N3
О)
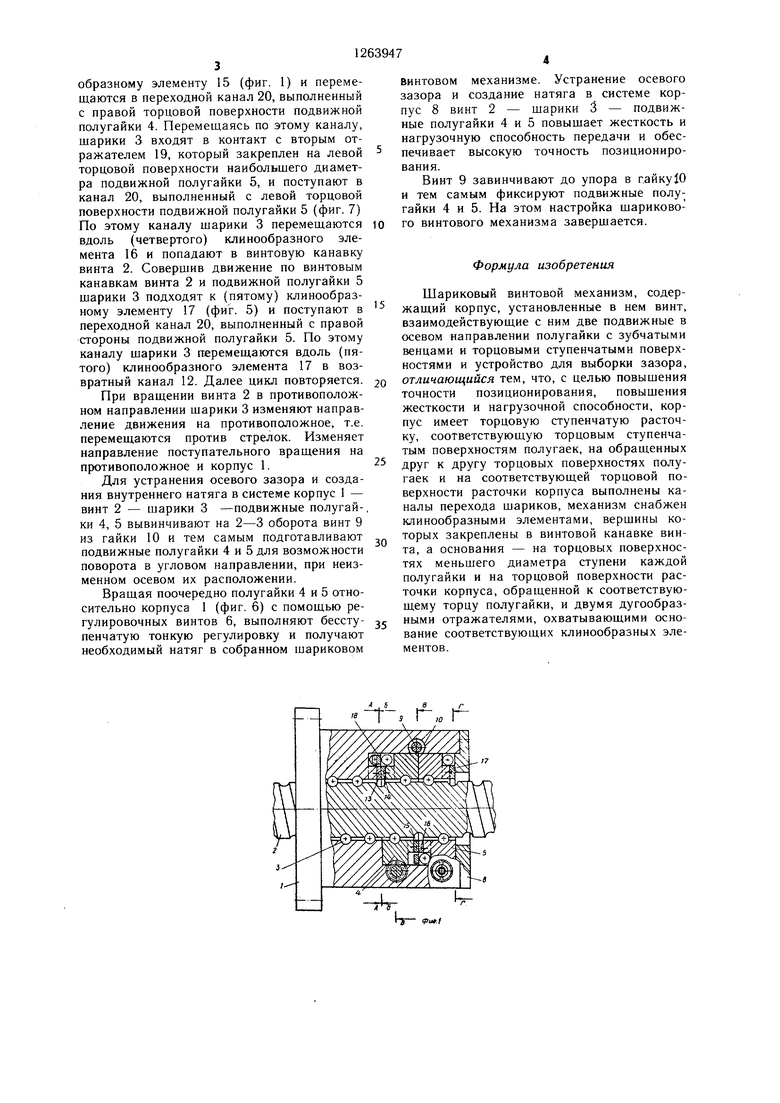
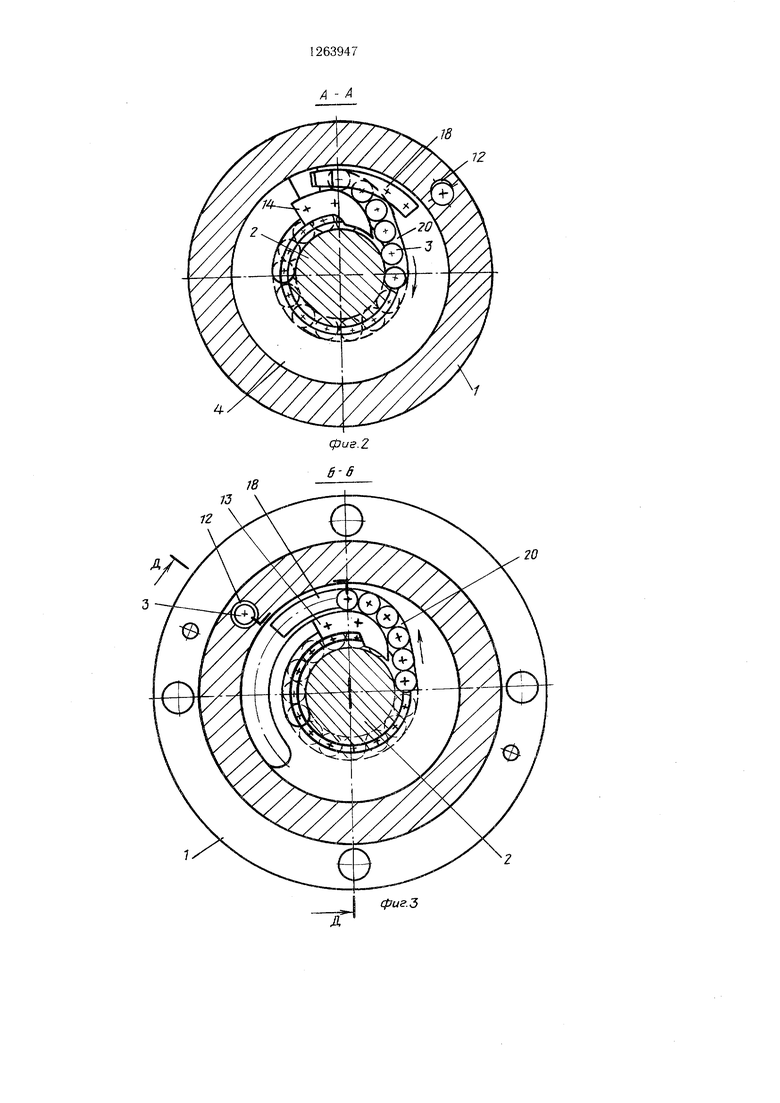
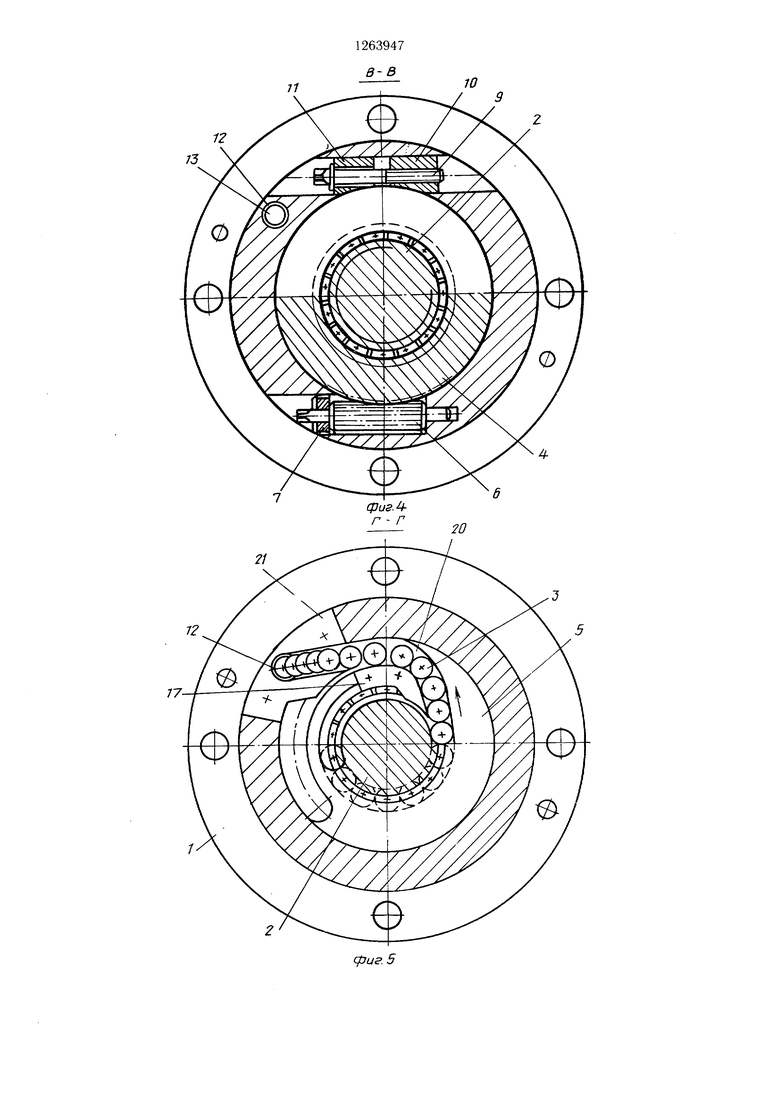
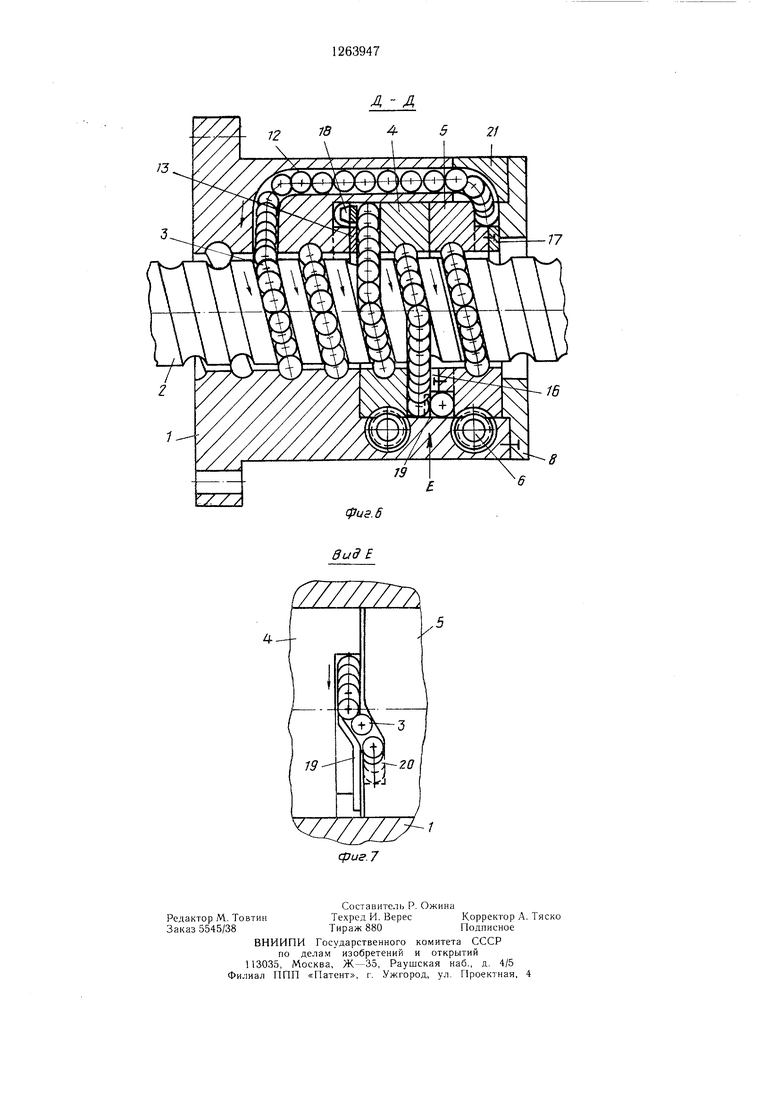
со со 4 Изобретение относится к машиностроению, непосредственно к передачам, преобразующим вращательное движение в поступательное, в частности в приводах подач металлорежущих станков. Цель изобретения - повышение точности позиционирования, жесткости и нагрузочной способности за счет выполнения торцовой ступенчатой расточки в корпусе и снабжения механизма клинообразными элементами и дугообразными отражателями. На фиг. 1 изображен шариковый винтовой механизм, частичный продольный разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - разрез Г-Г на фиг. 1; на фиг. 6 - разрез Д-Д на фиг. 3; на фиг. 7 - узел перемещения щариков между подвижными полугайками, вид Е на фиг. 6. Шариковый винтовой механизм содержит корпус 1 (фиг. 1), установленные в нем винт 2, шарики 3, две подвижные полугайки 4 и 5 с зубчатыми венцами на образующих поверхностях и винтовыми устройствами поворота подвижных полугаек, каждое из которых выполнено в виде винта 6, зафиксированного в корпусе 1 от осевого смещения гайкой 7 (фиг. 4). На внутренних поверхностях корпуса 1 и подвижных полугаек 4, 5 под щарики 3 выполнены винтовые канавки, которые имеют щаг и глубину, аналогичные винтовой канавке винта 2 {фиг. 1, 6). Подвижные полугайки 4 и 5 размещены в расточке корпуса 1 с возможностью поворота вокруг оси симметрии и зафиксированы от осевого смещения крышкой 8. Для предотвращения самопроизвольного поворота подвижных полугаек 4 и 5 предусмотрен