СО
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения углового положения объекта | 1990 |
|
SU1760317A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СМЕЩЕНИЯ НУЛЯ МАЯТНИКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1976 |
|
SU1839855A1 |
| МИКРОСИСТЕМНЫЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2450278C2 |
| Устройство для измерения моментов | 1977 |
|
SU678350A1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2005 |
|
RU2291450C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1994 |
|
RU2126161C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2010 |
|
RU2485444C2 |
| Устройство для испытаний наклономеров | 1978 |
|
SU763685A1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2543708C1 |
| АКСЕЛЕРОМЕТР | 1985 |
|
RU2045761C1 |
Использование: высокоточное определение уклонов поверхностей и объектов в гравитационном поле Земли. Сущность изобретения: устройство содержит маятник, установленный в корпусе на горизонтальном упругом подвесе. Датчик угла подключен к инвертирующему входу, нагрузочный резистор -- к неинвертирующему, а датчик момента - к выходу дифференциального усилителя обратной связи. К общей точке дифференциального усилителя обратной связи подключен компенсационный резистор, другим выводом соединенный с нагрузочным резистором, подключенным к выходу датчика момента. Номинал компенсационного резистора зависит от геометрии устройства и свойств упругого подвеса, 2 ил.
Изобретение относится к области измерительной техники и может быть использовано для измерения углов наклона различных поверхностей и объектов в гравитационном поле Земли.
Целью изобретения является упрощение конструкции наклономера и повышение точности за счет уменьшения влияния ошибок, обусловленных погрешностями упругого подвеса.
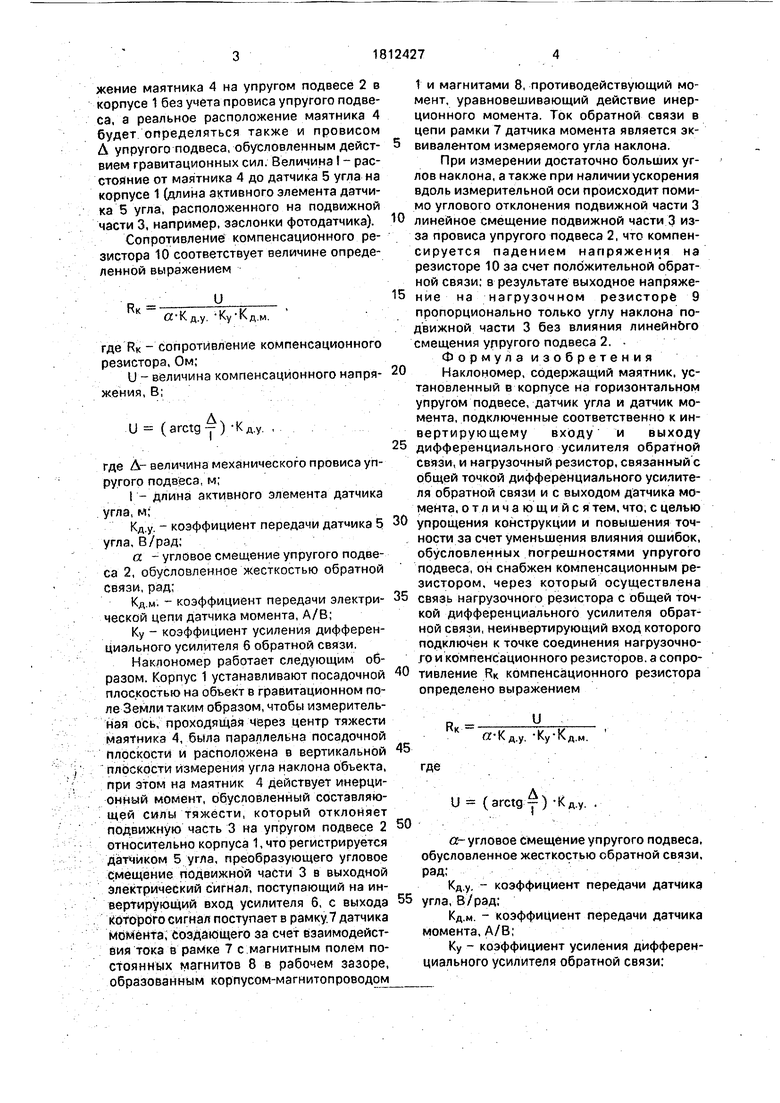
На фиг.1 представлена электрокинематическая схема наклономера; на фиг.2 условно показано расположение элементов в наклономере при измерении угла.
