Изобретение относится к приборостроению, в частности к гироскопии, и может быть использовано при разработке стабилизированных платформ и компасов, используемых на морских судах и в авиации.
Известен вибрационный гироскоп с динамически настраиваемым подвесом, содержащий ротор с закрепленными на нем с помощью торсионов чувствительными элементами и датчики положений чувствительных элементов. Чувствительные элементы выполнены в виде замкнутого симметричного кольца, связанного с ротором с помощью торсионов. Датчик положения измеряет амплитуду колебаний чувствительного элемента. Этот гироскоп выбран в качестве прототипа.
Недостатком данного гироскопа является ненадежность, которая вызывается рядом трудно решаемых конструктивных и технологических проблем, к которым относятся:
исключение радиального биения подшипников ротора;
обеспечение равномерности частоты вращения ротора с точностью до тысячных долей оборота;
обеспечение постоянства температуры в зоне расположения чувствительных элементов с точностью до сотых градуса;
обеспечение высокой механической стабильности материала, используемого для изготовления чувствительных элементов.
Высокие требования к конструкции и технологии обусловлены формированием полезного сигнала, основывающегося на амплитудной модуляции, которая требует обеспечения прецизионной резонансной динамической настройки чувствительного элемента, сохраняющей свое состояние в течение всего времени эксплуатации и хранения.
Цель изобретения повышение надежности вибрационного гироскопа.
