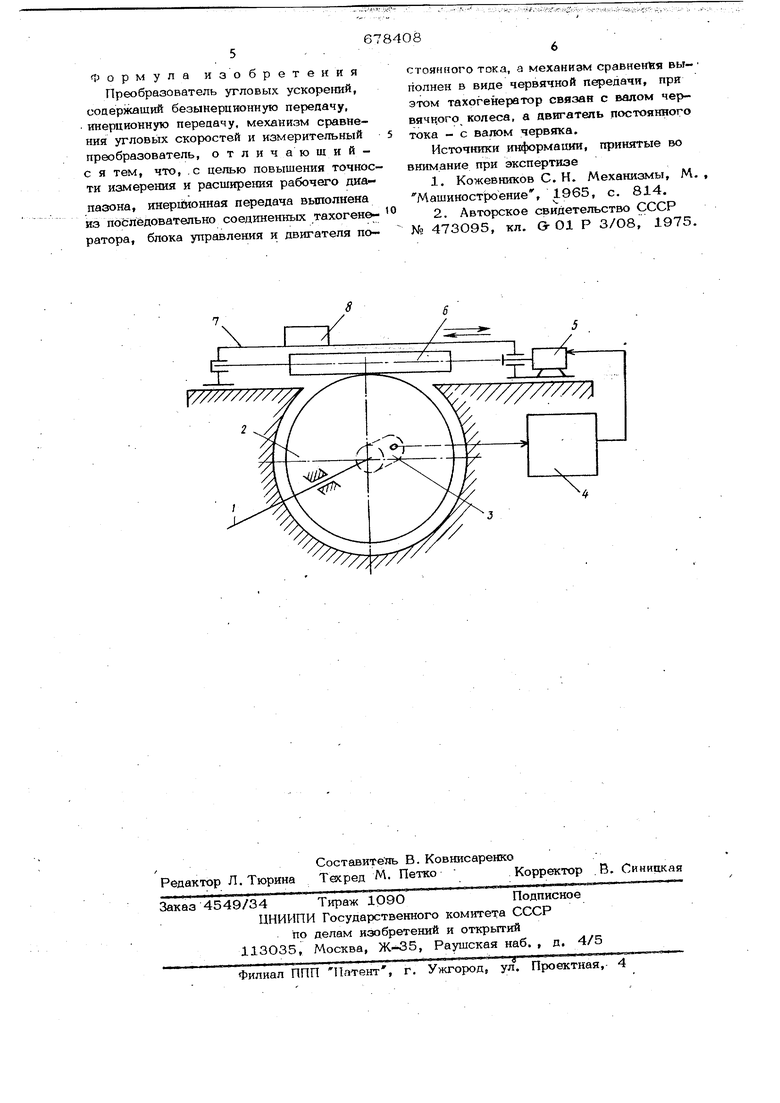
Изобретение относится к облас,ти средств измерения параметров крутильны колебаний вращающихся элементов различ ных машин и механизмов и может бьггь использовано в системах автоматического регулирования аля стабилизации вращательного движения. Известен угловой акселерометр, состоящий из инерционной маховой массы и упругого элемента, соединяющего названную массу с вращающимся объектом. Величина деформации упругого элемента пропорциональна угловому ускорению конт ролируемой системы и может быть определена измерителем любого известного типа ll . Основным недостатком угловых акселерометров является необходимость устройства для передачи измерительного сигнала с вращающегося узла акселерометра на неподвижный регистрируткяций элвУ1ент. Такие устройства име сложную конструкцию, трудоемки в изго.товлении и являются активными источниками дополнительных погрещностей рения. Наиболее бпиасим техническим решением является динамический преобразователь углевых ускорений, который содержит инерционную маховую массу, упругий элемент между ней к контролируемым элементом системы и орган сравнения, представляющий дифференциальный зубчатый механизм 2 . Один из входов сравнивающего- дифференциала соединяется безынерционной передачей с контролируемым валом системы. Второй вход сравнивающего дифференциалаСоединен с инерционной маховой массой и образует совместно с ней и упругим элементом инерционную передачу. Рассогласование входных сигналов по безынерционным и инерционным ветвям пропорционально угловому ускорению и количественно определяется измерителем известного типа на выходе сравнивающего дифференциала. Недостатком такого устройства является наличие большого числа зубчатых зацеплений в его конструкции, что из-за рмеющйхся боковых зазоров и собственных Лоррешяпстбй зацеплений снижает точность измерения параметров крутиль- ных колебаний ко}1трол1фуемой системы, Кроме того, нрименение инерционной маховой массы с постоянным моментом инершш и упругого элемента нерегулиру емой жесткости ограничивает рабочий ди апазой устройства. Целью изобретения является повышени точности измерения и расширение рабочего диапазона динамического преобразователя угловых ускорений. Поставленная цель достигается тем, что инерционная передача выполнена из последовательно соединенных тахогенератора, блока управления и двигателя постоянного тока, а механизм сравнения вьшолнен в виде червячной передачи, червяк которой выполнен с возможностью возвратно-поступательного перемещения вдоль своей оси при этом тахогенератор связан с валом червячного колеса, а двигатель постоянного тока - с валом червяка. На чертеже приведена схема предлагаемого динамического преобразователя уг- .ловых ускорений. Динамический преббразователь угловых ускорений соединяется с контролируемым валом 1 и состоит из червячного колеса 2, неподвижно укрепленного на этом валу, датчика 3, в качестве которого используетс:я тахогенератор , блока 4 управ.ления, исполнительного двигателя 5 постбяННОго тока, удлиненного цилиндрjweского червяка 6, который может возвратно-поступательно перемещаться с подвижной частью корпуса 7, и измершюля 8 линейных ускорений любого известного типа.: При равномерном вращении вала 1 и неподвижно соединенного с ним червячного колеса 2 сигнал от датчика 3 через блок 4 поступает на исполнительный двигатель 5 постоянного тока, который вращает удлиненный цилиндрический червяк 6 Величина напряжения на двигателе 5 зада ется блоком .4 и обеспеч1шает скорость вращения червяка 6, еогласованную со скоростью вращения червячного колеса 2 с учетом их передаточного отношения. . Из меритель 8 линейных ускорений установлен на подвижной части корпуса 7, которая жестко связана в осевом направлении с червяком 6 и может возвратно-поступан теЛьно перемет1аться совместно с.