Наклономер содержит корпус-магнито- провод 1, в котором на упругом подвесе 2
установлена подвижная часть 3 с маятником 4, датчик 5 угла, дифференциальный усилитель 6 обратной связи, рамку 7 на подвижной части 3, магниты 8 датчика момента, расположенные на корпусе 1, нагрузочный резистор 9 и компенсационный резистор 10 (расположенный, например, на внешней стороне корпуса). Выход датчика 5 подключен к инвертирующему входу усилителя 6, выход усилителя 6 через рамку 7 и нагрузочный резистор 9 подключен к неинвертирующему входу усилителя 9 и общей точкой усилителя 6.
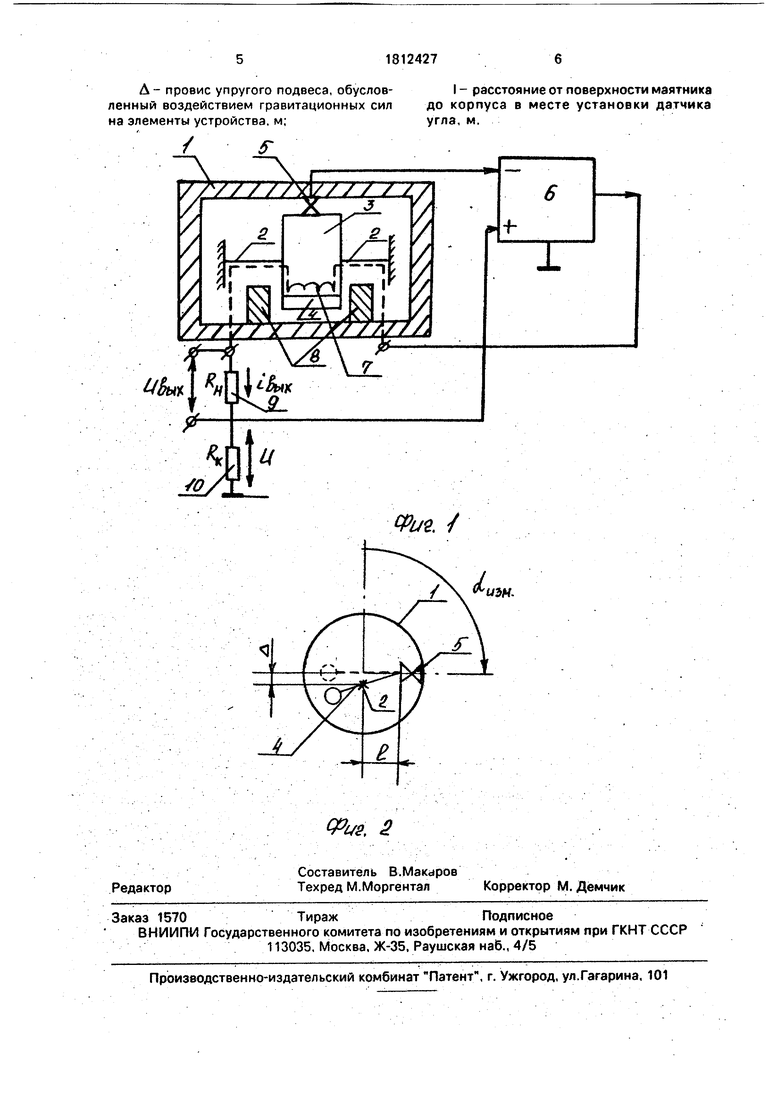
На фиг.2 показан вариант измерения наклономером предельного угла ( «изм 90°), при этом пунктиром показано располоСО
ю
4 Ю х|
жение маятника 4 на упругом подвесе 2 в корпусе 1 без учета провиса упругого подвеса, а реальное расположение маятника 4 будет определяться также и провисом Л упругого подвеса, обусловленным действием гравитационных сил. Величина I - расстояние от маятника 4 до датчика 5 угла на корпусе 1 (длина активного элемента датчика 5 угла, расположенного на подвижной части 3, например, заслонки фотодатчика). Сопротивление компенсационного резистора 10 соответствует величине определенной выражением
RK
U
Ct K д.у. Ку Кд.м.