Поставленная цель достигается тем, что в вибрационном гироскопе, содержащем ротор с закрепленными на нем с помощью торсионов чувствительными элементами и датчики положений чувствительных элементов, чувствительные элементы выполнены в виде одинаковых грузов, расположенных равномерно по окружности вокруг оси ротора с возможностью угловых колебаний в плоскостях, проходящих через ось ротора, причем датчики положений в плоскостях, проходящих через ось ротора, и датчики положения в плоскости вращения ротора соединены через устройство согласования частот с фазовым детектором, выход которого является выходом гироскопа.
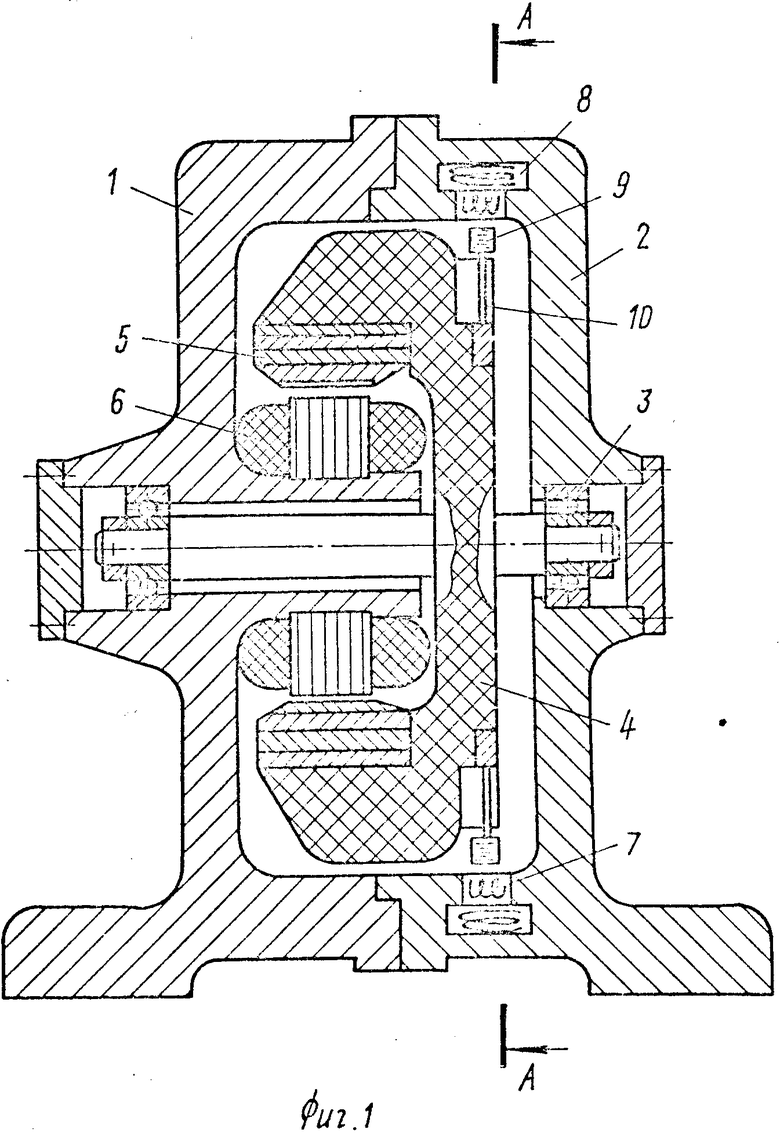
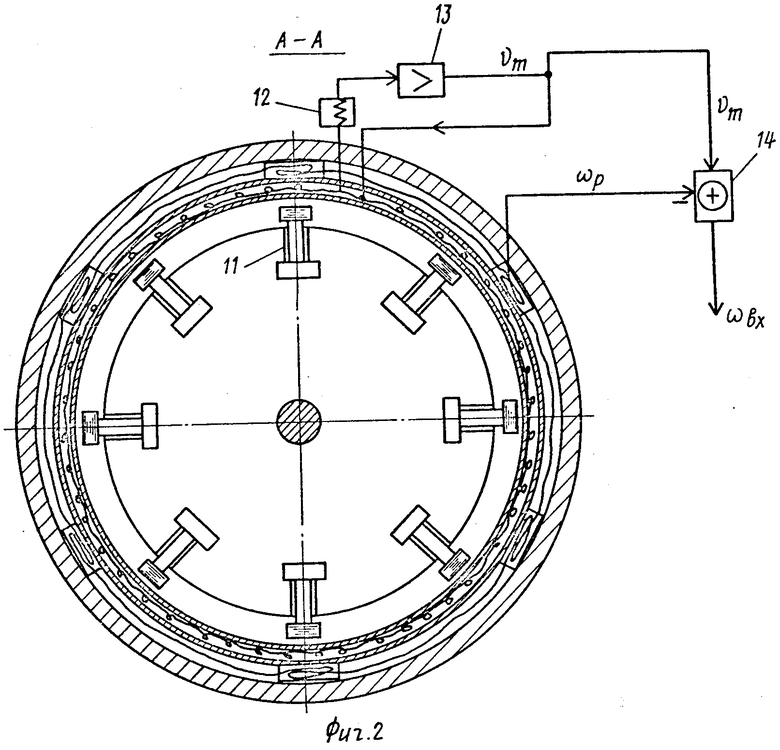
На фиг. 1 изображен гироскоп, общий вид; на фиг. 2 сечение А-А на фиг. 1 со схемой функциональной; на фиг. 3 расчетная схема.
Гироскоп содержит корпус 1, крышки 2, между которыми в подшипниках 3 установлен ротор 4 с закрепленным внутри него магнитопроводом 5, взаимодействующим со статорной обмоткой 6. Внутри корпуса установлены датчики положений 7, лежащие в плоскостях, проходящих через ось ротора, а по наружной поверхности этих датчиков положений установлены датчики положения 8, лежащие в плоскости вращения ротора. Датчики положения 8 выполнены в виде многополюсной катушки, оси полюсов которой расположены в плоскости вращения ротора. Чувствительные элементы выполнены в виде одинаковых магнитных грузов 9, расположенных равномерно на единой окружности и закрепленных на роторе 4 с помощью торсионов 10 с возможностью угловых колебаний в плоскостях, проходящих через ось ротора. На торце ротора выполнены пазы 11 для закрепления торсионов 10. Центр тяжести грузов 9 при радиально вытянутых торсионах 10 проходит через витки датчиков положений 7 и оси полюсов датчиков положений 8. Датчик положений 7 соединен через устройство согласования частот 12 с электронным усилителем 13 и фазовым детектором 14. Ко второму входу фазового детектора подключен датчик положения 8. Выход фазового детектора 14 является выходом гироскопа.
