Изобретение относится к быстродействующим эластичным автоматическим винтовым механизмам (далее "механизм") и представляет собой новый тип таких механизмов, которые могут быть использованы в автомобильных домкратах, верстачных тисках, строительных подмостьях, станочных столах и подобных устройствах, где винтовой механизм используется в качестве движущего и где желательно уменьшить время холостого хода. Кроме того, механизм может быть использован в устройствах для установки объектов в определенных положениях и выверенных координатах. Основные принципы, использованные в данном изобретении, - это механическая автоматика, в том числе в процессах включения и выключения винтовой пары, применение упругих элементов, что позволяет данному механизму с автоматически перемещаемыми полугайками осуществлять автоматически следующие пять операций:
1. Плавная предварительная установка гребней и канавок сопрягаемых резьб.
2. Плавное сопряжение резьб пары на полную глубину резьб.
3. Жестокое самоблокирование полугаек в состоянии сцепления.
4. Снятие самоблокирования перед расцеплением.
5. Жесткое расцепление полугаек и винта.
Известны изобретения заявителя, относящиеся к винтовым механизмам с быстрым включением и отключением (см. например, патенты США N 4834355, 4923185, 5282392 и такие патенты Китая, как CN 2078210 U, CN 1047466 А, CN 2065969 U, CN 2057131 U, CN 1065514 A). В этих патентах соединение гребней и канавок резьбы при сцеплении гайки и винта достигается с помощью таких жестко действующих механизмов, как кулачковые. При этом существует проблема полного совмещения гребней и канавок резьбы, так как без такого совмещения винтовая пара не может работать нормально. Неполное совмещение приводит, во-первых, к тому, что количество сцепленных, т.е. работающих витков резьбы, невелико. Во-вторых, лишь незначительное количество витков оказывается сцепленным на всю высоту резьбы. Причем указанные недостатки усугубляются с увеличением ширины гребней резьбы. При "жестком" сцеплении полное зацепление на всю высоту резьбы может быть достигнуто только тогда, когда центры резьб на валу и винтовой канавке совпадают, а это, что вполне понятно, достигается очень редко. При этом надежность винтовой пары и ее несущая способность резко уменьшаются.
Известен также патент Китая CN 2139872 U, в котором, хотя и применяется пружина для перемещения полугаек при сцеплении, но перемещение полугаек при расцеплении производится с помощью передвигаемого вручную рычага. В этом патенте описан достаточно примитивный механизм с ручными сведением-разведением полугаек, без каких-либо механических автоматических устройств. Поэтому указанный выше патент не относится к той же области, что данное изобретение, а описанный в нем механизм не может осуществить перечисленные выше пять функций предложенного механизма. Последний осуществляет перечисленные функции и лишен указанных выше недостатков известных механизмов.
Известен быстродействующий эластичный винтовой механизм, содержащий кронштейн, винт, по крайней мере, две равномерно расположенные по окружности полугайки с внутренней резьбой, имеющее упругий элемент устройство для сведения-разведения полугаек путем их радиального перемещения в направляющих и самоблокирующее устройство для фиксации полугаек в сведенном состоянии - SU 1774103 A1, 07.11.92.
Известное изобретение недостаточно надежно в работе.
Техническим результатом заявленного изобретения является повышение надежности.
Для этого в быстродействующем эластичном винтовом механизме, содержащем кронштейн, винт, по крайней мере две равномерно расположенные по окружности полугайки с внутренней резьбой, имеющее упругий элемент устройство для сведения-разведения полугаек путем их радиального перемещения в направляющих и самоблокирующее устройство для фиксации полугаек в сведенном состоянии, винт установлен в опорном отверстии кронштейна, устройство для сведения-разведения полугаек содержит втулку и устройство, имеющее кулачковые элементы или пластины для разведения полугаек, а механизм снабжен устройством для разделения при перегрузке винта и втулки, устройством для изменения скорости, обеспечивающим механизму большую скорость при обратном ходе и устройством для ограничения осевого перемещения втулки.
В вариантах выполнения механизма могут быть использованы следующие конструктивные признаки.
