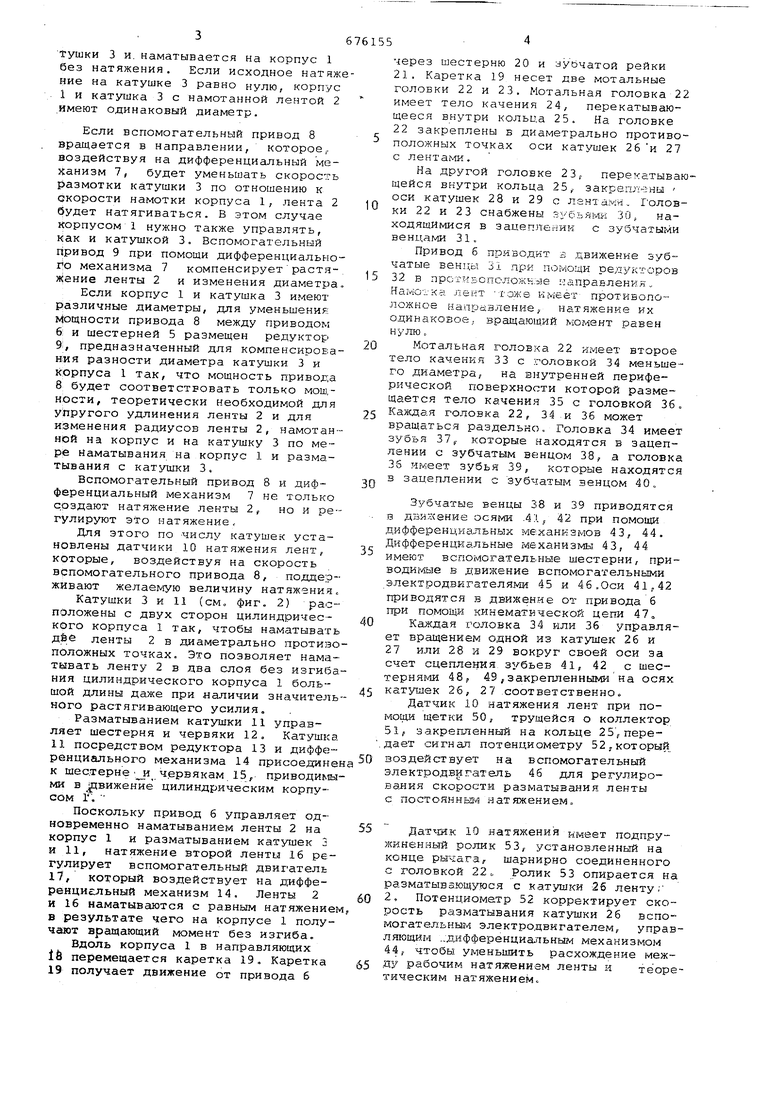
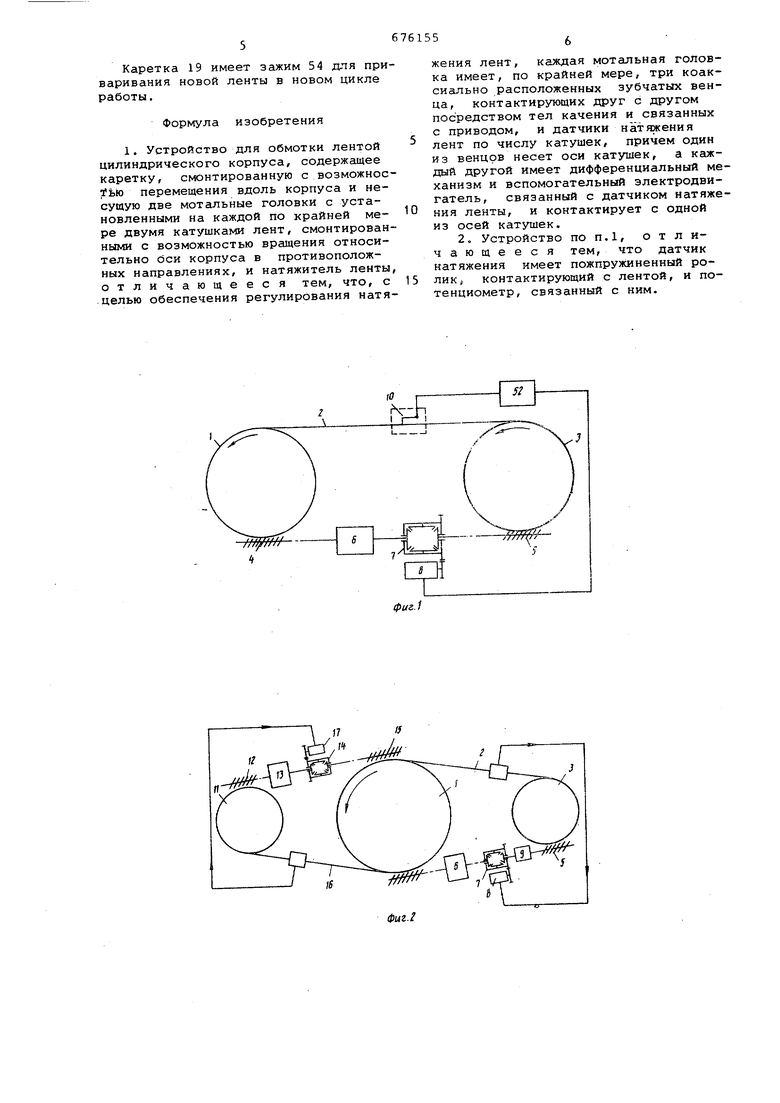
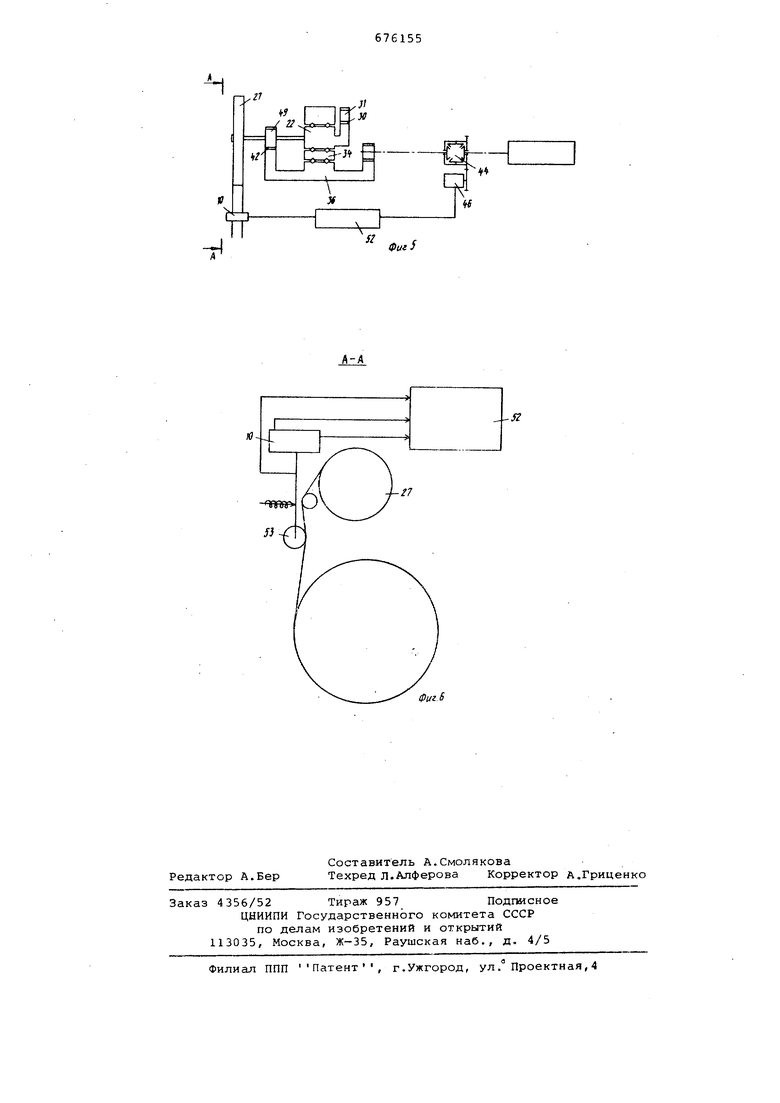
Тушки 3 и. наматывается на корпус 1 без натяжения. Если исходное натяже ние на катушке 3 равно нулю, корпус 1 и катушка 3 с намотанной лентой 2 имеют одинаковый диаметр. Если вспомогательный привод 8 вращается в направлении, которое,, воздействуя на дифференциальный механизм 7, будет уменьшать скорость размотки катушки 3 по отношению к скорости намотки корпуса 1, лента 2 будет натягиваться. В этом случае Корпусом 1 нужно также управлять, как и катушкой 3. Вспомогательный привод 9 при помощи дифференциального механизма 7 компенсирует растяжение ленты 2 и изменения диаметра Если корпус 1 и катушка 3 имеют различные диаметры, для уменьшения мощности привода 8 между пpивoдo i 6: и шестерней 5 размещен редуктор 9, предназначенный для компенсироЕ:ания разности диаметра катушки 3 и корпуса 1 так, что мощность привода 8 будет соответстБовать только мош,нести, теоретически необходимой для упругого удлинения ленты 2 и для изменения радиусов ленты 2, намотанной на корпус и на катушку 3 по мере Наматывания на корпус 1 и разматывания с катушки 3. Вспомогательный привод 8 и дифференциальный механизм 7 не только с.рздают натяжение ленты 2, но и регулируют эТо натяжение. Для этого по числу катушек установлены датчики 10 натяжения лент, которые, воздействуя на скорость вспомогательного привода 8, поддерживают желаемую величину натяжения Катушки 3 и 11 (сМо фиг. 2) расположены с двух сторон цилиндрического корпуса 1 так, чтобы наматывать дбе ленты 2 в диаметрально противо положных точках. Это позволяет намативать ленту 2 в два слоя без изгиб ния цилиндрического