где RK - сопротивление компенсационного резистора, Ом;
U - величина компенсационного напряжения, В;
U (arctgy) -Кд.у. , .
где Д-величина механического провиса упругого подвеса, м;
Г- длина активного элемента датчика угла,м;
Кд.у. - коэффициент передачи датчика 5 угла, В/рад;
а - угловое смещение упругого подвеса 2, обусловленное жесткостью обратной Связи, рад;
Кд.м, - коэффициент передачи электрической цепи датчика момента, А/В;
Ку - коэффициент усиления дифференциального усилителя 6 обратной связи.
Наклономер работает следующим образом. Корпус 1 устанавливают посадочной плоскостью на обьект в гравитационном поле Земли таким образом, чтобы измерительная ось, проходящая через центр тяжести маятника 4, была параллельна посадочной Плоскости и расположена в вертикальной плоскости измерения угла наклона объекта, при этом на маятник 4 действует инерционный момент, обусловленный составляющей силы тяжести, который отклоняет подвижную часть 3 на упругом подвесе 2 относительно корпуса 1, что регистрируется датчиком 5 угла, преобразующего угловое Смещение подвижной части 3 в выходной электрический сигнал, поступающий на инвертирующий вход усилителя б, с выхода kofopdro си гнал поступает в рамку.7 датчика Момента, создающего за счет взаимодействия тока в рамке 7 с магнитным полем постоянных магнитов 8 в рабочем зазоре, образованным корпусом-магнитопроводом
1 и магнитами 8, противодействующий момент, уравновешивающий действие инерционного момента. Ток обратной связи в цепи рамки 7 датчика момента является эквивалентом измеряемого угла наклона.
При измерении достаточно больших углов наклона, а также при наличии ускорения вдоль измерительной оси происходит помимо углового отклонения подвижной части 3
линейное смещение подвижной части 3 из- за провиса упругого подвеса 2, что компенсируется падением напряжения на резисторе 10 за счет положительной обратной связи; в результате выходное напряжение на нагрузочном резисторе 9 пропорционально только углу наклона подвижной части 3 без влияния линейного смещения упругого подвеса 2, Фор мула изобретен-и я
Наклономер, содержащий маятник, установленный в корпусе на горизонтальном упругом подвесе, датчик угла и датчик момента, подключенные соответственно к ин- вертирующему входу и выходу
дифференциального усилителя обратной связи, и нагрузочный резистор, связанный с общей точкой дифференциального усилителя обратной связи и с выходом датчика момента, отличающийся тем, что, с целью
упрощения конструкции и повышения точности за счет уменьшения влияния ошибок, обусловленных погрешностями упругого подвеса, он снабжен компенсационным резистором, через который осуществлена
связь нагрузочного резистора с общей точкой дифференциального усилителя обратной связи, неинвертирующий вход которого подключен к точке соединения нагрузочного и компенсационного резисторов, а сопротивление RK компенсационного резистора определено выражением
RV
U
45
Кд.у, .м.
где
50
U (arctgj) -Кд.у.
о-угловое смещение упругого подвеса, обусловленное жесткостью обратной связи, рад;
Кд.у. - коэффициент передачи датчика угла, В/рад;
Кд.м. - коэффициент передачи датчика момента, А/В;
Ку - коэффициент усиления дифференциального усилителя обратной связи:
Д- провис упругого подвеса, обусловленный воздействием гравитационных сил на элементы устройства, м;
I - расстояние от поверхности маятника до корпуса в месте установки датчика угла, м.
Фиъ /
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Камен X | |||
| Электронные способы измерений в геодезии | |||
| М.: Недра, 1982, с.73-74 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР Мг1360380,кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