Винт может быть установлен во внутреннем отверстии втулки, полугайки установлены с возможностью перемещения их передних и задних наружных поверхностей относительно внутренних направляющих кронштейна, а их боковых поверхностей относительно направляющей кронштейна и концевой направляющей поверхности втулки соответственно, для разведения полугаек на торцах последних могут быть кулачковые канавки, являющиеся кулачковыми элементами, взаимодействующие соответственно с кулачковыми штырями, расположенными на концевой поверхности втулки, образующими с ними кулачковые пары, упругий элемент может быть выполнен в виде съемной пластинчатой пружины, действующей на криволинейные поверхности донышек канавок, выполненных на полугайках, и обеспечивающей их плавное перемещение в направлении к центру, самоблокирующее устройство может быть выполнено в виде внутренних кулачков на втулке.
Устройство для сведения-разведения полугаек может также в варианте выполнения содержать кулачковые штыри (19,20), закрепленные на торцах полугаек соответственно, полугайки установлены с возможностью радиального перемещения в направляющих, образованных четырьмя поверхностями кронштейна, упругий элемент в этом варианте выполнен в виде хомута, самоблокирующее устройство содержит криволинейные поверхности, выполненные на втулке для взаимодействия со штырями, для разведения полугаек на втулке выполнен кулачковый профиль, имеющий минимальный радиус R1 на одном участке и максимальный радиус R2 на другом участке для взаимодействия со штырями, образуя с ними кулачковые пары, являющиеся кулачковыми элементами для разведения полугаек, на штырях выполнены головки, взаимодействующие с соответствующей торцевой поверхностью втулки для ограничения ее осевого перемещения.
В другом варианте устройство для сведения-разведения полугаек содержит кулачковые штыри, закрепленные на торцах полугаек, причем высота выступающей части штырей меньше, чем толщина втулки, полугайки установлены с возможностью радиального перемещения в направляющих кронштейна, упругий элемент выполнен в виде двух пружин сжатия, действующих на периферийные части полугаек соответственно, устройство для ограничения осевого перемещения втулки выполнено в виде пыленепроницаемого корпуса, соединенного с кронштейном винтом или сваркой, самоблокирующее устройство содержит внутренние криволинейные поверхности на втулке, опирающиеся на кулачковые штыри в сведенном положении гаек.
В одном из вариантов упругий элемент выполнен в виде пластинчатой пружины, для разведения полугаек устройство для сведения-разведения последних содержит пластины и штыри, взаимодействующие с соответствующей пластиной, при этом один штырь закреплен на втулке, а другой штырь на соответствующей полугайке, пластина выполнена с отверстием под первый штырь в форме продольного паза с возможностью перемещения этого штыря вдоль паза при вращении втулки вместе со штырем против часовой стрелки для перемещения полугайки от центра.
В варианте выполнения устройство для изменения скорости установлено на кронштейне и содержит штырек, пружину, втулку для штырька, эксцентриковую ручку для осевого перемещения штырька, а во втулке выполнено отверстие фиксатора, соосное штырьку.
В варианте выполнения устройство для изменения скорости имеет стержень-защелку, выполненную на винте, и расположенную против стержня-защелки шпоночную канавку, соединенную со стержнем-защелкой шарнирно эксцентриковую ручку, ограничитель с прорезью для размещения в ней эксцентриковой ручки и обеспечения малой скорости при зацеплении полугаек с винтом при обратном ходе, а также для обеспечения большой скорости при выведении эксцентриковой ручки из этой прорези, размещении ее в вертикальном положении и введении стержня защелки в шпоночную канавку винта при расхождении полугаек в процессе поворота последнего для его освобождения.
Благодаря использованию механического автоматического устройства для сведения-разведения полугаек данное изобретение обеспечивает надежность, простоту и практичность механизма, дает возможность осуществить пять упомянутых выше функций в течение одного рабочего цикла после поворота винта на один оборот в прямом или обратном направлениях. Использование в данной конструкции упругого элемента позволяет плавно вводить в зацепление внутренние резьбы полугаек и внешнюю резьбу винта. В то же время самоблокирующее устройство обеспечивает жесткое закрепление полугаек после их сцепления с винтом. При осуществлении процесса расцепления полугаек и винта используется жесткий механизм. Таким образом, в данном устройстве одновременно используются эластичные и жесткие механизмы, что обеспечивает полное использование как всех витков резьб, так и полностью высоты их нарезки при зацеплении полугаек и винта, а самоблокирование позволяет полностью обеспечить надежность винтовой пары при экстремальных нагрузках.
