1
Изобретение относится к области силоизмерительной техники.
Известный электромагнитный компенсационный моментомер, содержащий чувствительный элемент на упругой подвеске с рамками силовой обратной связи, датчик угла, усилитель компенсации, электромагнитный датчик отрицательной жесткости и регистрирующий прибор, не обеспечивает требуемой точности измерения 1.
Наиболее близким по технической сущности и достигаемому результату к изобретению является устройство для измерения моментов, содержащее корпус, подвижную часть, установленную в опорах корпуса, датчик углового положения подвижной части, связанный со входом усилителя переменного тока электронного блока обратной связи, и моментный датчик постоянного тока, обмотка которого расположена на подвижной части 2.
Недостатком устройства является низкая чувствительность.
Целью изобретения является повышение чувствительности.
Указанная цель достигается за счет того, что датчик углового положения выполнен в виде расположенной на подвижной части обмотки, плоскость которой перпендикулярна к плоскости обмотки моментного
датчика, а электронный блок снабжен логическим устройством, реверсивным ключом, стабилизатором тока и источником питания переменного тока, причем один вход
5 реверсивного ключа связан с выходом логического устройства, соединенного одним входом с источником питания, другой - с выходом стабилизатора тока, при этом моментный датчик соединен с выходом реверсивного ключа и с источником питания, а другой вход логического устройства связан с выходом усилителя.
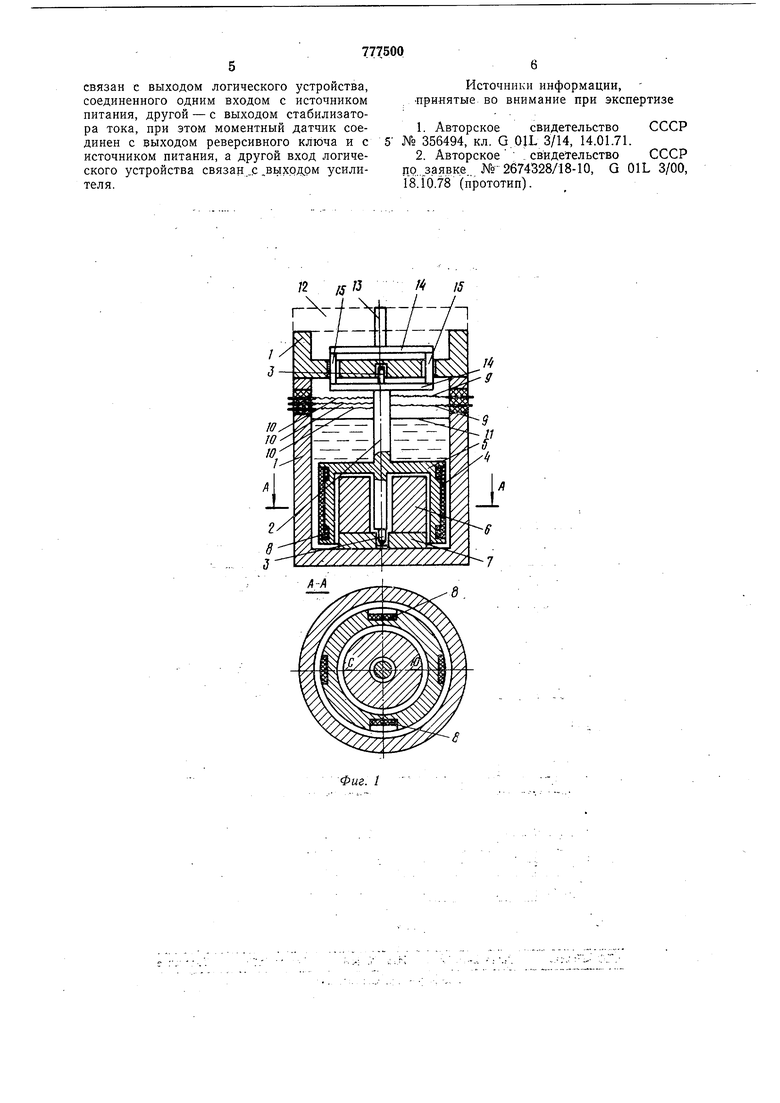
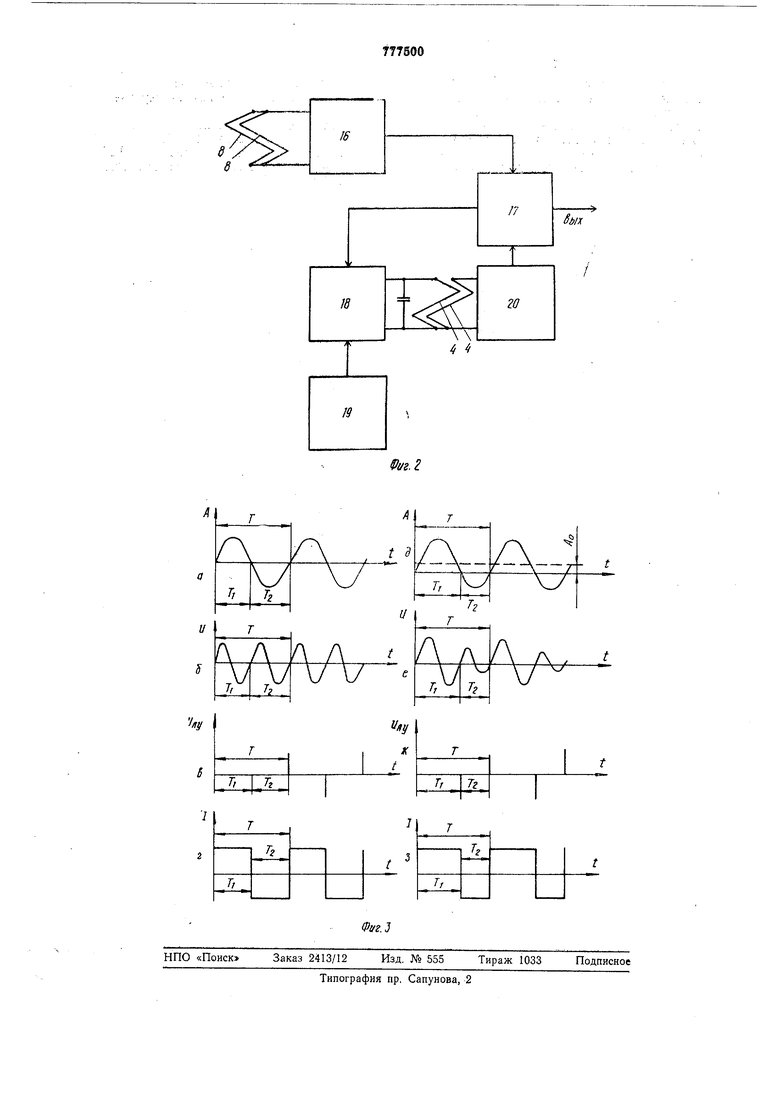
На фиг. 1 представлена конструктивная схема устройства; на фиг. 2 - схема электронного блока обратной связи; на фиг. 3 - графики, поясняющие работу устройства.
