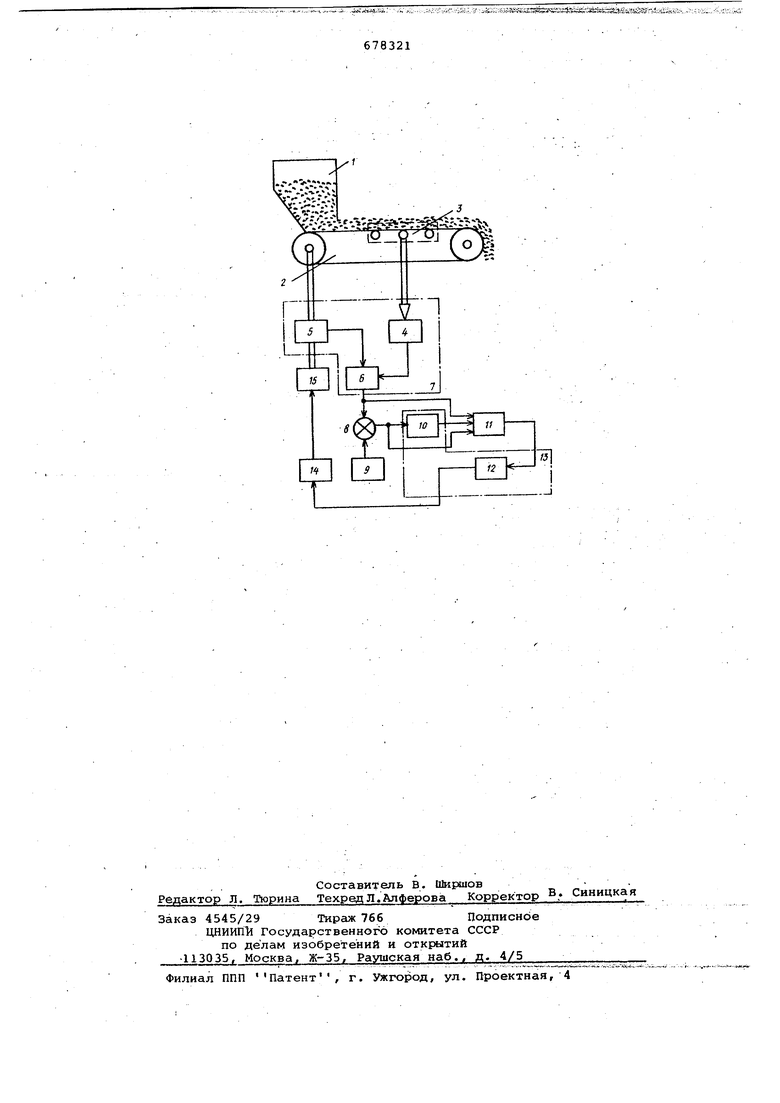
Изобретение относится к области соизмерительной техники. Известны весовые порционные доза торы, содержащие ленточный питатель датчики веса и скорости, подключенные к узлу перемножения, узел сравнения, задатчик иГрегулятор 1. Ближайшим по технической сущност к изобретению является весовой дбза тор непрерывного действия,содержащи загрузочный бункер, под которым .установлен питатель в виде ленточного транспортера с датчиками веса и скЪрости, подключенными к перемножителю, образующими преобразоватфль производительности, соединен ный с одним из входов блока сравнения, к другому входу которого под ключен задатчик производительности, и регулятор с дифференциальным и пропорционально-интегральными блока ми, связанный с приводом питателя 2. Известный дозатор не обеспечивает требуемой то 1ности при дозировании сыпучих материалов с переменными физико-механическими свойствами или при переходе дозирования с одного материала на другой. Цель изобретения - повькяение точ ности. В описываемом дозаторе поставленная цель достигнута тем, что в него введен адаптивный блок, первый вход которого соединен с выходом преобразователя производительности, второй вход связан с выходом блока сравнения, третий вход подключен к выходу дифференциального блока, вход которого соединён с выходом блока сравнения, а выход адаптивного блока пoдkлючeн к входу пропорционально-интегрального блока регулятора . На чертеже показана функциональная схема описываемого весового дозатора непрерывного действия. Загрузочный бункер 1 установлен над питателем, выполненным в виде ленточного транспортера 2, имеющего взвешиваемый участок 3, опирающийся на датчик 4 веса. Ленточный транспортер 2 имеет датчик 5 скорости, соединенный с одним их входов перемножителя 6, второй вход которого соединен с датчиком 4. Датчик 4, датчик 5 и перемножитель 6 составляют преобразователь .7 производительности, выход которого соединен с одним «3 входов блока 8 сравнения, другой вход которого связан с задатЧИКОМ.9 пройзвод;йтельности. Выход блока 8 соединен с входом дифференцирующего блока 10, выход которого подключен к одному из трех входов
адаЪтйвнбго блока 11. Второй вход адаптивного блока 11 соединен с выходом преобразователя 7, третий вход соединен с выходом блока 8, авыход
,подключен ко входу пропорциональноинтегрального блока 12 регулятора 13, Пропорционально-интегральный блок 12 через усилитель 14 мощности соединён с приводом 15 транспортера 2.
