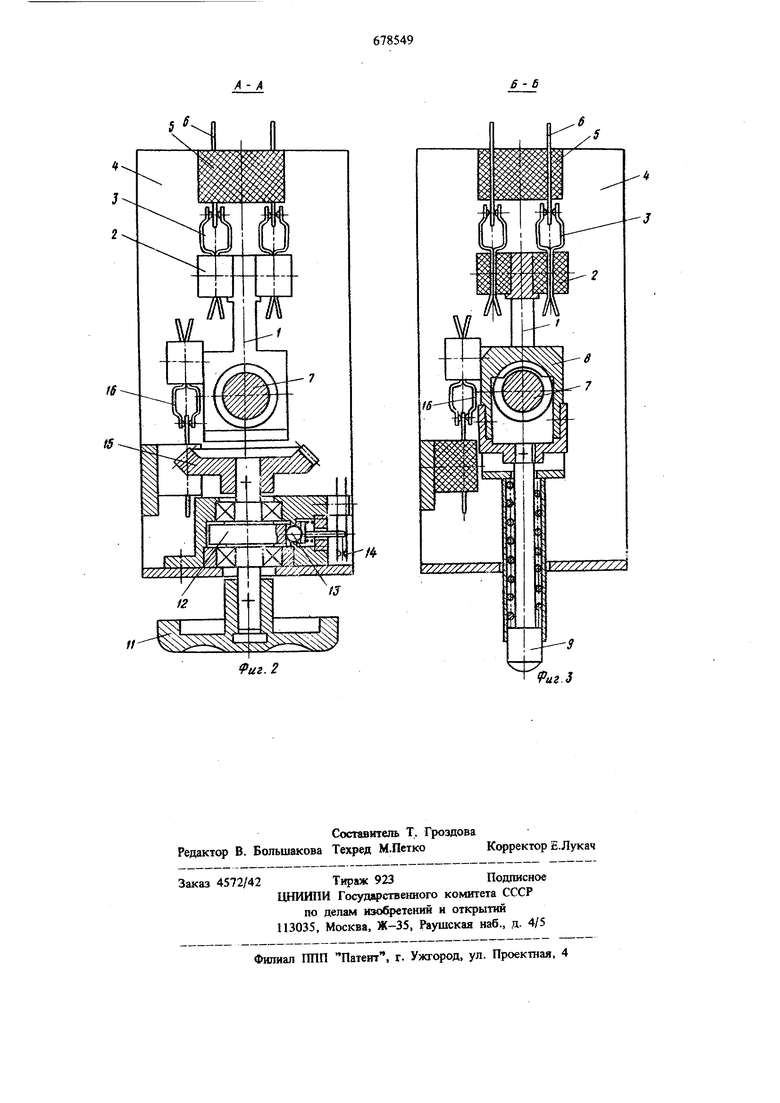
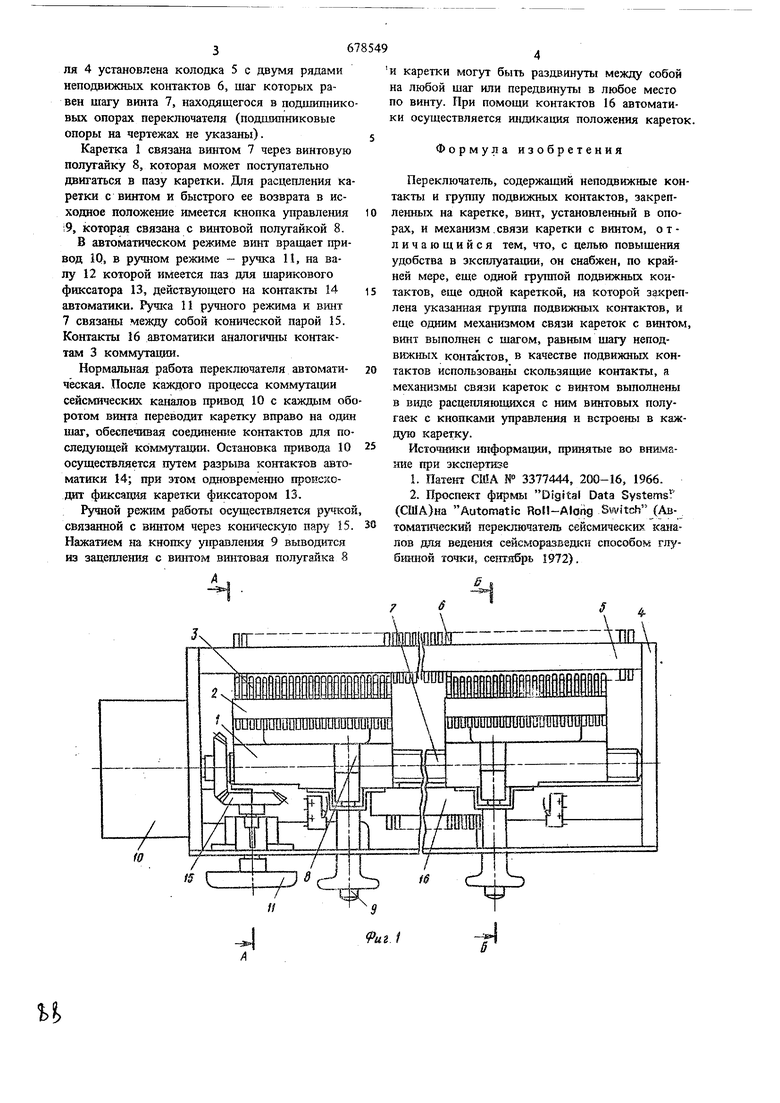
Изобретение относится к электромеханически устройствам и может быть применено для сейсморазведки. Известны переключатели, состоящие из плоской панели с рядами контактш.1Х гнезд и подвижной панели со штырьковыми контактами. Панель закреплена на каретке, перемещаемой с помощью рейки и ведущей шестерни. Кроме того, имеется устройство, которое прижимает каретку и вводит в зацепление контакты И. Известны также переключатели, содержащие неподвижные контакты и группу подвижных контактов, закрепленных на каретке, винт, установленный в опорах, механизм связи каретки с винтом 2. Известные переключатели неудсЛиы в эксплу тации. Целью изобретения является повышение удоб ства в эксплуатации, т. е. обеспечение возможности быстрого перевода кареток вдоль неподвижных контактов при проверке линии контактов иа утечку и возврата кареток в исходаое положение, а также разведения кареток между собой при симметричной расстановке сейсми)ческой косы и сохранешм между каретками за1данного интервала во время работы. С этой целью переключатель, содержащий неподвижные контакте и группу подвижных контактов, закреплйшых на каретке, винт, установленный в опорах и механизм связи каретки с винтем,снабжен,по крайней мере,еще одной группой подвижных контактов.еще одной кареткой,на которой закреплена указшшая группа подвижных контактов,и еще одним механизмом связи кареток с винтол,, винт выполнен с шагом, равньпи шагу неподвижных контактов, а в качестве подвижных контактов использованы скользящие контакты, я механизмы связи кареток с винтом выполнены в виде расцепляющихся с ним винтовых полугаек с кнопками )г1фавления и встроены в каждую каретку. На фиг. 1 изображен переключатель в плане; на фиг. 2 - разрез А-А фет. 1; на фиг. 3 разрез Б-Б фиг. 1. Переключатель состонт из двух кареток 1, иа которых закреплены по дае колодки 2 с группой подвижных контактов 3, которые выполнены пружинными. На корпусе переключатеЛЯ 4 установлена колодка 5 с двумя рядами неподвижных контактов 6, шаг которых равен шагу винта 7, находящегося в подштннко вых опорах переключателя (подшипниковые опоры на чертежах не указаны). Каретка 1 связана винтом 7 через винтовую полугайку 8, которая может поступательно двигаться в пазу каретки. Для расцепления ка ретки с винтом и быстрого ее возврата в исходное положение имеется кнопка управления ,9, которая связана с винтовой полугайкой 8. В автоматическом режиме винт вращает привод JQ, в ручном режиме - ручка 11, на валу 12 которой имеется паз для шарикового фиксатора 13, действующего на