1
Изобретение относится к машиностроению, в частности к станкостроению, и может быть использовано в механизмах для осуществления поступательного движения рабочих органов станков.
Известен привод поступательного движения, содержащий корпус, двигатель, подвижный орган и соединяющую их кинематическую цепь с. двумя винтовыми передачами, самотормозящей и несамотормозящей, и звено настройки. Ц).
Известный привод поступательного движения не обладает достаточной долговечностью в связи с большими потерями на трение в кинематической цепи передачи мощности, причем зти потери пропорциональны величине замедления и передаваемой мощности.
Целью изобретения является повышение срока службы привода поступательного движения, а также снижение потерь на трение.
Для зтого в предлагаемом приводе винтовые передачи установлены последовательно, а звено настройки расположено между винтовыми передачами, ведомый элемент несамотормозящей переНачи соединен с подвижным органом через
.упорный подшипник, а гайка самотормозящей передачи установлена на корпусе. Такое кинематическое соеддшение .вйгговых передач обеспечивает разветвление передаваемой к подвижному органу мощности: по короткой кт ематической цепи с мишшальными потерями и по длшшой кинематической цепи с присущими ей потерями.
. Соотношение мощностей, передаваемых по длинной и по короткой кинематическим цепям, принципиально может быть любым и определяется, главным образом, параметрами несамотормозящей винтовой передачи.
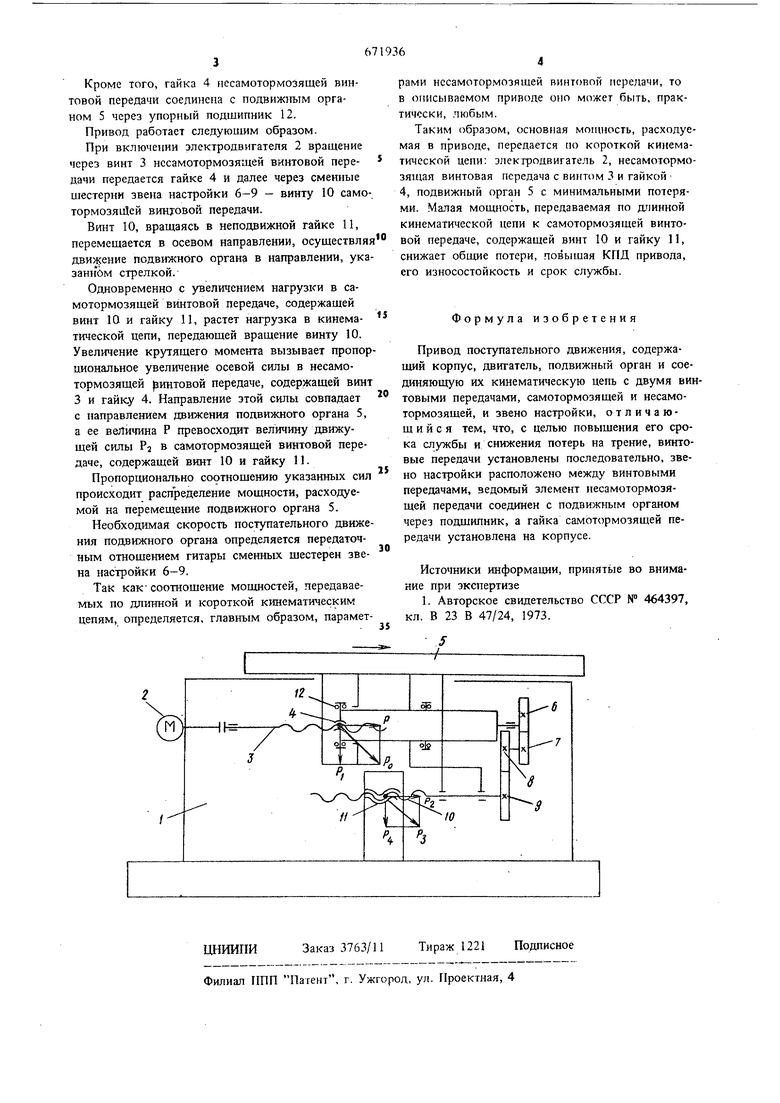
На чертеже изображена кинематическая схема привода поступательного движения. Привод поступательного движения содержит корпус 1, электродвигатель 2, ротор которого через жестко соединенный с ним винт 3 связан с гайкой 4 несамотормозящей винтовой передачи, и подвижный орган 5.
