1
Изобретение относится к измерительной технике и может быть использовано при разработке измерителей микромоментов компенсационного типа.
Известны устройства для измерения моментов, содержащие подвижную часть установленную в подвесе, и датчик углового положения подвижной части 1, Эти известные устройства не
обеспечивают достаточной точности и чувствительности. Наиболее близким к изобретению по технической сущности является устройство для измерения моментов, содержащее подвижную часть установленную в подвесе, датчик углового положения подвижной части, усилитель обратной связи и моментный датчик гальванометрического типа 2, Однако, имея необходимую чувствитальность, известное устройство не обеспечивает требуемой точности из-за погрешности, обусловленной квадратичной нелинейностью статичес.кой характеристики. Отмеченная велинейность определяется эффектом размагничивания магнита моментного датчика током его обмотки.
Цель изобретения заключается в повышении точности. В предложенном
устройстве это достигается тем, что в него введен блок регулировки коэффициента усиления усилителя, реализующий соотношение
-IT- ду
tyкоэффициент усиления усигделителя;
коэффициент преобразоваК
мр;. ния мсментного датчика; коэффициент нелинейности
l моментного датчика, определяемый эффектом размагничивания ;
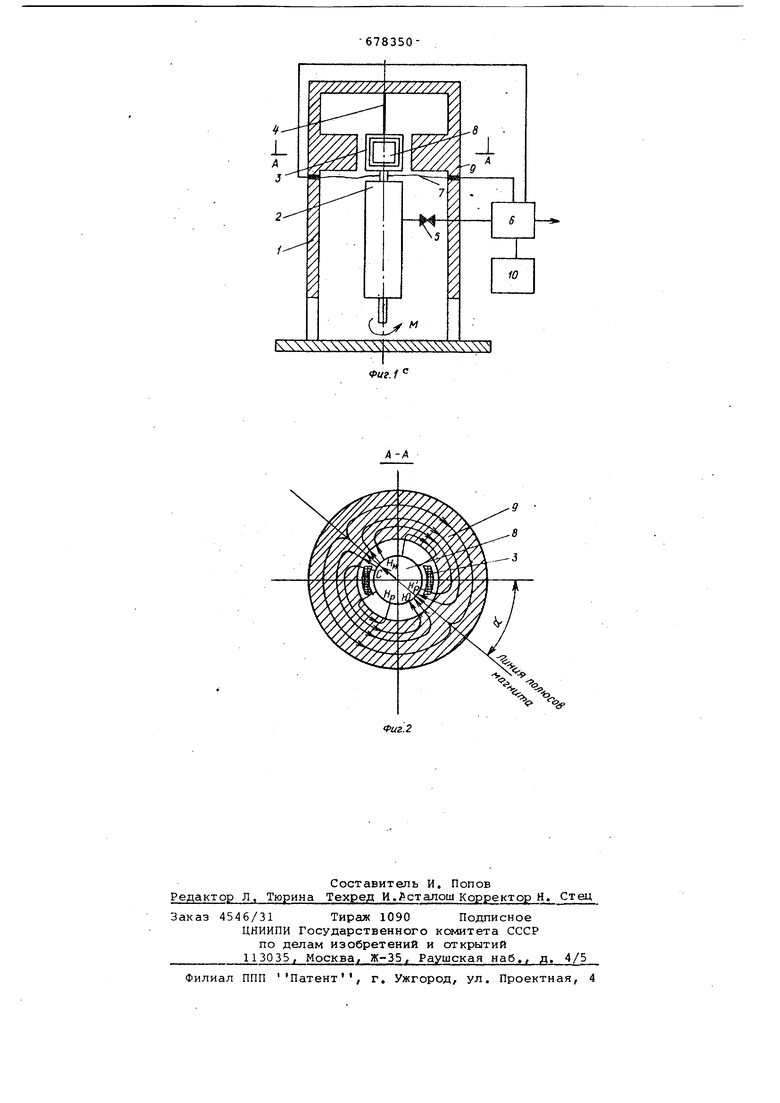
коэффициент преобразова А. ния датчика угла. 1 схематически изображеНа фиг. но предложенное устройство; на фиг.2 - разрез по А-А на фиг. 1.
