(54) ГИДРОСИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСНОГО АСФАЛЬТОУКЛАДЧИКА
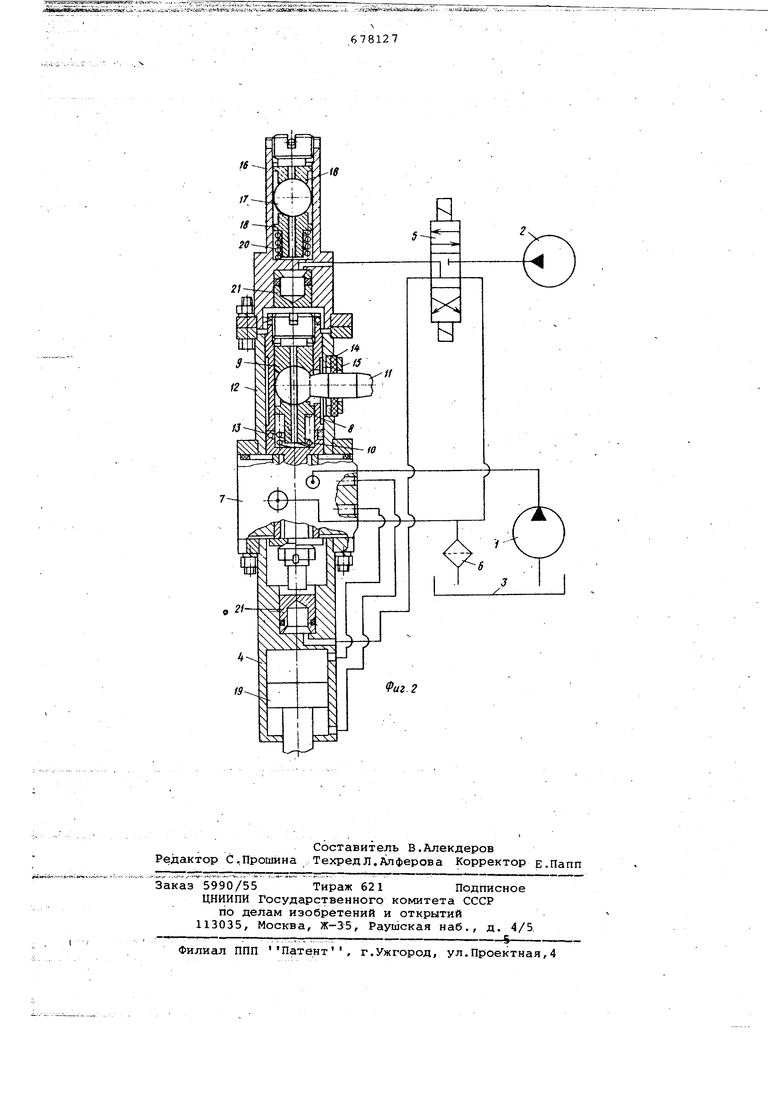
жины 10 соединен с пальцем 11, установленньми в корпусе 12. Золотник 8 уплотнен кольцом 13. Палец 11 уплотнен шайбой 14, прижатой к корпусу 12 крышкой 15.
В корпусе 16 установлен палец 17. с сухарями 18 и пружиной 20. Корпус 16 соединен с корпусом 12.
В гидроусилителе 4 установлен шток 19. У торцов золотника Бив корпусах 4 и 16 установлены гидротолкатели 21 с уплотнительными кольцами.