- ним. Следует отметить, что возможны другие конструктивные решения соединения вращающегося червяка 6 с. измерителем 8 обеспечиваюшие достаточную жесткость в осевом направлении (например, использование переходной втулки на валу червяка и подвижного шлицевого соединения между ним и дв1шателем- постоянного тока, что устраняет необходимость в подвижной части корпуса. В рассматриваемом случае, когда контролтфуемый вал 1 вращается равномерно, удлиненный цилиндрический червяк б не изменяет своего осевого , положения и, таким образом, измеритель 8линейных ускорений остается неподвижным. При появлении крутильных колебаний на контролтфуемрм валу 1 сигнал от дат-, чика 3 ускоряется блоком 4 к соответствует средней скорости вращения вала 1. Таким образом, возникает рассогласование в скорости вращения червячного колеса 2, неподвижно сидящего -на валу 1, червяка 6, что вызовет возвратно-поступательное перемещение удлиненного червяка 6 вдоль своей оси совместно с под- вижной частью корпуса 7 и установленным на нем измерителем 8. При этом измеряется линейное ускорение червяка 6, соответствующее величине углового ускорения крутильных колебаний контролируемого вала 1, В случае крутильных колебаний, превышающих по величине возможные, пределы измерений, удлиненный червяк G вьгходит из зацепления с червяч- . ным колесом 2. Кроме того, имеется возможность установки конечных выключателей, связанных с подвижной частью корпуса 7 и отключающих контролируемую систему при достижении заданной амплитуды крутильных колебаний, что представялет интерес для систем автоматического регулирования. Наличие лишь одного червячного зацепления в предлагаемом устройстве, вместо четьфех зубчатых 3(ацеплений в известной конструкции, и ;воаможность устранения (регулировки) бокового зазора радиальный смещением червяка по отношению к червячному колесу обеспечивают повышение точности измерения параметров крутильных колебаний и позволяют в Ю-12 раз расширить диапазон за счет нижнего предела измеряемых колебаний. Кроме того, наличие блока управления позволяет расширить частотный диапазон динамического преобразователя угловых ускорений путем соответствующей настройки сглаживающих фильтров, что особенно важно для адаптивных систем управле1ЕШя..
Формула изобретения Преобразователь угловых ускорений, соцаржащий безынерционную передачу, инерционную церецачу, механизм сравнения угловых скоростей и измерительный преобразователь, отличающийс я тем, что, . с целью повышения точности измерения и расширения рабочего дка
пазона, инеримонная передача выполнена из последовательно соединенных тахогенератора, блока управления и двигателя постоянного тока, а механизм сравнения выполнен в виде червячной передачи, при этом тахогенератор связан с валом червячного колеса, а двигатель постоянного тока - с валом червяка.
Источники информации, принятые во внимание при экспертизе
1.Кожевников С. Н. Механизмы, М. Машиностроение, 1965, с. 814.
2.Авторское свидетельство СССР
№ 473О95, кл. О- 01 Р 3/О8, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания клиноременных передач | 1989 |
|
SU1645869A1 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| Динамический преобразователь угловых ускорений | 1972 |
|
SU473095A1 |
| Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости | 2022 |
|
RU2804762C1 |
| Стенд для динамических испытаний упругих муфт | 1983 |
|
SU1106786A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| Питатель к экструдеру | 1980 |
|
SU926875A1 |
| Буровая установка | 1976 |
|
SU673701A1 |
/
У7/////////-//Л