механизм их фиксации, выполненный в виде винта 9, гайки 10 и втулки 11, причем гайка 10 и втулка 11 выполнены с криволинейными поверхностями, охватывающими образующие поверхности подвижных полугаек 4 и 5 (фиг. 4). Для обеспечения перемещения шариков 3 по замкнутому контуру в корпусе 1 выполнен возвратный канал 2. По наименьщему диаметру торцовой поверхности расточки корпуса 1 закреплено основание клинообразного элемента 13. Такие же клинообразные элементы 14-17 закреплены основаниями на торцовых поверхностях меньшего диаметра ступени каждой подвижной полугайки 4 и 5 и на торцовой поверхности расточки корпуса. Вершины клинообразных элементов 13-17 закреплены в винтовой канавке винта 2. На торцовых поверхностях большего диаметра подвижных полугаек 4 и 5, обращенных в сторону торцовой поверхности расточки корпуса 1, закреплены дугообразные отражатели 18 и 19. При ЭТОМ на обеих торцовых поверхностях подвижных полугаек 4 и 5 и на торцовой поверхности расточки корпуса 1 выполнены дугообразные каналы 20 перехода шариков, которые не отличаются между собой по форме. Размещение канала 20 по одному торцу каждой из подвижных полугаек 4 и 5 смещено на 180° от размещения такого же дугообразного канала по другому торцу подвижной полугайки. Крепление клинообразных элементов 13- 17 и дугообразных отражателей 18, 19 выполнено одинаковым. Таким образом, в сборе с клинообразными элементами 13-17 и отражателями 18, 19 подвижные полугайки 4, 5 являются взаимозаменяемыми. При установке подвижных полугаек т 4 и 5 в корпус 1 следят за тем, чтобы отражатели 18, 19 были обращены в сторону торцовой поверхности