1
Изобретение относится к области весоизмерительной техники.
Известны весовые дозаторы непрерывного действия, содержсшше грузоприемный механизм с датчиком веса, интегратор и регулятор скорости с задатчиком Структурная схема этих дозаторов может быть реализована как на электрических, так и пневматических элементах. Известен также дозатор непрерывного действия, содержащий преобразователь веса и преобразователь скорости ленты грузоприемного механизма, подключенные к блоку вычисления произведения вес на скорость, блок регистрации, генератор импульсов постоянной длительности и схему неравнозначности 2. Этот дозатор не может быть использован во взрывоопасном производстве. БлижаЛшим по технической сущности к изобретению является пневматический весовой дозатор непрерывного действия, содержащий питатель с приводом, грузоприемнь:й механизм в виде ленточного транспортера, связанного с преобразователями веса материала и скорости ленты, задатчик и регулятор производительности, выход которого соединен
через исполнительный механизм с приводом питателя З. Известный дозато не обеспечивает требуемой точности. Это обусловлено тем что скорость конвейерной ленты грузоприемного механизма нестабильна ввиду вариаций частоты питающей сети. Присутствие электропривода в этом дозаторе исключает возможность его использования во взрывоопасных помещениях.
Цель изобретения - повышение точности дозирования. В описываемом пневматическом весовом дозаторе непрерывного действия поставленная цель достигнута тем, что в него введены пассивный фильтр, форкшрователь импульсов постоянной длительности и амплитудно-импульсный модулятор, причем первый вход амплитудно-импульсного модулятора соединен с преобразователем веса материала, второй вход через формирователь импульсов постоянной длительности связан с преобразователем скорости ленты, а выход через пассивный филыр подключен к входу регулятора производительности .
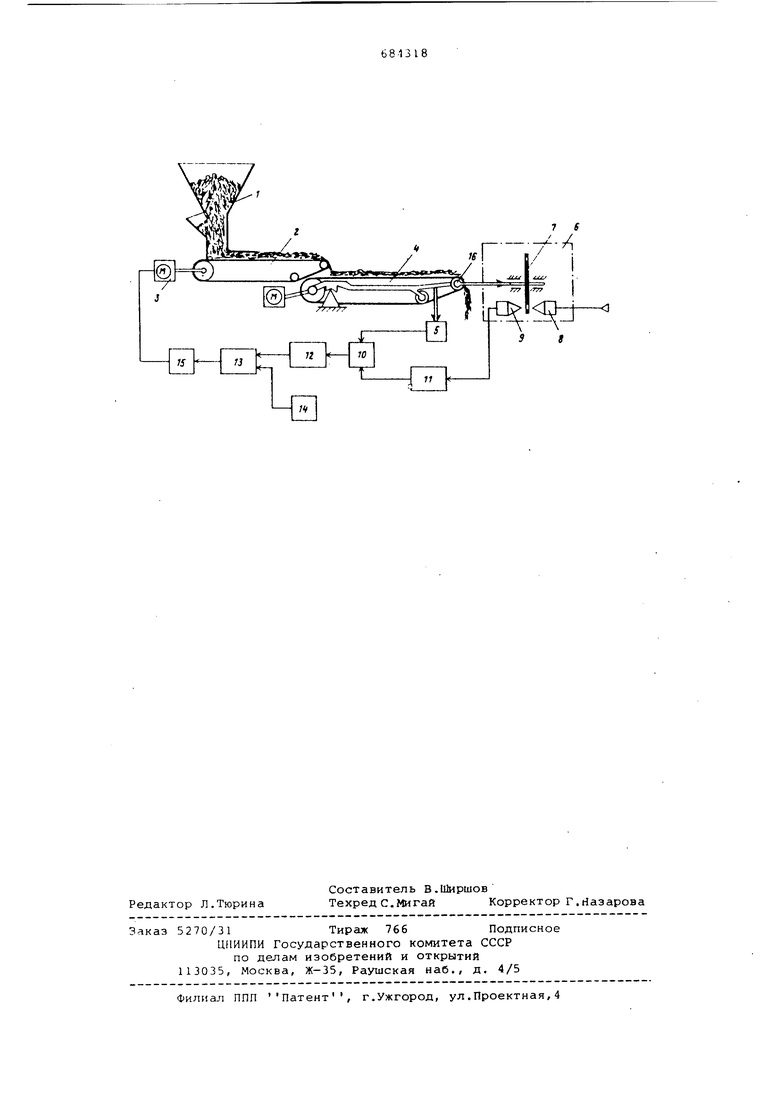
На чертеже схематически показан описываемый дозатор.