Устройство для измерения моментов состоит (см. фиг. 1) из корпуса 1, изготовленного из магнитомягкого материала,поД20 вижной части 2, установленной в опорах скольжения 3, и моментного датчика постоянного тока. Моментный датчик выполнен в виде рамочной двухсекционной обмотки 4, закрепленной в пазах на цилиндрической поверхности колпачка 5, постоянного магнита 6, линия полюсов которого расположена в плоскости чертежа, и немагнитной прокладки 7. Активная часть рамочной обмотки 4, совпадающая с образу30 ющей колпачка 5, расположена по линии
полюсов магнита 6. Устройство солержит датчик углового положения подвижной части, выполненной в виде двухсекционной обмотки 8, расположенной на колпачке 5 подвижной части 2 в плоскости, перпендикулярной к плоскости обмотки моментного датчика. Обмотки 4 и 8 подключены через ленточные токоподводы 9, 10 к электронному блоку обратной связи. Для демпфирования подвижной части 2 корпус 1 частично заполнен жидкостью И. Передача измеряемого микромомента от испытуемого элемента 12 к подвижной части 2 осуществляется через ось 13, два фланца 14, один из которых скреплен с осью 13, а - с подвижной частью 2, и стяжек 15, проходящих через отверстия в корпусе 1. Электронный блок обратной связи (см. фиг. 2) выполнен в виде усилителя переменного тока 16, логического устройства 17 с двумя входами, реверсивного ключа 18, стабилизатора тока 19 и источника питания переменного тока 20.
Логическое устройство 17 связано с реверсивным ключом 18, к которому подключены стабилизатор тока 19 и первая секция обмотки 4 моментного датчика. Первая секция обмотки 4 зашунтирована фильтрующей емкостью, а вторая секция подключена к источнику 20.
Устройство работает следующим образом.
