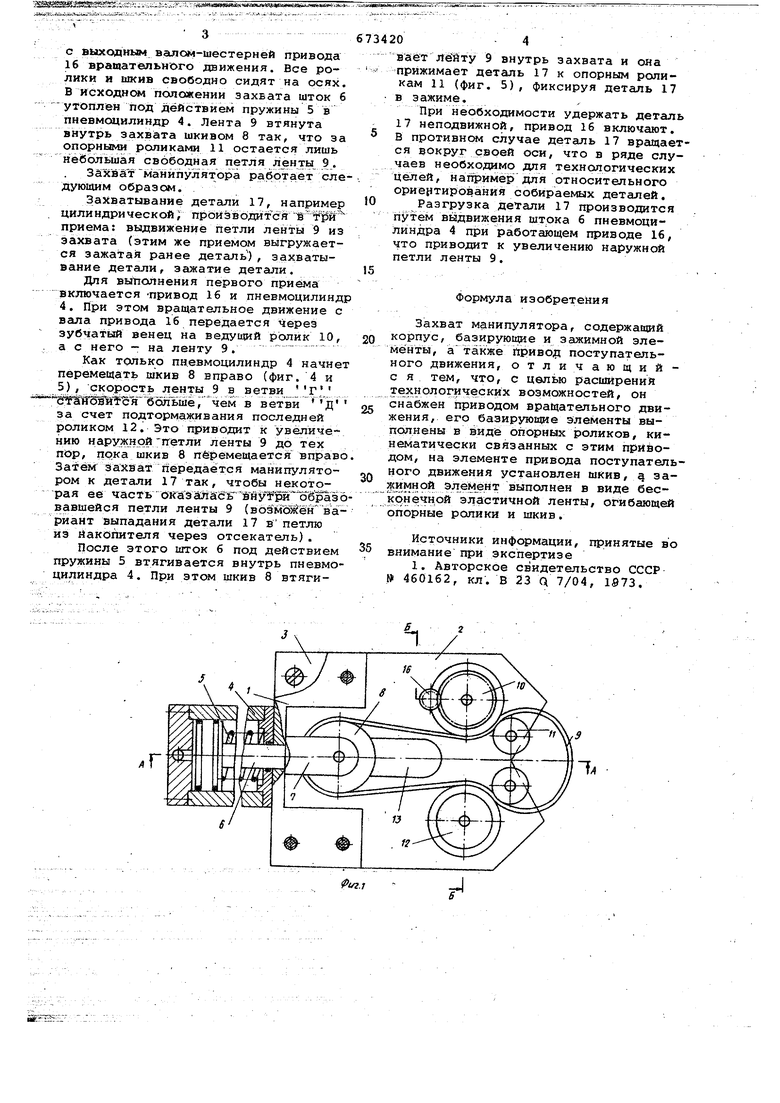
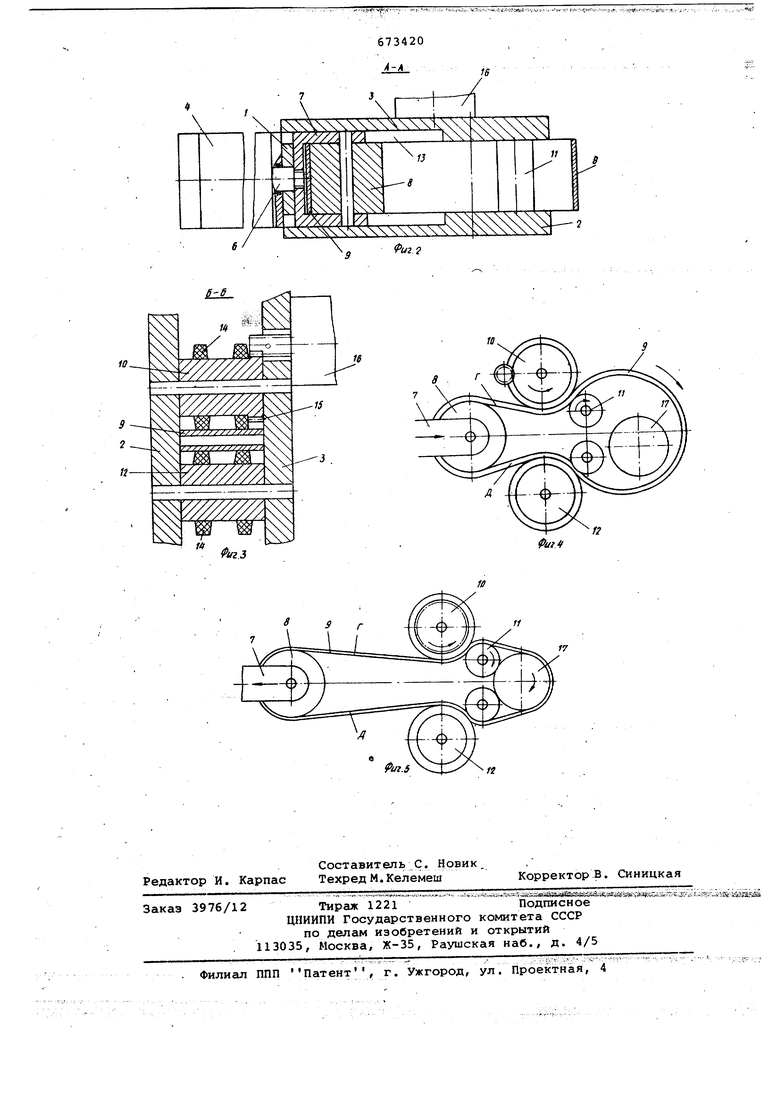
Предлагаемый захват предназначен для использования в качестве оснастки технологических манипуляторов и роботов при автоматизации механосборочных производств в машиностроении и в других .отраслях промышленности, а также в научных лабораториях. Известен захват манипулятора, содержащий корпус, базирующие и зажимные sjieMeHTH, а также привод поступа тельмого движения Ц. Недостатком известного захвата манипулятора является невоэможнооть захватывания деталей различных типоразмеров и конструкций. Целью изобретения является расширение технологических возможностей. Цель достигается тем, что захват снабжен приводом вращательного движе ния, его базирующие элементы выполнены 3 виде опорных роликов, кинематически связанных с этим приводом на элементе привода поступательного движения установлен шкив, а зажимной элемент выполнен в виде бесконечной эластичной ленты, огибающей опорные ролики и шкив. На фиг. 1 показан общий вид захвата в исходном положении; на фиг.2 разрез А-А на Фиг.1; на фиг.З разрез Б-Б на фиг.1; на фиг. 4 - схема расположения элементов захвата в момент взятия детали; на фиг. 5 то же, при удержании и манипулировании деталью. Захват состоит из корпуса 1, к которому прикреплены две щеки 2 и 3, а также привод поступательного движения, например пневмоцилиндр 4 одностороннего действия с пружиной 5 (фиг. 1 и 2). На штоке 6 пневмоцилиндра 4 укреплена скоба 7, несущая шкив 8, охваченный бесконечной упругой лентой 9, В передней части захвата лента 9 закреплена между ведущим роликом 10 и опорным роликом 11, а также между вторым опорным роликс л 11 и подтормаживающим роликом 12. Ролики 10, 11 и 12 свободно сидят на осях, укрепленных в щеках 2 и 3. На внутренних сторонах щек 2 i и 3 выполнены паЗы 13, являющиеся направляющими для скобы 7. Ведущий 10 и подтормаживающий 12 ролики имеют бандаж 14 (фиг. 3) из упругого фрикционного материала, выполненный двумя раздельными дорожкат ш. На ведущем ролике 10 выполнены зубчатые венцы 15, один из которых зацеплен С выходным валом-шестерней привода 16 вращательного движения. Все ролики и шкив свободно сидят на осях. В исходном положении захвата шток 6 утоплен под действием пружины 5 в пневмоцилиндр 4. Лента 9 втянута внутрь захвата шкивом 8 так, что за опорными роликами 11 остается лишь небольшая свободная петля ленты 9. Захватманипулятора работает сле дующим образом. Захватывание детали 17, например цили ндри ческ ой; прой з вЬдитсЯ 8 Щ приема: выдвижение петли ленты 9 из захвата (этим же приемом выгружается зажатая ранее деталь ) , захватывание детали, зажатие детали. Для выТголнения первого приёма включается привод 16 и пневмоцилиндр 4. При этом вращательное движение с вала привода 16 передается через зубчатый венец на ведущий ролик 10, а с него - на ленту 9. Как только пн.