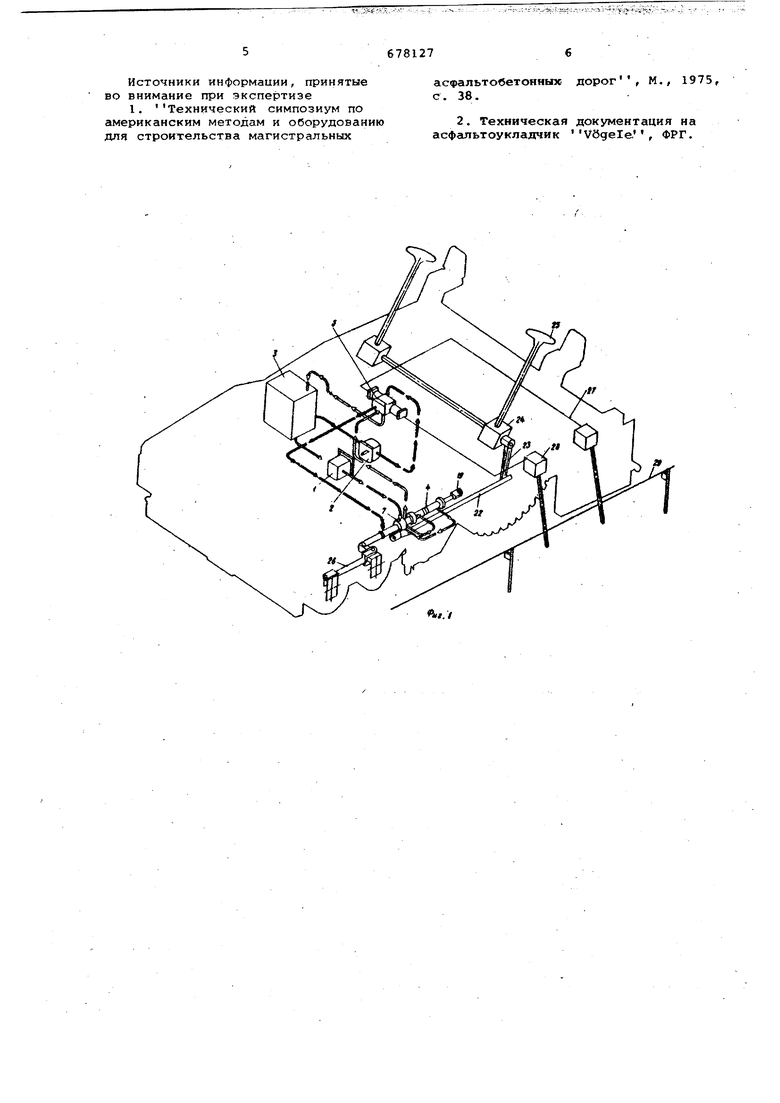
Шток 19 закреплен на раме, а палец 11 посредством тяги 22, сошки 23, редуктора 24 соединен с рулевым колесом 25 асфальтоукладчика. Палец l7 соединен с рулевой трапецией 26 управляемых колес асфальтоукладчика. Электромагниты распределителя 5 электрической цепью 27 св.яэаны с датчиками 28 курса асфальтоукладчика, которые контактируют с копиром 29, установленным на трассе.
Рулевое управление может работать на ручном и автоматическом режиме. При работе на ручном режиме поворот рулевого колеса 25 вызывает перемещение сошки 23, тяги 22 и пальца 11, которое через сухари 9 и пружину 10 передается золотнику 8. Золотник 8, перемещаясь в корпусе 7 гидроусилителя 4, открывает проход рабочей жидкости от насоса 1 в одну из полостей гидроусилителя 4, соединяя другую полость с масляным баком 3. Поскольку шток 19 неподвижен, корпус гидроусилителя, перемещаясь, передает движение пальцу 17, поворачивая этим управляемые колеса асфальтоукладчика до тех пор, пока перемещающийся корпус гидроусилителя 4 не установится относительно золотника 8 в положение, соответствующее нейтральному. В этот момент поворот асфальтоукладчика прекратится. При перемещении пальца 11 в другую сторону от нейтрального положения золотника 8 описанные перемещения реверсируются, и асфальтоукладчик поворачивается в другую сторону.