корпуса 1 большой длины даже при наличии значитель ного растягивающего усилия. Разматыванием катушки 11 управляет шестерня и червяки 12, Катушк И посредством редуктора 13 и диффевренциального механизма 14 присоедине к шестерне червякам 15, приводимы ми в вижение цилиндрическим корпусом Г, Поскольку привод б управляет одновременно наматыванием ленты 2 на корпус 1 и разматыванием катушек 3 и 11, натяжение второй ленты 16 ре гулирует вспомогательный двигатель 17, который воздействует на дифференцигльный механизм 14, Ленты 2 и 16 наматываются с равным натяжение в результате чего на корпусе 1 полу чают вращающий момент без изгиба. Вдоль корпуса 1 в направляющих 16 перемещается каретка 19. Каретка 19 получает движение от привода 6 через шестерню 20 и зубчатой рейки 21. Каретка 19 несет две мотальные головки 22 и 23, Мотальная головка 22 имеет тело качения 24, перекатывающееся внутри кольца 25. На головке 22 закреплены в диаметрально противоположных точках оси катушек 26 и 27 с лентак-и. На другой головке 23 перекатывающейся внутри кольца 25, закреплены оси катушек 28 и 29 с лантамн. Головки 22 и 23 снабжены зубьями 30, находящимися в зацеплении с зубчатыми венцами 31. Привод б приводит в движение зубчатые венцы 31 при помощи релукторов 32 в прсгкБОположн.ые мапраЕленкя. HaiviOj-Ka лент -гожв имеет противопо.л.ожное направление, натяжение их одинаковое; вращающий момент равен нулю Мотальная головка 22 имеет второе тело качения 33 с головкой 34 меньшего диаметра, на внутренней периферической поверхности которой размещается тело качения 35 с головкой 36„ Каждая головка 22, 34 и 36 может вращаться раздельно. Головка 34 имеет зубья 37,, которые находятся в зацеплении с зубчатым венцом 38, а головка 3S имеет зубья 39, которые находятся в зацеплении с зубчатым зенцом 40. Зубчатые венцы 38 и 39 приводятся в движение осями 42 при помощи дифференциальных мб.