Устройство состоит из корпуса 1, подвижной части, включающей натяжной- груз 2 и обмотку 3 моментного датчика гальванометрического типа, нитевидного подвеса 4, датчика 5 углового положения подвижной части, усилителя 6 обратной связи, токоподводов 7, постоянного магнита 8, магнитопровода 9 моментного датчика и 3678350 блока 10 для регулировки коэффици- ента усиления усилителя 6. Под действием измеряемого момента М подвижная часть поворачива- ется, вызывая появление сигнала с датчика 5 в виде постоянного тока,/ который через усилитель б обратной5 связи и токопроводы 7 поступает в обмотку 3 моментного датчика, KCJimeH{сируя действие измеряемого момента. Выходным сигналом устройства является ток, проходящий по обмотке10 .моментного датчика, . Статическая характеристика устройства (т.е. зависимость его выходного сигнала от измеряемого момента) при достаточно высоком коэффи- 15 циенте усиления усилителя б, обеспечивающем практически нулевой провис обмотки 3 подвижной части (изменение углового полсзжения рамки, пропорциональное измеряемому моменту) , имеет нелинейный характер. Нелинейность характеристики обусловлена эффектом размагничивания поля Н магнита 8 (см. фиг. 2),составляющей Нр поля Hj, рамки, создаваемым в ней током обратной связи. При этом эффект размагничивания вызывает появление квадратичной нелинейности моментного датчика. Квадратичная нелинейность зависит от углового отклонения сС обмотки 3 от линии полюсов магнита 8 и. может быть скомпенсирована квадратичной нелинейностью моментного датчика, обусловленной провисом обмотки под действием измеряемого момента. Провис обмотки, который пропорционален измеряемому моменту, изменяет коэффициент преобразования моментного датчика гальванометрического типа по закону, соответствующему закону распределения напряженности магнитного поля в зазоре магнитной CHCTeNtj, состоящей из магнита 8 и магнитопровода 9, а именно, по закону косинуса, вызывая тем caNtJM появление квадратичной нелинейности характеристики моментного датчика. Установлено, что знак последней противополсмсен знаку нелинейности от эффекта размагничивания. Полная взаимная компенсация указанных составляющих нелинейности моментного датчика может быть обеспечена путем подбора надлежащего провиса с помощью введения в устройство блока 10 для р у л т н вы .