. Изобретение относится к области вёсо -измерительной техники, а именно, к устройствам управления весовыми дозаторами, и может быть использовано к крксо-химической, угольной, металлургической пр м ьпнленностях для дозироваиия компрн«гтов угольной шихты.
Кроме того, изобретение может быть использовано в строительной, пищевой про}/1Ы1аленностях для всжешивания :н дозирования склонных к налицанию матфиалов.
Известно устройство управления «Biscoвым дозатором, содержащее датчики веса (преобразователи усилия), установлешгью на весоприемном устройстве, сумматор, регулятор, исполнительный механизм, управления бункером, логическое устройство выбора каналов управления, ёи юпобудитёль, функциональные щ еофазователи.
В указанном устройстве управл пм весовым дозатором для предотвршцения аварийного истечения материала из бункера на питатель предусмотрен регулятор выхода материала из бункера, вьшолнениый в виде клштана l .
При аварийном истечении материала из бункера на весоизмеритель резко возрастает сигнал отклонения текущего значения производительности от заданного, при этом увеличивается вотдействие на регулятор выхода материала из бугасера (уменьшается проходное сечение горловины бункера).
Таким образом, исключается самопроизвольное истечение материала из бункера при обрушениях свода или при перегрузке бункера, а следовательно, аварийная п егруэка весоизмерительного усп ройства.
Однако данное устройство не обеспечив требуемую точность дозирования, так как регулятор выхода материала из бункера (клапан) при тяжелых условиях работы, при ударах, происходящих во время попадания посторонних предметов в бункер, оказывается ненадежньпй, часто выходит «а строя. Наиболее близким по технической сущности является устройство управления ве совым дозатором, содержащее датчики веса и скорости, установленные на транспорТе ё-дозаторе и подключенные к входам блока измерения расхода материала, вЫкод которого связан с последовательно соединенными пропоршюнально- гнтегральнь1м , блокол памяти и маг нитным усилителем, подключенным к nejvвому входу привода транспортера-питател второй вход которого через первый ключе вой элемент связан с выходом порогового элемента, первый вход которого подключе к выходу блока измерения расхода матери ала, а второй - к выходу задйтчйка расзсо материала и второму входу пропорциональ но-интегрального регулятора 2 . При попадании посторонних предметов в бункер, обрушивании зависшего на стен ках бункера угля, на ленту питателя, а следовательно, и на ленту транспортера попадает недопустимо большое количество угля, при котором устройство может не справиться с заданной производитель- . ностью. Для контроля недопустимого отклонения фактической производительности от заданной в данном устройстве предусмот рен пороговый элемент, сигнал с которого поступает через первый ключевой элемент на привод питателя и привод транспЬртерй яля осТайовки дозатора. Существенным недостатком данного устройства управления весовым дозатором является низкая точность дозировакмя, особенно в условиях большой запыленности, когда имеет место налипание материала наленте транспортёра. Налипание материала на ленту трайсцортера вносит искажения в величину в&са угля, подаваемого с транспортера. В иэв;ёетнбм у стройстйё не предусматривается автоматическая компенсация изменения массы транспортера при налипании материала на его ленте Целью изобретения является повышение точности работы устройства. Указанная цель достигается тем, что устройство содержит блок временной задертйкй и йослёдойатепьно соединенные .второй ключевой элемент и блок коррек ции, второй вход которого соединен с бл6к(эм измерения расхода материала, вььход - с третьим входом блока измерения расхода мате зиала, а вход второго ключевого элемента подключен к выходу пер-, вого ключевого элемента и входу блока