ханиамов 43, 44. Дифференциальные (-механизмы 43, 44 имеют вспомогательные шестерни, приводимые в движение вспомогательными электродвигателями 45 и 46.Оси 41.42 приводятся в движение от привода б при помощи кинематической цепи 47,, Каждая головка 34 или 36 управляет вращением одной из катушек 26 и 27 или 28 и 29 вокруг своей оси за счет сцепления зубьев 41, 42 с шестернякта 48, 49,закрепленнымина осях катушек 26, 27 .соответственно Датчик 10 натяжения лент при помощи щетки 50, трущейся о коллектор 51, закрегшенный на кольце 25, пере,дает сигнал потенциометру 52.который воздействует на вспомогательнЕзШ электродвигатель 46 для регулирования скорости разматывания ленты с постоянньа я натяжением. Датчик 10 натяжения имеет подпружиненный ролик 53, установленный на конце рычага, шарнирно соединенного с головкой 22.. Ролик 53 опирается на разматывз ощутося с катушки 26 ленту, 2, Потенциометр 52 корректирует скорость разматывания катушки 26 вспомогательным электродвигателем, управляющим ..дифференциа тьным механизмом 44f чтобы уменьшить расхождение между рабочим натяжением ленты и теоретическим натяжениемо
Каретка 19 имеет зажим 54 для приваривания новой ленты в новом цикле работы.
Формула изобретения
1. Устройство для обмотки лентой цилиндрического корпуса, содержеицее каретку, смонтированную с возможностью перемещения вдоль корпуса и несущую две мотальные головки с установленными на каждой по крайней мере двумя катушками лент, смонтированными с возможностью вращения относительно оси корпуса в противоположных направлениях, и натяжитель ленты, отличающееся тем, что, с .