расточки корпуса 1. Со стороны крышки 8 в корпусе 1 установлен вкладыш 21, в котором выполнен дугообразный участок возвратного канала 12 (фиг. 5 и 6, стрелками показано направление движения шариков). Шариковый винтовой механизм работает следующим образом. В исходном положении механизм винт 9 завинчивают до упора в гайку 10 и тем самым обеспечивают фиксацию настроечных гаек 4 и 5 от самопроизвольного поворота. При вращении винта 2 корпус 1 приобретает поступательное перемещение, которое сопровождается перемещением шариков 3 по винтовым канавкам корпуса 1, винта 2, подвижных полу гаек 4 и 5, а также по возвратному каналу 12 и каналу 20 перехода шариков. При этом, если, например, шарики 3 перемещаются по возвратному каналу 12 влево (фиг. 6), то, попадая на винт 2, они опускаются по видимой его стороне и поднимаются по невидимой на фиг. 6 стороне этого винта. При подходе (к первому) клинообразному элементу 1, основание которого закреплено по наименьшему диаметру торцовой поверхности расточки корпуса, шарики 3 входят в контакт с его вершиной и .попадают в переходной канал 20, выполненный на торцовой поверхности расточки корпуса 1 (фиг. 3) и, входя в контакт с первым отражателем 18, который закреплен на левой торцовой поверхности подвижной полугайки 4, переходят в канал 20, выполненный по левому торцу подвижной полугайки 4 (фиг. 6). По этому каналу шарики 3, перемещаясь по часовой стрелке вдоль (второго) клинообразного элемента 14 (закрепленные на левой наименьшего диаметра торцовой поверхности подвижной полугайки 4), попадают в винтовую канавку винта 2 (фиг. 2). Совершив движение