Он содержит загрузочный бункер 1, питатель 2 с пневматическим приводом 3, грузоприемниЯ механизм 4, связанный с пневматическим преобразователем 5 силы и преобразователем 6 скорости ленты, который включает перфорированный диск 7, подающее сопло 8 и приемное сопло 9, пневматический амплитудно-импульсный модулятор 10, первый вход которого через пневматический формирователь 11 импульсов постоянной длительности соединен с выходом приемного сопла 9 преобразователя 6 скорости ленты, второй вход подключен к выходу пневматического преобразователя 5 силы, а выход через пассивный пневматический фильтр 12 связан с входом регулятора 13, другой вход которого соединен с задатчиком 14 производительности, а выход через исполнительный механизм 15 соединен с приводом 3 питателя 2. В качестве привода в дозаторе используются, например, пневматические ротационные двигатели.
Сыпучий материал из загрузочного бункера 1 подается питателем 2 на грузоприемный механизм 4. Аналоговый пневматический сигнал, пропорциональный массе материала на ленте грузоприемного механизма 4, с выхода преобразователя 5 поступает на первый вход амплитудно-импульсного модулятора 10, на другой вход которого с выхода преобразователя 6 подается частотный пневматический сигнсш, пропорциональный угловой скорости перфорированного диска 7, жестко связанного с роликом 16 грузоприемного механизма 4. Частотный сигнал образуется в результате взаимодействия струи сжатого воздуха подающего сопла 8 с перфорированным диском 7, поступающий затем в приемное сопло 9. Пневматический частотный сигнал с постоянной длительностью импульсов создается формирователем 11 и поступает на второй вход амплитудно-импульсного модулятора 10, где формируется частотный пневматический сигнал, частота которого пропорциональна скорости ленты грузоприемного механизма 4, а амплитуда - усилию, пропорциональному массе материала на этой ленте. Получаемый таким образом модулированный пневматический сигнал поступает с выхода амплитудно-импульсного модулятора 10 на вход пневматическог пассивного фильтра 12, где происходит преобразование модулированного по амплитуде частотного сигнала в ансшоговый сигнал, пропорциональный
текущему значению производительности дозатора.
Масштаб преобразования осуществляется путем выбора настроечных параметров пневматического пассивного фильтра.
Аналоговый выходной сигнал, пропорциональный произведению массы материала на скорость его транспортирования (производительности) с фильтра 12 поступает на вход регулятора 13, в котором происходит его сравнение с сигналом заданного значения производительности дозатора, поступающим от задатчика 14. Регулятор 13 осуществляет обработку сигнала рассогласования, например, по пропорционально-интегральному закону регулирования и выдает управляющее воздействие через и-полнительный механизм 15, например, мембранного типа на пневматический привод 3 питателя 2, который изменяет производительность дозатора, приводя в соответствие текущее ее значение.заданному.
Формула изобретения
Пневматический весовой дозатор непрерывного действия, содержащий питатель с приводом, грузоприемный механизм в виде ленточного транспортера, связанного с преобразователями веса материгша и скорости ленты, задаТчик и регулятор производительности, выход которого соединен через исполнительный механизм с приводом питателя, отличающийся тем, что, с целью повышения точности дозирования, в него введены пассивный фильтр, формирователь импульсов постоянной длительности и амплитудноимпульсный модулятор, причем первый вход амплитудно-импульсного модулятора соединен с преобразователем веса материала, второй вход через формирователь импульсов постоянной длительности связан с преобразователем скорости ленты, а выход через пассивный фильтр подключен к входу регулятора производительности.
Источники информации, принятые во внимание при экспертизе
1.Карпин Е.Б. Средства автоматизации для измерения и дозирования массы. М., Машиностроение, 1971, с. 172-186.
2.Авторское свидетельство СССР W212570, кл. G 01 G 11/08, 1966.
3.Авторское свидетельство СССР №286272, кл. G 01 G 13/10, 1969.
7 S
| название | год | авторы | номер документа |
|---|---|---|---|
| Весовой дозатор непрерывного действия | 1980 |
|
SU939953A1 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU901837A1 |
| Пневматический весовой дозатор непрерывного действия | 1979 |
|
SU792081A1 |
| Дозатор непрерывного действия | 1979 |
|
SU798739A1 |
| Весовой дозатор непрерывногодЕйСТВия | 1978 |
|
SU794390A1 |
| Весовой дозатор непрерывного действия | 1977 |
|
SU746197A1 |
| Пневматический весовой дозатор непрерывного действия | 1984 |
|
SU1185104A1 |
| Дозатор непрерывного действия | 1979 |
|
SU826292A1 |
| Устройство для непрерывного весового дозирования сыпучих материалов | 1980 |
|
SU892225A1 |
| Устройство контроля тарировки дозаторов | 1976 |
|
SU651203A1 |