евмоцилиндр 4 начнет перемещать шкив 8 вправо (фиг. 4 и 5), скорость ленты 9 в ветви Г М8тУ ЪтыаеГчем в ветви Д за счет подтормаживания последней роликом 12. Это приводит к увёличению наружнойп етли ленты 9 до тех пор, пока шкив 8 перемещается вправо Затем захват передается манипулятором к детали 17 так, чтобы некотс)рая ее часть ОкаэШасьГЖну рй образо вавшейся петли ленты 9 (вОзмо)енвариант выпадания детали 17 впетлю из Накопителя через отсекатель). После этого шток 6 под действием пружины 5 втягивается внутрь пневмоцилиндра 4. При этсм шкив 8 втяги04вает лёйту 9 внутрь захвата и она прижимает деталь 17 к опорным роликам 11 (фиг. 5), фиксируя деталь 17 в зажиме, При необходимости удержать деталь 17 неподвижной, привод 16 включают. В противном случае деталь 17 вргодается вокруг своей оси, что в ряде случаев необходимо для технологических целей, например для относительного орие11тирования собираемых деталей. Разгрузка детали 17 производится путем выдвижения штока 6 пневмоцилиндра 4 при работающем приводе 16, что приводит к увеличению наружной петли ленты 9. Формула изобретения Захват манипулятора, содержащий корпус, базирующие и зажимной элементы, а также привод поступательного движения, отличающийс я тем, что, с целью расширений технологических возможностей, он снабжен приводом вращательного движения, его базирующие элементы выполнены в йидё опорных роликов, кинематически связанных с этим прййодом, на элементе привода поступательного движения установлен шкив, g зажимной элемент выполнен в виде бесконечной эластичной ленты, огибающей опорные ролики и шкив. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 460162, кл. В 23 а 7/04, 1673.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1983 |
|
SU1087327A1 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
| Манипулятор | 1985 |
|
SU1663034A1 |
| Привод конвейера дискретного действия | 2019 |
|
RU2723618C1 |
| Токарный станок | 1988 |
|
SU1683966A1 |
| Шаговый конвейер | 1984 |
|
SU1298147A1 |
| КОНВЕЙЕР С ПРЕРЫВИСТЫМ ДВИЖЕНИЕМ ТЯГОВОГО ОРГАНА | 2009 |
|
RU2416560C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2005 |
|
RU2381099C2 |
| ЭЛЕКТРИЧЕСКОЕ ЗАЖИМНОЕ УСТРОЙСТВО | 2012 |
|
RU2602582C2 |
| Устройство для деформации текстильных конических паковок в отделочном производстве | 1988 |
|
SU1594230A1 |
lr
10
иг.З
luit
.s
«
