Изобретение относится к области станкостроения.
Известные приводы поступательного движения, например подачи, в металлорежущих станках, сложны по конструкции и в эксплуатации.
В предлагаемом приводе управляющая и силовая кинематические цепи установлены параллельно, заканчиваются винтовыми парами с общим винтом, образующими в цепи управления самотормозящуюся передачу, а в силовой цепи несамотормозящуюся передачу, связанную с приводом через муфту скольжения.
Муфта скольжения, установленная в силовом приводе, регулируется по технологической нагрузке.
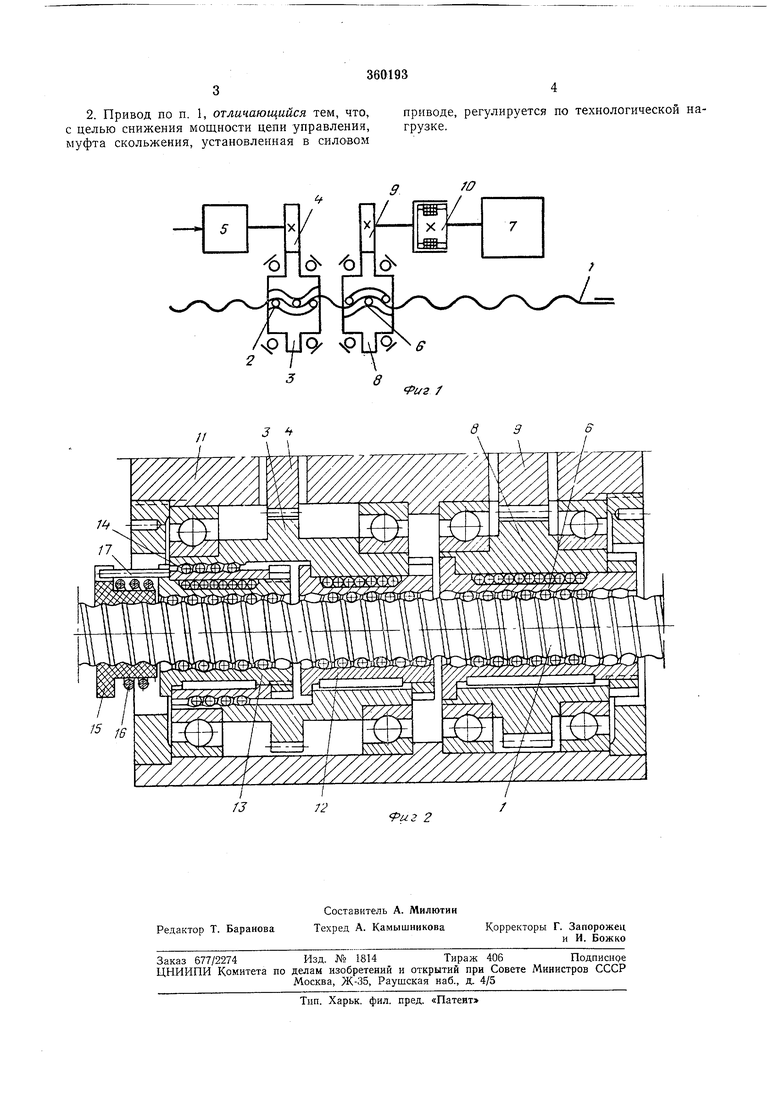
На фиг. 1 дана схема предлагаемого привода; на фиг. 2 - узел шариковых гаек.
Привод содержит невращающийся винт /, шариковую гайку 2, посредством шестерен 3, 4 связанную с шаговым двигателем 5, шариковую гайку 6, ОБязанную с силовым двигателем 7 посредством шестерен 8, 9, и малоинерционную муфту скольжения 10. Шариковая гайка 6 установлена в подшипниках в корпусе и. В корпусе // установлена также шариковая гайка 2 с двусторонним самотормозящимся действием, состоящая из полугаек 12 и 13, связанных винтовой парой 14, фрикционного элемента 1-5, поджимаемого пружиной 16
и удерживаемого на полугайке 13 штифтами 17.
При работе привода крутящий момент от двигателя 7 через индукционную муфту скольжения 10 с помощью шестерен 8, 9 передается гайке 6.
Однако винт 1 не получает поступательного перемещения, так как этому препятствует самотормозящаяся шариковая гайка 2. При
-поступлении сигнала на шариковый двигатель 5 он через шестерни S, 4 поворачивает гайку 2 на заданный угол. На такой же угол двигатель 7 синхронно проворачивает гайку 6, и винт перемещается, преодолевая технологическую нагрузку.