В исходном положении переменный ток источника 20, проходя по второй секции обмотки 4, взаимодействует с полем постоянного магнита 6 и преобразуется в синусоидальный момент, под действием которого подвижная часть 2 совершает угловые колебания вокруг оси вращения. Амплитуда колебаний А (см. фиг. 3,а) определяется величиной тока, коэффициентом преобразования моментного датчика, коэффициентом демпфирования и моментом инерции подвижной части. Вследствие перпендикулярности плоскости обмотки 8 линии полюсов магнита 6 в последней индуцируется гармоническое напряжение U (см. фиг. 3,6) удвоенной частоты- по отношению к частоте колебаний подвижной части 2. Напряжение t/ преобразуется усилителем 16 и поступает на один из входов логического устройства 17, на другой вход которого подается информация об амплитуде колебаний подвижной части 2 от источника 20. Логическое устройство 17 формирует команды i/лу управления реверсивным ключом 18 в моменты, когда напряжение U (см. фиг. 3,6) равно нулю, а его производная положительна (см. фиг. 3,б). Полярность команды определяется знаком производной от амплитуды А колебаний подвижной части 2. Положительные команды формируются при подходах обмотки 8 справа к нейтральной линии магнита 6, которая перпендикулярна линии полюсов и характеризуется нулевым
значением напряженности магнитного поля в зазоре моментного датчика, а отрицательные - при подходах слева. В силу симметричности колебаний обмотки 8 относительно нейтральной линии магнита появление отрицательных импульсов происходит в середине периода Г. следования положительных импульсов ().
Реверсивный ключ 18, коммутируя стабилизатор тока 19, направляет в первую секцию обмотки 4 ток / по закону (см. фиг. 3,г). Моментный датчик в силу отсутствия постоянной составляющей в токе / и наличия шунтирующей емкости практически не прикладывает момента к подвижной части.
Под действием измеряемого момента подвижная часть 2 развернется на угол АО, вызвав смещение обмотки 8 относительно нейтральной линии магнита 6 на ту же величину. В процессе синусоидальных колебаний подвижной части 2 время TI нахождения обмотки 8 слева относительно нейтрали магнита превышает время Тд пребывания ее справа от нейтрали (см. фиг. 3,5). Поэтому напряжение U, индуцированное в обмотке 8, имеет вид, представленный на фиг. 3,е, а команды управления f/л. у логического устройства 17 формируются в соответствии с фиг. 3,ж. Поскольку время TI, в течение которого в первую секцию обмотки 4 направляется ток от стабилизатора 19 через ключ 18 положительной полярности, превышает время Т. подключения тока отрицательной полярности, то в обмотке 4 выделится постоянная составляющая тока, пропорциональна разности TI-TZ (см. фиг. 3,з). Постоянная составляющая тока в обмотке 4 моментного датчика создает момент, который по системе отрицательной обратной связи компенсирует измеряемый момент. Выходная информация устройства в виде широтно-импульсного модулированного сигнала (разности TI-Т) формируется устройством 17.
Формула изобретения
Устройство для измерения моментов, содержащее корпус, подвижную часть, установленную в опорах корпуса, датчик углового положения подвижной части, связанный со входом усилителя переменного тока электронного блока обратной связи, и моментный датчик постоянного тока, обмотка которого расположена на подвижной части, отличающееся тем, что, с целью повышения чувствительности, датчик углового положения выполнен в виде расположенной на подвижпой части обмотки, плоскость которой перпендикулярна к плоскости обмотки моментного датчика, а электронный блок снабжен логическим устройством, реверсивным ключом, стабилизатором тока и источником питания переменного тока, причем один вход реверсивного ключа
связан с выходом логического устройства, соединенного одним входом с источником питания, другой - с выходом стабилизатора тока, при этом моментный датчик соединен с выходом реверсивного ключа и с источником питания, а другой вход логического устройства связан с ,выхрд.рм усилителя.
6
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 356494, кл. G.OIL 3/14, 14.01.71.
2.Авторское свидетельство СССР по заявке №-2674328/18-10, G OIL 3/00, 18.10.78 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| КУРСОВАЯ СИСТЕМА | 2004 |
|
RU2279636C1 |
| Устройство для измерения моментов | 1978 |
|
SU808883A1 |
| ДВУХОСНЫЙ ГИРОСКОПИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВЫХ СКОРОСТЕЙ С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1993 |
|
RU2118796C1 |
| Устройство для измерения моментов | 1977 |
|
SU678350A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРО-ДИФФЕРЕНЦИАЛАМИ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2794720C1 |
| УЛЬТРАЗВУКОВОЕ УСТРОЙСТВО | 1992 |
|
RU2045239C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 2007 |
|
RU2326446C1 |
| Моментный вентильный электродвигатель | 1981 |
|
SU995218A1 |
| РАСТРОВЫЙ ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 2007 |
|
RU2334948C1 |
r
r
J