Вибрационный гироскоп работает следующим образом. На датчики положения 7 с электронного усилителя 13 подается кратковременный электрический импульс, который отклоняет грузы 9 на определенный угол от своего первоначального положения. При этом тангенциальная составляющая центробежной силы, возникающая при вращении ротора 4, стремится возвратить грузы 9 в исходное положение. Это обуславливает возникновение угловых колебаний грузов 9. Исключение затухания колебаний грузов 9 предотвращается целью регенеративной обратной связи. Датчики положения 7 совмещают в себе функцию измерителя частоты колебаний и датчика момента цепи регенеративной обратной связи. Подбором коэффициента усиления усилителя 13 выбирают глубину обратной связи и регулируют угол колебания груза 9. Выработка значений частоты вращения ротора 4 осуществляется при помощи датчиков положения 8. Вырабатываемые значения частоты колебаний грузов 9 и частоты вращения ротора 4 поступают в фазовый детектор 14, где происходит их вычитание и вырабатывается частота, пропорциональная измеряемой угловой скорости.
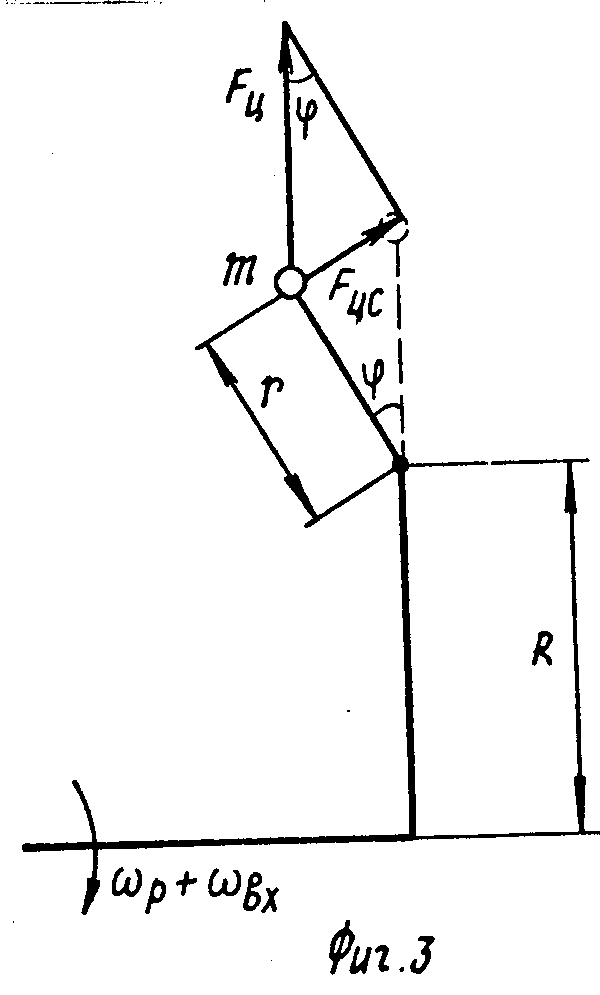
Таким образом, изобретение основывается на эффекте изменения частоты автоколебаний чувствительного элемента при изменении абсолютной частоты вращения ротора 4. Расчетная схема определения измеряемой угловой скорости представлена на фиг. 3, где приняты обозначения:
Fц центральная сила, действующая на постоянные магниты;
m масса постоянного магнита;
r расстояние между линией заделки торсиона и центром массы чувствительного элемента;
R расстояние от линии заделки торсиона до оси вращения ротора;
ϕ угол отклонения чувствительного элемента;
wp угловая скорость вращения ротора;
wвx измеряемая угловая скорость;
Fцτ тангенциальная составляющая центробежной силы, действующая на чувствительный элемент;
Fц m(R + r cos ϕ) (wp + wвx)2 ≈
≈ m(R + r) (wp + wвx)2 (1)
ϕ малая величина
Fцτ=Fц˙sinϕ=Fц˙ϕ (2)
Mцτ=Fцτ r m (R + r) r (wp + wвx)2 ϕ, (3)
где Mцτ момент, развиваемый тангенциальной составляющей центробежной силы, относительно линии заделки торсиона.
