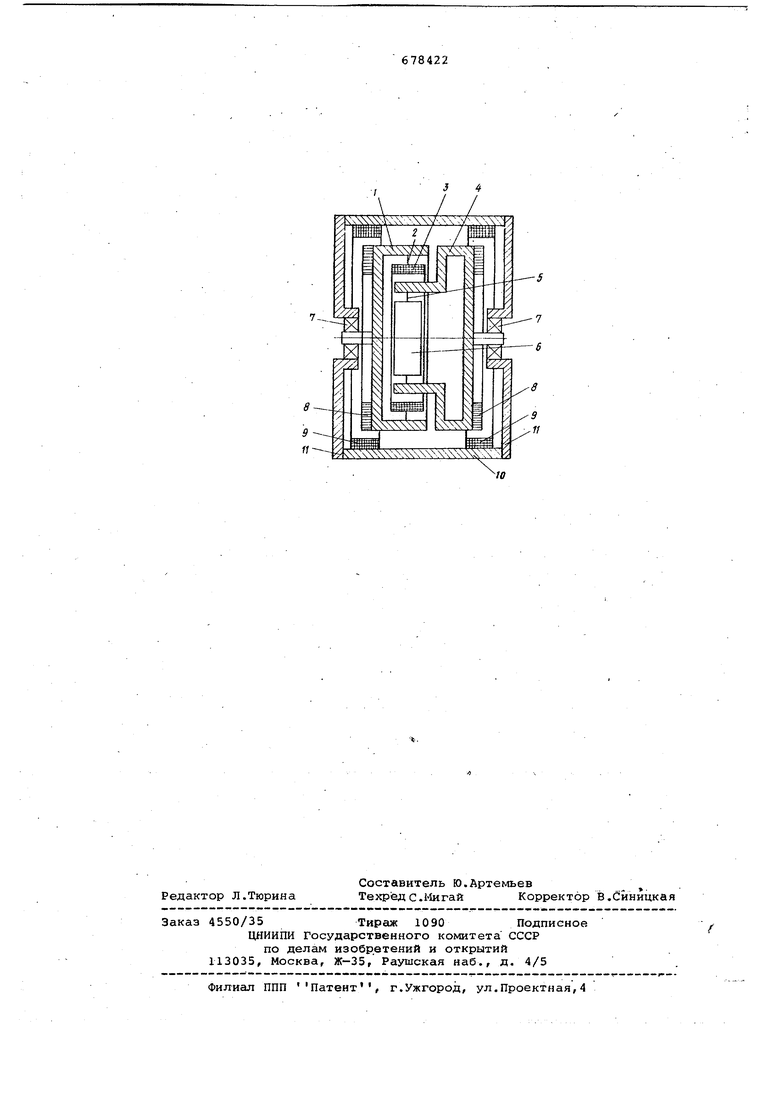
Изобретение относится к гироскопическим приборам - гиротахометрам и может быть использовано в система автоматического управления летатель ных аппаратов. В настоящее время нашли широкое применение вибрационные или динамические настраиваемые гироскопы l . Измерители угловой скорости, работающие на этом принципе, имеют чувс вительный элемент, расположенный внутри быстро вращающегося ротора, который реагирует на измеряемую угловую скорость-. Отличаются также измерители от классических тем, что они могут измерять угловые скорости по двум направлениям, т.е. имеют из мерительную плоскость, сухие моменты трения заменены упругим трением CciMoro материала и имеют невысокую стоимость. Наиболее близким по технической сущности является измеритель угловой скорости, содержащий полый ротор, приводимый во вращение приводом, внутри которого имеются система съема сигнала (датчик угло.вых колебаний) и чувствительный эле мент, .укрепленный через торсионный .подвес 2. Угол колебаний чувствительного- элемента, подвешенного внутри быстро вращающегося ротора на -упругом торсионном подвесе, пропорционален измеряемой угловой скорости, причём амплитуда колебаний характеризует величину вектора угловой скорости, а.фаза колебаний - направление вектора угловой скорости в пространстве. Недостатками известных измерителей угловой скорости являются небольшая чувствительность к малым угловым скоростям и незначительная крутизна выходного сигнала. При измерении угловой скорости величина сигнала будет зависить от величины и скорости отклонения чувствительного элемента относительно системы, съема сигнала. Так как система съема сигнала жестко крепится на роторе и неподвижна относительно чувствительного элемента, скорость отклонения чувствительного элемента относительно этой системы съема будет небольшая, следовательно, будет небольшая крутизна выходного сигнала к чувствительности измерителя. Цель изобретения заключается в . увеличении чувствительности и повышении крутизны выходного сигнала. Указанная царь достигается тем, что полый ротор выполнен из двух концентрично расположенных и снабженных самостоятельными приводами тел враще-ния, ось каждого из которых укреплена в подшипнике, при этом торсионный подвес чувствительного элемента укреплен на одном из тел вращения, а система съема сигнала укреплена через второй торсионный подвес, уста новленный соосно с.первым, на другом теле вращения. Такая конструкция дву частей ротора и крепление на них системы съема сигнала и чувствительного элемента,.увеличивает скорость движения система съёма сигнала относительно чувствительного элемента, в результате чего в системе съема наводится большой сигнал. Применяя принцип суперпозиции, можно показать, что на системе съема наводится сигнал от колебаний чувствительного элемента, равный U K sinsit, где Uj - сигнал, наводимый в системе съема от колебаний чувствительного элемента; К - коэффициент преобразования И - частота вращения ротора; t - время. И на той же системе съеМа наводит ся сигнал от колебаний ее относитель но чувствительного элемента, равный SinSti . . Откладывая U и 3, получим U2--2K siMS.