целью обеспечения регулирования натяжения лент, каждая мотальная головка имеет, по крайней мере, три коаксиально расположенных зубчатых венца, контактирующих друг с другом посредством тел качения и связанных с приводом, и датчики натяжения лент по числу катушек, причем один из венцов несет оси катушек, а каждый другой имеет дифференциальный механизм и вспомогательный электродвигатель, связанный с датчиком натяже0ния ленты, и контактирует с одной из осей катушек.
2. Устройство по П.1, отличающееся тем, что датчик натяжения имеет пожпружиненный ро5лик контактирующий с лентой, и потенциометр, связанный с ним.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ ИЗДЕЛИЙ ИЗ ДЛИННОМЕРНЫХ МАТЕРИАЛОВ | 1992 |
|
RU2106969C1 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ ГИБКОГО ДЛИННОМЕРНОГО МАТЕРИАЛА | 2012 |
|
RU2505371C1 |
| Дифференциальный механизм к мотальным машинам для попеременного ускорения и замедления нитеводящих органов | 1931 |
|
SU43398A1 |
| Станок для наложения изоляционной ленты на катушки электрических машин | 1979 |
|
SU904117A1 |
| Станок для намотки изделий сложного профиля на неподвижных оправках | 1973 |
|
SU786169A1 |
| ПЕЧАТАЮЩЕЕ УСТРОЙСТВО С ПОВОРОТНЫМ МЕХАНИЗМОМ С ЗУБЧАТОЙ ПЕРЕДАЧЕЙ | 2004 |
|
RU2344044C2 |
| Кассетный аппарат для магнитной записи-воспроизведения информации | 1990 |
|
SU1723582A1 |
| Намоточная головка | 1988 |
|
SU1585839A1 |
| Станок для наложения изоляционной ленты на катушки электрических машин | 1981 |
|
SU989686A2 |
| РУЧНОЕ УСТРОЙСТВО ДЛЯ ПЕРЕНОСА ПЛЕНКИ С НЕСУЩЕЙ ЛЕНТЫ НА СУБСТРАТ | 2000 |
|
RU2203846C1 |
V
25
0titS
-S2
ФигВ