с ле п об фи чи л це к ос с вн № гулировки коэффициента усиления илителя 6, исходя из соотношения К, Р- ду. коэффициент усиления усилителя;коэффициент преобразования моментного датчика; коэффициент нелинейности мсментного датчика, определяеилй эффектом размагничивания;коэффициент преобразова ния датчика угла, В результате введения этой регуовки коэффициента усиления усилия снижается погрешность пропорциоьности устройства и тем самым поается его точность. Формула изобретения Устройство для измерения моментов, ержёицее подвижную часть, установную в подвесе, датчик углового ожения подвижной части, усилитель атной связи с регулировкой коэфиента усиления и моментный датгальванометрического типа, о тчающееся тем, что, с ью повышения точности, регулировкоэффициента усиления усилителя ществлена блоком, реализующим тношение коэффициент усиления усилителя;коэффициент преобразования моментного датчика; коэффициент нелинейности моментного датчика, определяемой эффектом развинчивания;коэффициент преобразования датчика угла. Источники информации, принятые во мание при экспертизе 1.Авторское свидетельство СССР 893315, кл.в 01 L 3/00, 1969, 2,Авторское свидетельство СССР 56494, кл. G 01 U 3/00, 1971,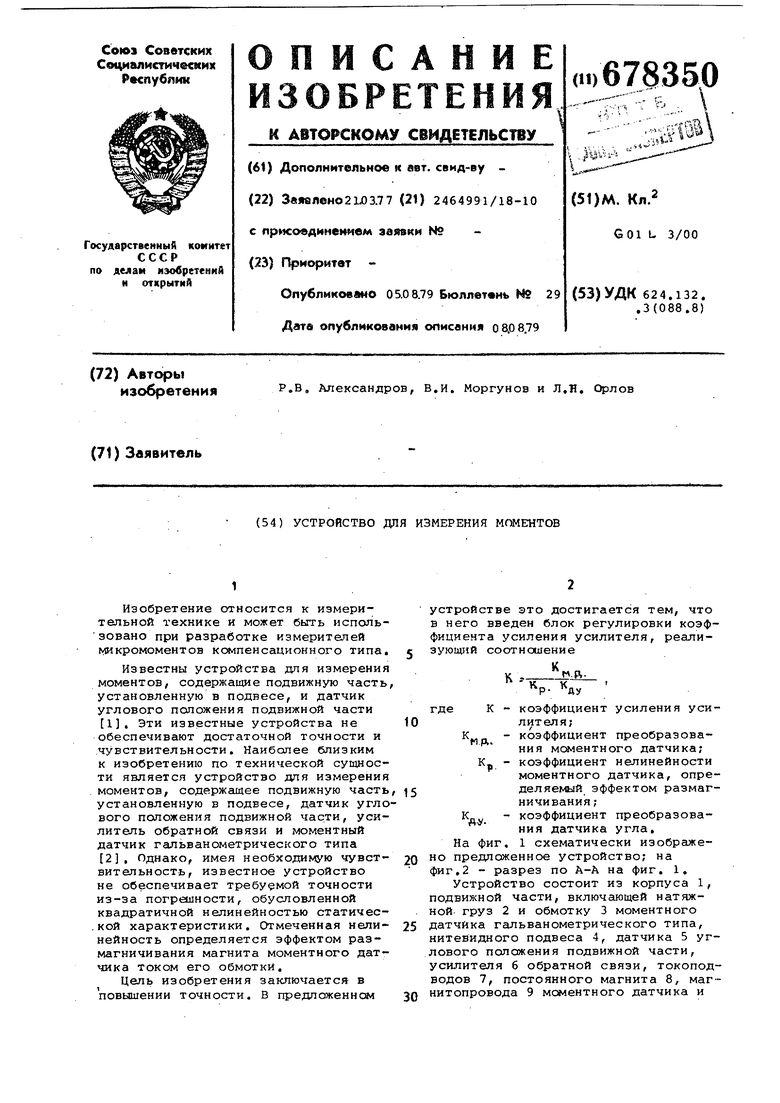
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения моментов | 1978 |
|
SU808883A1 |
| Устройство для испытаний наклономеров | 1978 |
|
SU763685A1 |
| Устройство для измерения момента | 1977 |
|
SU664062A1 |
| Устройство для измерения моментов | 1979 |
|
SU777500A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СМЕЩЕНИЯ НУЛЯ МАЯТНИКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1976 |
|
SU1839855A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ НЕЛИНЕЙНОСТИ ХАРАКТЕРИСТИКИ КОМПЕНСАЦИОННЫХ АКСЕЛЕРОМЕТРОВ С МАГНИТОЭЛЕКТРИЧЕСКИМ ОБРАТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 1985 |
|
SU1344052A1 |
| Наклономер | 1990 |
|
SU1812427A1 |
| Преобразователь механических величин | 1980 |
|
SU851136A1 |
| БИНОКЛЬ СО СТАБИЛИЗИРОВАННЫМ ОПТИЧЕСКИМ ИЗОБРАЖЕНИЕМ | 1995 |
|
RU2082199C1 |
| ОПТИЧЕСКИЙ ДАТЧИК УГЛОВОГО ПЕРЕМЕЩЕНИЯ | 2005 |
|
RU2317523C2 |