Скорость поворота асфальтоукладчика определяется скоростью поворота рулевого колеса. В нейтральном положении золотника 8 обе полости гидроусилителя 4 соединены со сливом
При работе на автоматическом режиме управления работа гидравлического усилителя аналогична работе на р чном режиме. Разница заключается в том/ что золотник 8 перемещается не от воздействия пальца 11, а .от воз действия гидротолкателей 21, полости которых связаны с цилиндровыми магистралями электрогидрораспределителя 5 с электромагнитным управлением. При нейтральном положении золотника электрогидрораспределителя 5 обе торцЬвые полости гидротолкателей 21
соединены с баком и они не воздействуют на золотник 8.
В случае воздействия копира 29 (проволоки или бордюра) на датчик 8 курса электрический сигнал от датчика поступает на один из магнитов распределителя 5, который переключает распределитель в рабочее положение. Торцовая полость одного из гидротолкателей оказывается под давлением, а торцовая полость второго гидротолкателя соединяется в электрогидрораспределителе 5 с маслным баком 3.-Давлением жидкости гидротолкатель перемещается, сдвига золотник 8, что вызывает поворот асфальтоукладчика той же системой и в том же порядке, как показано в 9 1исании работы на ручном режиме.
Этот поворот происходит до того момента,пока копир -29 не перестанет действовать на указанный датчик и распределитель 5 не установится в нейтрашьное положение. Асфальтоуклачик продолжает двигаться по установленному курсу до тех пор, пока второй из датчиков 28 курса, установленный на асфальтоукладчике со смещением вдоль машины относительно первогс) датчика не подает электрический сигнал на второй электромагн распределителя, который переключит электрогидрораспределитель 5 в Щ)угое рабочее положение, реверсируя перемещение гидротолкателей 21 и соответственно золотника 8. Это вызывает поворот асфальтоукладчика в противоположную сторону. Таким образом, асфальтоукладчик движется вдоль копира на автоматическом режиме за счет той же системы управления поворотом.
Напорная магистраль электрогидрораспределителя 5 соединена с насосом 2, установленном на асфальтоукладчике. Возврат золотника электрогидрораспределителя 5 из рабо.чих положений в нейтральное осуществляется пружинами, установленными в этом электрогидрораспределителе.
Формула изобретения
Гидросистетла рулевого управления колесного асфальтоукладчика, включающая масляный бак, гидронасос и гидроусилитель со следящим золотником, связанным с рулевым колесо отличающаяся тем, что, с целью обеспечения автоматического режима работы, гидросистема снабжен датчиками курса и электрогидрораспределителями, а в корпус гидроусилителя вмонтированы гидравлические толкатели, взаимодействующие с торцами следящего золотника и связанные через электрогидрораспределители с датчиками курса.
Источники информации, принятые во внимание при экспертизе
1. Технический симпозиум по американским методам и оборудованию для строительства магистральных
асфальтобетонных дорог , М,, 1975, с. 38.
2. Техническая документация на асфальтоукладчик VOgele, , ФРГ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидроусилитель рулевого управления транспортного средства | 1988 |
|
SU1521651A1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| Распределитель рулевого управления с гидроусилителем для транспортных средств | 1971 |
|
SU578849A3 |
| Устройство для автоматического направления движения колесного трактора по рядкам растений | 1978 |
|
SU704499A1 |
| МЕХАНИЗМ ПЕРЕДАЧИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ С ЗАПАЗДЫВАНИЕМ И МЕХАНИЗМ РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСАМИ ЗАДНЕГО МОСТА С ЕГО ИСПОЛЬЗОВАНИЕМ | 2017 |
|
RU2657163C1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ МНОГООСНОЙ КОЛЕСНОЙ МАШИНЫ | 2001 |
|
RU2196696C1 |
| Система автоматического вождения тракторного агрегата на склонах | 1985 |
|
SU1391519A1 |
| Рулевое управление транспортного средства со всеми управляемыми колесами | 1987 |
|
SU1497091A1 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ДВУХЗВЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2015 |
|
RU2615804C1 |
6
tr
678127