по винтовым канавкам винта 2 и подвижной полугайки 4, шарики 3 подходят к (третьему) клинообразному элементу 15 (фиг. 1) и переме щаются в переходной канал 20, выполненный с правой торцовой поверхности подвижной полугайки 4. Перемещаясь по этому каналу, шарики 3 входят в контакт с вторым OTj ражателем 19, который закреплен на левой торцовой поверхности наибольшего диаметра подвижной полугайки 5, и поступают в канал 20, выполненный с левой торцовой поверхности подвижной полугайки 5 (фиг. 7) По этому каналу шарики 3 перемешаются вдоль (четвертого) клинообразного элемента 16 и попадают в винтовую канавку винта 2. Совершив движение по винтовым канавкам винта 2 и подвижной полугайки 5 шарики 3 подходят к (пятому) клинообразному элементу 17 (фиг. 5) и поступают в переходной канал 20, выполненный с правой стороны подвижной полугайки 5. По этому каналу шарики 3 перемещаются вдоль (пятого) клинообразного элемента 17 в J IIWI rlllV Vy V J-tl Ц-ЧЛ. J-.я ..------- -вратный канал 12. Далее цикл повторяется. fп. При врашенни винта 2 в противоположном направлении шарики 3 изменяют направление движения на противоположное, т.е. перемещаются против стрелок. Изменяет направление поступательного вращения на противоположное и корпус 1. Для устранения осевого зазора и создания внутреннего натяга в системе корпус 1 - винт 2 - шарики 3 -подвижные полугайки 4, 5 вывинчивают на 2-3 оборота винт 9 из гайки 10 и тем самым подготавливают подвижные полугайки 4 и 5 для возможности поворота в угловом направлении, при неизменном осевом их расположении. Вращая поочередно полугайки 4 и 5 относительно корпуса 1 (фиг. 6) с помощью I tJlDnU . I -CJ i у 111. - f - A.. - -Чj гулировочных винтов 6, выполняют бесступенчатую тонкую регулировку и получают необходимый натяг в собранном шариковом винтовом механизме. Устранение осевого зазора и создание натяга в системе корпус 8 винт 2 - шарики 3 - подвижные полугайки 4 и 5 повышает жесткость и нагрузочную способность передачи и обеспечивает высокую точность позиционирования. Винт 9 завинчивают до упора в пайку10 и тем самым фиксируют подвижные полугайки 4 и 5. На этом настройка шарикового винтового механизма завершается Формула изобретения Шариковый винтовой механизм, содержаший корпус, установленные в нем винт, взаимодействующие с ним две подвижные в осевом направлении полугайки с зубчатыми венцами и торцовыми ступенчатыми поверхностями и устройство для выборки зазора. -огличаюш ийся тем, что, с целью повышения .т..1-1 - от1Т1Т1/-МЛ1ГЧГ О OLJWCIГТОПКППРНИЯ точности позиционирования, повышения жесткости и нагрузочной способности, корпус имеет торцовую ступенчатую расточку, соответствующую торцовым ступенчатым поверхностям полугаек, на обращенных друг к другу торцовых поверхностях полугаек и на соответствующей торцовой поверхности расточки корпуса выполнены каналы перехода шариков, механизм снабжен клинообразными элементами, вершины которых закреплены в винтовой канавке винта, а основания - на торцовых поверхностях меньшего диаметра ступени каждой полугайки и на торцовой поверхности расточки корпуса, обращенной к соответствующему торцу полугайки, и двумя дугообраз i. отражателями, охватывающими осно вание соответствующих клинообразных элементов.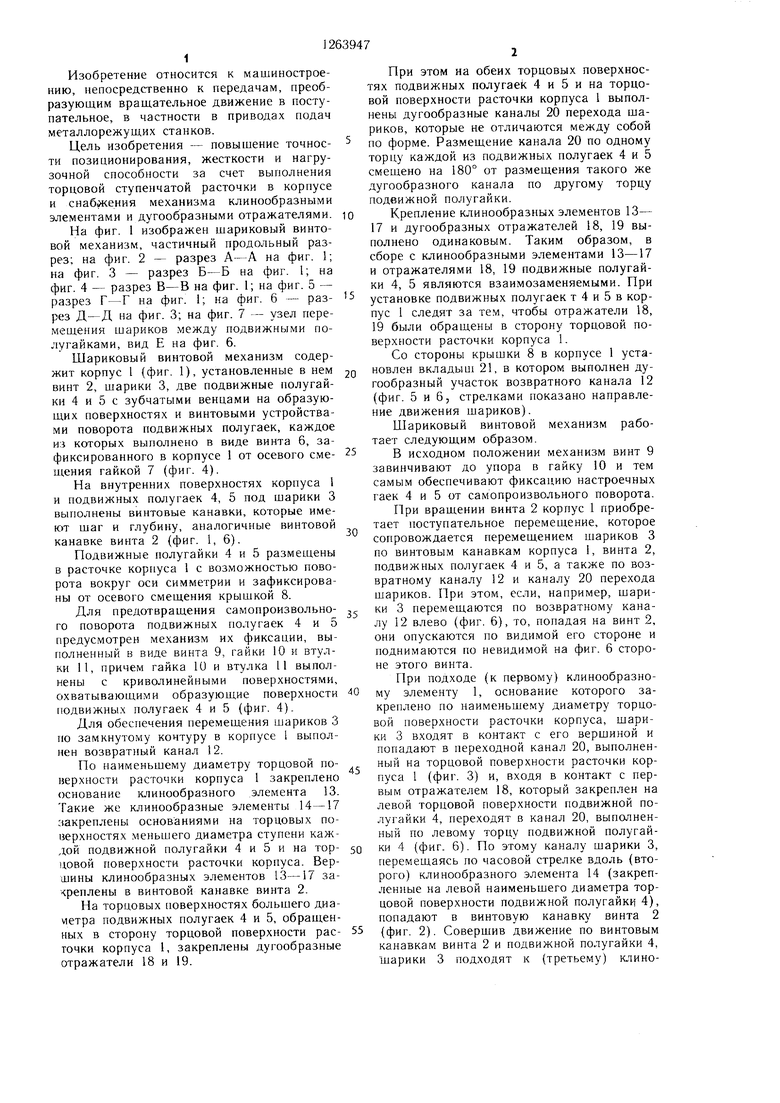