Гайка 4 посредством сменных щестерен звена настройки 6-9, связана с винтом 10 сгмоторМозящей винтовой передачи, гайка 11 которой установлена на корпусе 1. Кроме того, гайка 4 несамотормозящей винтовой передачи соединена с подвижным органом 5 через упорный подшипник 12. Привод работает следующим образом. При включении электродвигателя 2 вращение через винт 3 несамотормозящей винтовой передачи передается гайке 4 и далее через сменные шестерни звена настройки 6-9 - винту 10 самотормозяи1ей винтовой передачи. Винт 10, вращаясь в неподвижной гайке 11, перемещается в осевом направлении, осуществля подвижного органа в направлении, ука заннЪм стрелкой. Одновременно с увеличением нагрузки в самотормозящей винтовой передаче, содержащей винт 10 и гайку 11, растет нагрузка в кинематической цепи, передающей вращение винту 10. Увеличение крутящего момента вызывает пропор циональное увеличение осевой силы в несамотормозящей ринтовой передаче, содержащей винт 3 и гайку 4. Направление этой силы совпадает с направлением движения подвижного органа 5, а ее величина Р превосходит величину движущей силы РЗ в самотормозящей винтовой передаче, содержащей винт 10 и гайку 11. Пропорционально соотнощению указанных сил происходит распределение мощности, расходуемой на перемещение подвижного органа 5. Необходимая скорость поступательного движе ния подвижного органа определяется передаточным отнощением гитары сменных шестерен звена настройки 6-9. Так как- соотнощение мощностей, передаваемых по длинной и короткой кинематическим цепям, определяется, главным образом, парамет ами несамотормозяшей винтовой передачи, то описываемом приводе оно может быть, пракически, любым. Таким образом, основная мощность, расходуемая в приводе, передается по короткой кинематической цепи: электродвигатель 2, несамотормозящая винтовая передача с винтом 3 и гайкой 4, подвижный орган 5 с минимальными потерями. Малая мощность, передаваемая по длинной кинематической цепи к самотормозящей винтовой передаче, содержащей винт 10 и гайку 11, снижает общие потери, повыщая КПД привода, его износостойкость и срок службы. Формула изобретения Привод поступательного движения, содержащий корпус, двигатель, подвижный орган и соединяющую их кинематическую цепь с двумя винтовыми передачами, самотормозящей и несамотормозящей, и звено настройки, отличающийся тем, что, с целью повыщения его срока службы и снижения потерь на трение, винтовые передачи установлены последовательно, звено настройки расположено между винтовыми передачами, ведомый элемент несамотормозящей передачи соединен с подвижным органом через подщипник, а гайка самотормозящей передачи установлена на корпусе. Источники информации, принять1е во внимание при экспертизе 1. Авторское свидетельство СССР № 464397, кл. В 23 В 47/24, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод поступательного движения | 1976 |
|
SU665999A1 |
| Винтовой пресс | 1976 |
|
SU616154A1 |
| Привод станка | 1980 |
|
SU1096070A1 |
| Исполнительный орган технологического ротора | 1986 |
|
SU1349967A1 |
| ПРИВОД ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 1972 |
|
SU360193A1 |
| Винтовой пресс для штамповки с кручением | 1981 |
|
SU1000288A1 |
| Механический усилитель мощности | 1986 |
|
SU1425385A1 |
| Привод подвижного органа металлорежущего станка | 1988 |
|
SU1627771A2 |
| Самонастраивающийся амортизатор | 2018 |
|
RU2696150C1 |
| Рыхлитель | 1985 |
|
SU1397597A1 |
-
//
Ру-10