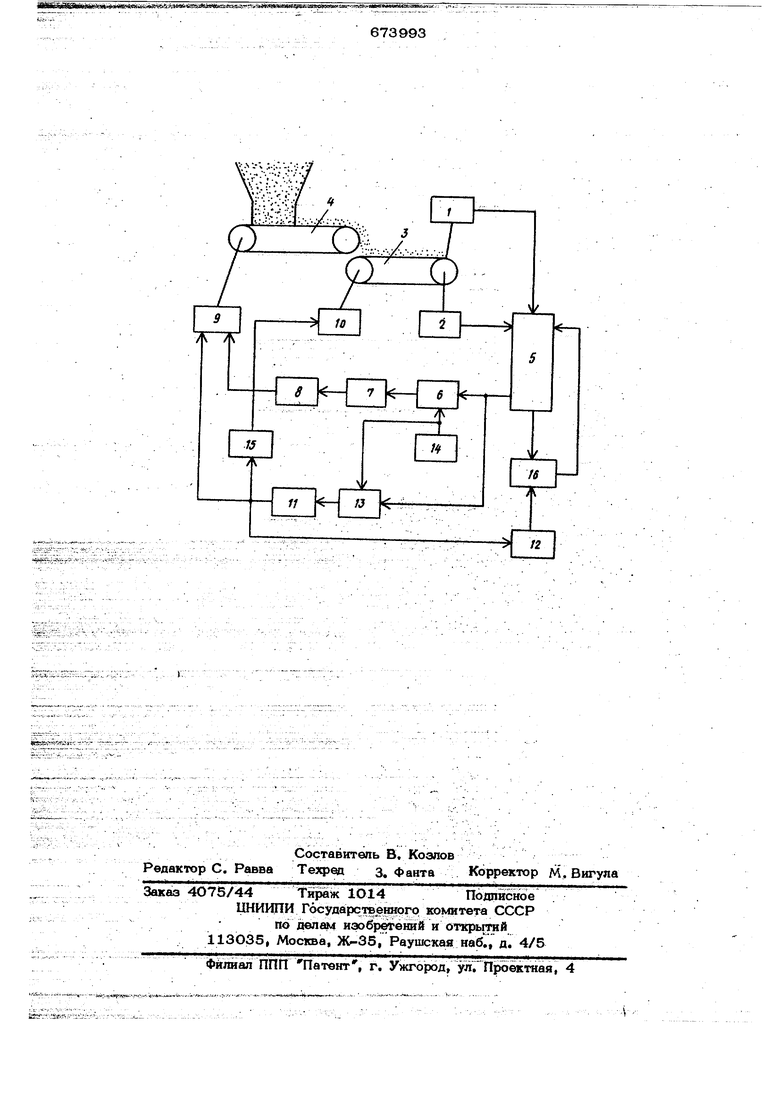
673993 Временной задержки, подключенного к приводу транспортера-дозатора. На чертеже представлена схема устройства управления весовым дозатором. Устройство управления весовым дозатором содержит датчик веса 1, датчик скорости 2, транспортер-дозатор 3, транспортер-питатель 4, блок 5 измерения расхода материала, пропорционально-интегральный регулятор 6, блок памяти 7, магнитный усилитель 8, привод транспортера-питателя 9, привод транспортера-дозатора 10, первый ключевой элемент 11, второй ключевой элемент 12, пороговый элемент 13, задатчик расхода материала 14, блок временной задержки 15, блок коррекции 16. Выход блока 5 изме11ения расхода материала связан со входом порогового элемента 13, на вход которого подается сигнал с задатчика расхода материала 14, Выход порогового элемента 13 соединен со входом второго ключевого элемента 12, управляющий выход которого соединен с приводом транспортера-питателя 9. Устройство также содержит блок временной задержки 15, ВЬЕХОД которого соединен с приводом транспортера-дозатора 10, а вход подключен к вьтходу первого к;почевого элемента 11, и с блоком коррекции 16j вход которого соединен с вькодами блока измерения расхода мат риала 5 и второго ключевого элемента 12, а выход подключен к третьему входу блока 5 измерения расхода материала, причем вход второго ключевого элемента 12 соединен с выходом первого ключ&вого элемента 11. Устройство управления весовым дозатором работает следующим образом. Материал с транспортера-питателя 4 поступает на транспортер-дозатор 3, масса которого воздействует на датчик веса 1. Сигнш с йатчика веса 1, пропорциональный массе материала, поступает в блок 5 измерения расхода материала, туда же поступает сигнал, пропорциональный скорости движения материала на транспортере-дозаторе 3 с датчика скорости 2, Выходной сигнал с блока 5 изерения расхода материала, пропорциональный расходу материала, воздействует на пропорционально-интегрального егулятора 6, где он сравнивается с сигналом задатчика 14 расхода материала 14. Если эти сигналы не равны, то на выходе пропорционально-интегрального регулятора б появляется сигнал, который поступает на вход блока памяти 7, осуществляющего запоминание сигнала и превращение его в токовый сигнал управления магнитным усилителем 6. Магнитный усилитель 8, воздействуя на привод постоянного тока дозатрра питателя Ю, способствует плавному изменению скорости движения ленты питателя 4 в ту или иную сторону до полного совпадения Сигналов на входе пропррционально-инт«рального регулятора 6. При совпадении сигналов на входе пропорционально-интегрального регулятора 6 на выходе его сигнал отсутс-тует и блок памяти 7 продолжает поддерживать устано вивщийся ток управления магнитным усили телем 8, собтветстбующий установившемуся расходу с транспортера-дозатора 3. Если фактический расход материала rto какой- шбо причине {нет материала в бункере) не равен заданному, то через проме жуток времени, больший чем время регулирования системы, на выходе порогового элемента 13 появляется сигнал, воздействующий на вход первого ключного элемента 11, который сразу отключает пр&од транспортера-питателя 9, а через блок временной задержки 15 отключает привод транспортера-дозатора 