| название | год | авторы | номер документа |
|---|---|---|---|
| Беззазорная шариковая винтовая передача | 1986 |
|
SU1364800A1 |
| Передача винт - гайка качения | 1988 |
|
SU1665126A1 |
| Шариковый винтовой механизм | 1991 |
|
SU1820103A1 |
| Шариковый винтовой механизм | 1986 |
|
SU1425390A1 |
| Шариковый винтовой механизм | 1984 |
|
SU1200043A1 |
| ГАЙКА ШАРИКОВОЙ ВИНТОВОЙ ПЕРЕДАЧИ | 2007 |
|
RU2362926C2 |
| Шариковая винтовая передача | 1991 |
|
SU1810682A1 |
| Шариковый винтовой механизм | 1987 |
|
SU1441121A1 |
| ВИНТОВОЙ МЕХАНИЗМ | 1993 |
|
RU2090792C1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ЭЛАСТИЧНЫЙ ВИНТОВОЙ МЕХАНИЗМ | 1995 |
|
RU2140591C1 |
Изобретение относится к машиностроению, непосредственно к передачам, преобразующим вращательное движение в поступательное, в частности в приводах металлорежущих станков. Целью изобретения является повышение точности позиционирования и повышение жесткости и нагрузочной способности за счет снабжения механизма клинообразными элементами и дугообразными отражателями. Корпус имеет торцовую ступенчатую расточку. Клинообразные элементы своими вершинами закреплены в винтовой канавке винта а основаниями - на ступенчатых торцах подвижных полугаек, дугообразные отражатели охватывают основания клинообразных элементов. 7 ил. (Л с:
-Ч-
«т 3 ю Nл. . ./.
rj «put/ А -А
18
12
20
фиг.З
12
73
(. 5
| Шариковый винтовой механизм | 1979 |
|
SU1048205A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Шариковый винтовой механизм | 1982 |
|
SU1079926A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
