфт 18 вращают вгипы 19 и 20 в направлении вращения вала 34. При этом энергоноситель в гидроцй лидр вращения охвата 17 не поступает и не выходит, т.е. положение, штока 16 относительно корпуса гидроцилиндра вращения схвата 17 не меняется, а кулачки 3 и 4, зубчатые колеса 5 и б и двойная рейка 7 не совершают никакого движения, т.е. происходит работа механизма, аналогичная работе при вращении схвата. Для изменения вращения кисти .энергоноситель поступает в левую штокову полость гидроцилиндра вращения кисти. Выдвижение кисти. Энергоноситель поступает в бесштоковую полост гидроцилиндра 56. Шток 57, связанны с корпусом 24 кисти, перемещается влево и перемещает кисть, закреплен ную на торце каретки 54, и йаретку 54 по роликовым направляющим 55. Ва лы 19,20 и 34 при выдвижении кисти движутся поступательно в шй1риковых муфтах 21 и 35, которые при помощи подшипников 22 и 36 закреплены в ко пусе 1 руки. Валы 19, 20 и 34 вращаются вмест с шариковыми муфтами 21 и 35 в подшипниках 22 и 36. При изменении нап равления выдвижения энергоноситель поступает в штоковуго полость гидроцилиндра 56. Применение предлагаемой руки манипулятора по сравнению с известной позволяет повысить удобство процесса обучения и сократить время на обучени9 робота по заданной программе, за счет создания конструкции руки, обеспечивающей независимые движения схвата и кисти, т#е. при отработке движения по одной ориентирующей степени подвижности, другие ориентирующие степени подвижности не приходят в движение, а также уменьшить вре-г мя простоя обслуживаемого роботом Оборудования.Кроме того,изобретение позволяет сократить расход энергоносителя, так как не требуется в ручном и автоматическом режимах при отработке движений вращения кисти и качания схвата приводить в движение степени подвижности качание и .вращение схвата,увеличить срок службы руки за счет исключенияработы приводов степеней подвижностей качания и вращения схваТа назад при работе подвижности вращения кисти и качания схвата, а также повысить удобство эксплуатации руки за счет ликвидации цепных передач.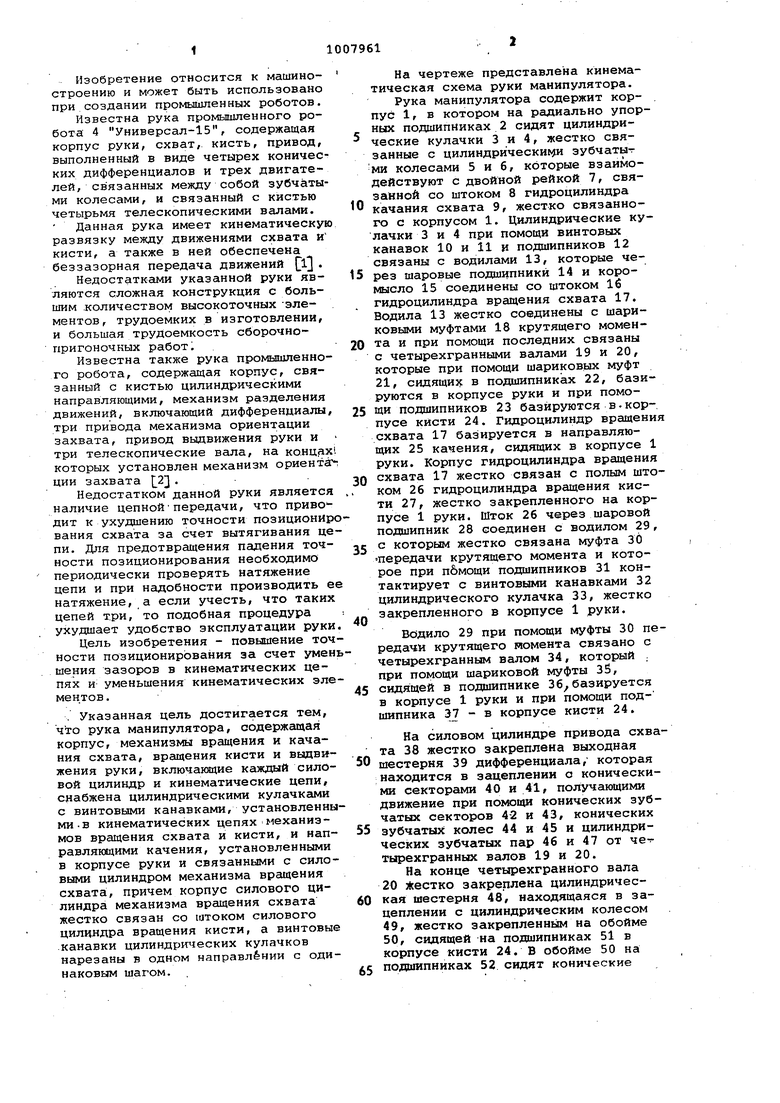


| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1981 |
|
SU973348A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Кисть манипулятора | 1981 |
|
SU973347A1 |
| Манипулятор | 1979 |
|
SU814719A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| СХВАТ РОБОТА | 1991 |
|
RU2022780C1 |
| Кисть промышленного робота | 1977 |
|
SU621572A1 |
| Рука манипулятора /ее варианты/ | 1983 |
|
SU1199608A1 |
| Рулевое управление трактора | 1984 |
|
SU1221002A1 |

РУКА МАНИПУЛЯТОРА, содержащая корпус, механизмы вращения и качания схвата, вращения кисти и выдвижения руки, включгшцие каждый силовой цилиндр и кинематические цепи, отличающаяся тем,чт( с целью повышения точности позиционирования, она снабжена цилиндрическими кулачками с винтовыми канавками, установленными в кинемчг тических цепях механиэкюв вращения схвата и кисти, и направлякщимй качения, установленными в корпусе руки и связанными с силовым цилиндром механизма вращения схвата, причем корпус силового цилиндра механизма вращения схвата жестко связан со штоком силового цилиндра вращения кисти, а винтовые канавки цилиндрических кулачков нарезаны в одном нап $авлении с одинаковым шагом.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Дифференциаль- ные механизмы манипуляторов | |||
| - Станки и инструмент, Машиностроение, 1978, 7, с | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Новые разработки в области лромьаштенньгзс роботов | |||
| Под ред | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Счетная бухгалтерская линейка | 1922 |
|
SU386A1 |
| р | |||