10 с тем, чтобы весь материал с него сошел, и подает сигнал на вход второго ключевого элемента 12, который воздействует ка блок коррекции 16. Работает блок 16 коррек1ши массы транспортера-дозатора 3 сразу же после любой остановки автюдозатора. При остановке транспортера-дозатора 3 сигнал с датчика веса 1 поступает в блок 5 измерения расхода материала, где он преобразуется и фиксирует изменение массы тары транспортера-дозатора 3 от нулевого положекия в большую или меньщую сторону и вьщаёт сигнал, пропорциональный изм€ нению массы тары, rtaГвход блока коррекции 16j осуществляющего преобразование этого сигнала в компенсирующий сигнал, который подается в блок 5 измерения расхода материала. Таким образом, при очередном включ& нии автодозатора в работу расход матери ала через транспортер -дозатор 3 будет определяться более точно. Автоматическая компенсация изменения массы транспортера при налипании материала На его ленте позволяет тельно повысить точность дознровшшя шихты. Устройство управления весовыми дозаторами прошло прокшцялешпзте испытания ш одном из дозаторов коксохимического производства Магнитогорского металлургического комбината- В. И. Ле1гина. Испытания показали наде сность работы устройств управления весовыми дозаторами. Внедрение устройств управления весовыми дозаторами в трех дозировочньк отделениях на 36 дозаторах позволило бы получить экономический эффект в 24О тыс, рублей в год. Формула изобретения Устройство управления весовым дозатором, содержащее датчики веса и скорости, установленные на транспортере-дозаторе и подключенные к входам блока измерения расхода материала, выход которого связан с последовательно соединенными пропорционально-интегральным peгyлятopo :, блоком памяти и магнитным усилителем, подключенным к первому входу привода транспортера-питателя, второй вход которого через первый ключевой элемент связан с выходом порогового эчемента, первый вход которого подключен к выходу блока измерения расхода материала, а второй - к выходу задатчика расхода материала и второму входу пропорционально-интегрального регулятора, отличающееся тем, что, с целью повышения Точности работы устройства, оно содержит блок временной задержки и последовательно соединенные второй ключевой элемент, блок коррекции второй вход которого соединен с блоком измерения расхода материала, выход - с третьим увходом блока измерения расхода материала, а вход второго ключевого элемента подключен к выходу первого ключевого элемента и входу блока временной задержки, подключенного к приводу транспорт а-дозатора. Источники информации, принятые во внимание при экспертизе 1.Автгорское свидетельство № 502227, кл. G 01 G 11/12, 1976. 2.Автоматизация процессов взвешивания. Под ред. Михайловского С, С., Сфлова С, П. М. , 1970, с. 37.
| название | год | авторы | номер документа |
|---|---|---|---|
| Весовой дозатор непрерывного действия | 1990 |
|
SU1742630A2 |
| Пневматический весовой дозатор непрерывного действия | 1977 |
|
SU684318A1 |
| Автоматический питатель раздатчика кормов | 1986 |
|
SU1445651A1 |
| Весовой дозатор непрерывного действия | 1977 |
|
SU678321A1 |
| Дозатор непрерывного действия | 1980 |
|
SU934234A1 |
| Весовой дозатор непрерывного действия | 1979 |
|
SU792082A1 |
| ВЕСОВОЙ РАСХОДОМЕР-ДОЗАТОР | 2016 |
|
RU2634325C1 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU939953A1 |
| ПОТОЧНЫЙ РАСХОДОМЕР-ДОЗАТОР СЫПУЧИХ МАТЕРИАЛОВ | 2012 |
|
RU2509986C2 |
| Способ весового дозирования сыпучих материалов и дозатор сыпучих материалов | 1987 |
|
SU1516792A1 |