Предмет изобретения
1. Привод поступательного движения, например, подачи металлорежущего станка, содержащий управляющий двигатель и силовой привод движения подачи, отличающийся тем, что, с целью упрощения конструкции и эксплуатации, управляющая и силовая кинематические цепи установлены параллельно, заканчиваются винтовыми парами с общим винтом, образующими в цепи управления самотормозящуюся передачу, а в силовой цепи несамотормозящуюся передачу, связанную с приводом через муфту скольжения. 3 2. Привод по п. 1, отличающийся тем, что, с целью снижения мощности цепи управления, муфта скольжения, установленная в силовом 4 приводе, регулируется по технологической нагрузке, 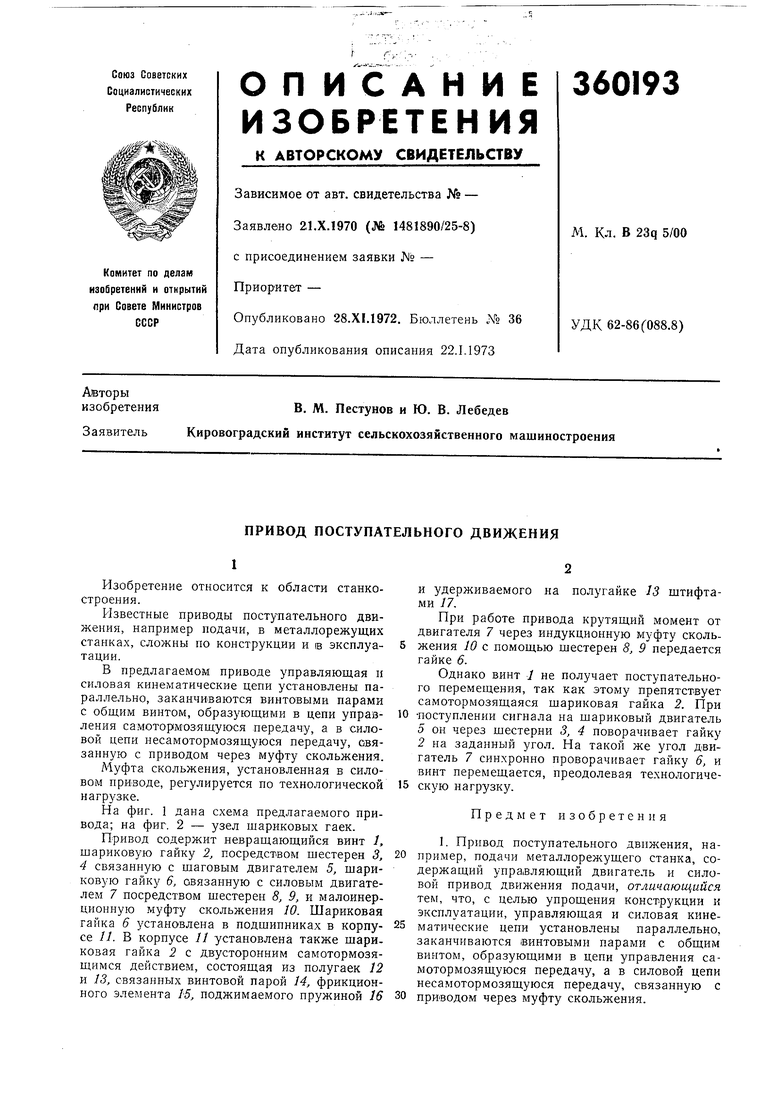
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод поступательного движения | 1976 |
|
SU671936A1 |
| Привод подвижного органа металлорежущего станка | 1988 |
|
SU1627771A2 |
| Привод поступательного движения | 1980 |
|
SU906663A1 |
| Переносной металлорежущий станок | 1990 |
|
SU1745432A1 |
| Электромеханический привод зажима Барановского В.В. | 1987 |
|
SU1511000A1 |
| Механический усилитель мощности | 1986 |
|
SU1425385A1 |
| Переносной сверлильно-резьбонарезной станок | 1982 |
|
SU1060362A1 |
| Силовая головка | 1973 |
|
SU464397A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2160679C1 |
| Винтовой пресс | 1976 |
|
SU616154A1 |
д -6
plil9 PlJ
U2 /
Риг 2