контакты 14 автоматики. Рушса 11 ручного режима и винт 7 связаны между собой конической парой 15. Контакты 16 автоматики аналогич1п 1 контактам 3 коммутации. Нормальная работа переключателя автоматическая. После каждого процесса коммутации сейсмических каналов привод 10 с каждым об ротом винта переводит каретку вправо на один шаг, обеспечивая соединение контактов для последующей коммутации. Остановка привода 10 осуществляется путем разрыва контактов автоматики 14; при этом одновременно происходят фиксад 1Я каретки фиксатором 13. Ручной режим работы осуществляется ручкой связанной с вшпом через коническую пару 15. Нажатием на кнопку управления 9 выводится из зацепления с вшггом винтовая полугайка 8 ЛГ ж- и каретки могут быть раздвинуты между собой на любой шаг или передвинуты в любое место по винту. При помощи контактов 16 автоматики осуществляется индикация положения кареток. Формула изобретения Переключатель, содержащий неподвижные контакты и группу подвижных контактов, закрепленных на каретке, винт, установленный в опорах, н механизм.связи каретки с винтом, отличающийся тем, что, с целью повыщения удобства в зксплуатации, он снабжен, по крайней мере, еще одной группой подвижных контактов, еще одной кареткой, на которой закреплена указанная группа подвижных контактов, и еще одним механизмом связи кареток с винтом, винт выполнен с щагом, равным шагу неподвижных контактов, в качестве подвижных контактов использовань скользящие контакты, а механизмы связи кареток с винтом выполнены в виде расцеяляюищхся с ним винтовых полугаек с кнопками управления и встроены в каждую каретку. Источники шгформации, принятые во внимание при экспертизе 1.Патент США JP 3377444, 200-16, 1966. 2.Проспект фирмы Digital Data Systems (США)на Automatic RoM-Alorig Switch (Автомат1Иеский переключатель сейсмических каналов для ведения сейсморазведки способом глубинной точки, сеетябрь 1972). -
«-1
.2
Раг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разметки | 1982 |
|
SU1130455A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ЭЛАСТИЧНЫЙ ВИНТОВОЙ МЕХАНИЗМ | 1995 |
|
RU2140591C1 |
| УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ ВИНТОВЫХ МЕХАНИЗМОВ | 1972 |
|
SU426129A1 |
| Устройство для укладки проволоки | 1981 |
|
SU1005975A1 |
| ТЕАТРАЛЬНАЯ СЦЕНА | 1970 |
|
SU272521A1 |
| Шариковый винтовой механизм | 1985 |
|
SU1263947A1 |
| Устройство для поштучной выдачи плоских заготовок | 1987 |
|
SU1426681A1 |
| ВИНТОВОЙ МЕХАНИЗМ | 1993 |
|
RU2090792C1 |
| Рельсорезный станок | 1982 |
|
SU1057209A1 |
| ТРАНСПОРТЕР ДЛЯ ПЕРЕМЕЩЕНИЯ ДЛИННОМЕРНЫХ ИЗДЕЛИЙ | 2002 |
|
RU2225825C2 |