Момент инерции маятника
Mи= -(Im+mr2) (5)
(5)
где mr2 момент инерции математического маятника;
Im момент инерции маятника относительно его центра масс. Вводим обозначение rэ, которое используется в качестве приведенного значения плеча чувствительной массы
r (5)
(5)
Выражение (4) запишется в виде
Mи= -mr (6)
(6)
Для обеспечения баланса моментов необходимо
Mцτ + Mu 0 (7)
Подставив в выражение (7) значения (4) и (3), получим
mr + (R+r)m·r(wp+wвх)2ϕ 0 (8)
+ (R+r)m·r(wp+wвх)2ϕ 0 (8)
Из уравнения (8) определяется частота собственных колебаний чувствительного элемента
νm= (wp+wвх)
Таким образом, частота собственных колебаний νm чувствительного элемента пропорциональна сумме угловой скорости вращения ротора и измеряемой угловой скорости.
Выработка значений νm и wp позволяет определить измеряемую угловую скорость wвx.
Частотный характер выходного сигнала, фаза которого пропорциональна интегралу от абсолютной угловой скорости, исключает влияние изменений резонансной настройки, повышая тем самым надежность гироскопа. Требования к стабильности температуры, стабильности положения оси вращения ротора и точности частоты его вращения снижаются, так как влияние этих факторов не отражается на крутизне выходного сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СБОРКИ ГИРОСКОПОВ И ВИБРАЦИОННЫЙ ГИРОСКОП | 2007 |
|
RU2334946C1 |
| Способ непрерывного съёма навигационной информации с кориолисова вибрационного гироскопа | 2016 |
|
RU2662456C2 |
| Способ компенсации погрешности от углового ускорения основания для кориолисова вибрационного гироскопа с непрерывным съёмом навигационной информации | 2016 |
|
RU2659097C2 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2004 |
|
RU2279634C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ И ВИБРАЦИОННЫЙ ГИРОСКОП ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334197C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РОТОРА МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ПО ОСИ ВОЗБУЖДЕНИЯ ПЕРВИЧНЫХ КОЛЕБАНИЙ | 2006 |
|
RU2319928C2 |
| Интегральный микромеханический гироскоп | 2021 |
|
RU2778622C1 |
| ДАТЧИК ИНЕРЦИАЛЬНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2119645C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1988 |
|
RU2101679C1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 2015 |
|
RU2577553C1 |
ВИБРАЦИОННЫЙ ГИРОСКОП, содержащий ротор с закрепленными на нем с помощью торсионов чувствительными элементами и датчики положений чувствительных элементов, отличающийся тем, что, с целью повышения его надежности, чувствительные элементы выполнены в виде одинаковых грузов, расположенных равномерно по окружности вокруг оси ротора с возможностью угловых колебаний в плоскостях, проходящих через ось ротора, причем датчики положений в плоскостях, проходящих через ось ротора, и датчики положения в плоскости вращения ротора соединены через устройство согласования частот с фазовым детектором, выход которого является выходом гироскопа.
| Брозгуль Л.И | |||
| и Смирнов Е.Л | |||
| "Вибрационные гироскопы", Судпромгиз, Л., 1970, с.108. |