-t, т.е. величина сигнала будет в два раза больше, чем в известном устрой стве. На чертеже показан измеритель уг ловой скорости, общий вид. Измеритель содержит внешнюю част 1, в которой на торсионном подвесе 2 укреплена система съема 3 сигнала выполненная в виде катушки, обхваты вающей внутреннюю часть 4 ротора, внутри которого на торсионном подве се 5 укреплен чувствительный элемен б, обхв енный катушкой 3 съема. Частиl и 4 ротора вращаются в подшипниках 7 с помощью двигателей, ротор 8 которых установлен на частя полого ротора, а статор 9 - на корп се прибора 10, к которому крепятся крышки 11. При действии измеряемой угловой скорости чувствительный элемент б отклоняется от своего нейтрального положения относительно оси торсиона 5 на некоторый угол, совершая за один оборот части 4 ротора полный период колебаний. Одновременно катушка 3 отклоняется на такой же угол относительно оси торсиона 2, но в сторону, противоположную отклонению чувствительного элемента б, и со.зершает за один оборот части 1 ротора полный период колебаний, т.е. катушка съема и чувствительный элемент будут колебаться в противофазё, что увеличивает скорость перемещения катушки съема относительно чувствительного элемента в два раза, увеличивая выходной сигнатг при действии измеряемой угловой, скорости и чувствительность к малым УГЛОВЫМ скоростям, т.е.чувствительность и крутизна выходного сигнала увеличивается в два раза. Формула изобретения Измеритель угловой скорости, содержащий полый ротор, приводимый во вращение приводом, внутри которого размещены система съема си.гнала и чувствительный элемент, укрепленный на торсионном подвесе, отличающийся тем, что, с целью увеличения чувствительности и крутизны выходного сигнала, полый ротор выполнен из двух концентрично расположенных и снабженных самостоятельными приводами тел вращения, ось каждого из которых укреплена в подшипнике, при этом торсионный подвес чувствительного элемента укреплен на одном из тел вращения, а система съема сигнала укреплена через второй торсионный подвес, установленныйсоосно с первым, на другом теле вращения. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР №390359, кл. G 01 С 19/04, 1973. 2.Авторское свидетельство СССР №371515, кл. G 01 Р 9/02, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель угловой скорости | 1977 |
|
SU657247A1 |
| Измеритель угловой скорости | 1978 |
|
SU769435A1 |
| Измеритель угловой скорости | 1976 |
|
SU601617A1 |
| Измеритель угловой скорости | 1976 |
|
SU641343A1 |
| ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 1973 |
|
SU390359A1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 1982 |
|
SU1086889A1 |
| ИЗМЕРИТЕЛЬ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1998 |
|
RU2150087C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ И НАПРАВЛЕНИЯ ГАЗОВОГО ПОТОКА | 1992 |
|
RU2041463C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2276773C2 |
| Измеритель угловой скорости | 1976 |
|
SU587400A1 |