Дозируемый материал из загрузрчного бункера 1 транспортером 2 подается на участок 3, который связан с датчиком 4 веса, непрерывно измеряющим усилие, пропорциональное массе материала на ленте. Скорость.перемещения; материала измеряется датчиком 5 скорости ленточного -транспортера 2. В перемн ожителе б сигналы датчиков 4 и 5 перемножаются, а результирующий сигнал, являющийся выходным сигналом преобразователя 7 производительности подается на один из входов блока 8 сравнения,а также на один из трех входов адаптивного блока 11. На другой вход блока 8 подается сигнал задания производительности QO, от задатчика 9 производительности, который сравнивается с сигналом текущей производительности Q а сигнал разбаланса Q-,.-QT, с выхода блока 8 поступает на вход дифференцирующе г6 блока 10 Выходной сигнал дифференцирующего блока 10 - сигнал первой, производной от разбаланса-подается на входадаптивного блока 11, на другой вход которого поступает сигнал разбаланса с выхода блока 8. В зависимости от изменения текущих значений параметров дозатора разбаланса .6 заданногоР и текущегоО зна-
чений производительности и скорости изменения разбаланса , что обуслбвлено действием неконтролируемых . возмущающих воздействий в контуре регулирования, связанных с неравномерностью .гаранулометрического состава, переменной влажностью дозируемого материала или с переходом с одного вида дозируемого материала на другой, адаптивный блок 11 изменяет свою структуру; принимая то или иное фикси)ован;но;е значение коэффициента усиления, Си гнал. снимаемый с выходаадаптивного блока 11 и равный гГроизведению переменного коэффициента усиления блока ла сумму сигналов разбаланса и его производной , подается на вход пропорционально-интегрального блока 12 регулятора 13 и воздействует на него, изменяя его параметры
настройки: коэффициент усиления и постоянную интегрирования. В результате этого параметры настройки регулятора принимают оптимальные значения в сортветствии с действующими в контуре регулирования возмущающими воздействиями. Выработанный таким образом управляющий сигнал с чнхода пропорционально-интегрального блока 12 через усилитель 14 мощности воздействует на привод 15 и изменяет
0 скорость движения ленты транспортера 2, обеспечивая равенство Значений измеряемой и заданной производительности.
Таким образом, в описываемом весо5 .вом дозаторе непрерывного действия осуществляется автоматическое регулирование процесса дозирования по пропорционально-интегрально-дифференциальному закону с переменной структурой регулятора, адаптивной к действующим в контуре регулирования возмущающим воздействиям, что позволяет существенно повысить точность дозирования.
Формула изобретения
Весовой дозатор непрерывного действия, содержащий загрузочный бункер
0 под которым установлен питатель в виде ленточного транспортера с датчиками веса и скорости, подключенными к перемножителю г-образующими преобразователь производи,тельности, соединенный с одним из входов блока сравнения, к другому входу которого подключен задатчик производительности, и регулятор с дифференциальным и пропорционально-интегральными бло0 ками, связанный с приводом питателя, отличающийся тем, что, с целью повышения точности, в него введен адаптивный блок , первый вход, которого соединен с выходом преобразователя производительности, второй вход связан с выходом блока сравнения, третий вход подключен к выходу дифференциального блока, вход котоЕ ого соединен с выходом блока сравнёнйя, а выход адаптивного блока
подключен к входу пропорциональноинтеграль ного блока регулятора.
Источники информации, принятые во внимание при экспертизе 1. Карпин Е. Б. Средства автоматизации для измерения и дозирования массы. М., Машиностроение, 1971, с. 393.
2. Орлов С. П. и др. Справочник .Весы и дозаторы , М,, Машиностроение, 1972, с. 179-180.
678321
| название | год | авторы | номер документа |
|---|---|---|---|
| Весовой дозатор непрерывного действия | 1975 |
|
SU670818A1 |
| Пневматический весовой дозатор непрерывного действия | 1977 |
|
SU684318A1 |
| Дозатор непрерывного действия | 1986 |
|
SU1392384A1 |
| Весовой дозатор непрерывного действия | 1982 |
|
SU1045001A1 |
| Весовой дозатор непрерывного действия | 1981 |
|
SU979876A1 |
| Весовой дозатор непрерывного действия | 1984 |
|
SU1229584A1 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU939953A1 |
| Устройство для весового дозирования веществ,подлежащих смешиванию | 1981 |
|
SU972242A1 |
| Устройство управления весовым дозатором непрерывного действия | 1982 |
|
SU1016685A1 |
| Весовой дозатор непрерывного действия | 1982 |
|
SU1059443A1 |