На фиг. 1 показана схема автомобильного домкрата с данным механизмом, обеспечивающим подъем и опускание с двумя скоростями (большой и малой).
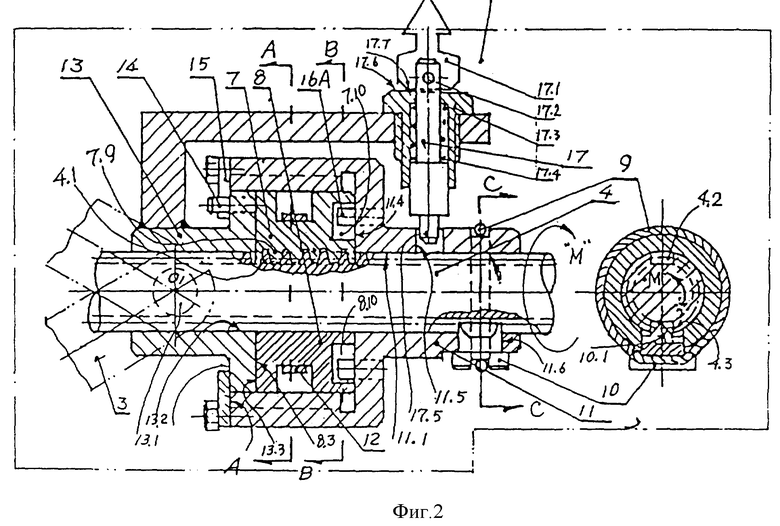
На фиг. 2 показан главный вид первого варианта данного механизма, который имеет две полугайки, причем упругий элемент выполнен в виде съемной пластинчатой пружины, самоблокирующий элемент в виде кулачка с внутренней криволинейной поверхностью, устройство для разведения полугаек - в виде кулачковых пар на торцах полугаек. Винт 4 вращается по часовой стрелке в направлении М, внешняя и внутренняя резьбы находятся в зацеплении.
На фиг. 3 показан подобный фиг. 2 вид, но винт 4 вращается против стрелки часов в направлении N, а внешняя и внутренние резьбы расцеплены.
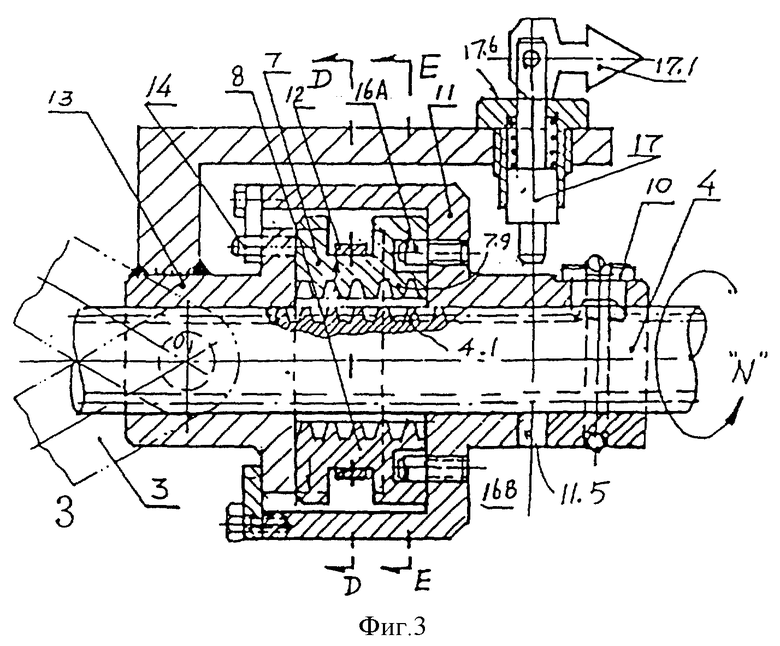
Фиг. 4-I представляет сечение по A-A фиг. 2, где винт 4 вращается в направлении М, а две полугайки совершают центростремительное движение под действием пластинчатой пружины, внешняя и внутренняя резьбы сцеплены.
Фиг. 4-II представляет сечение по B-B фиг.2, где полугайки сцеплены с винтом и самозаблокированы с помощью кулачков, имеющих внутренний профиль.
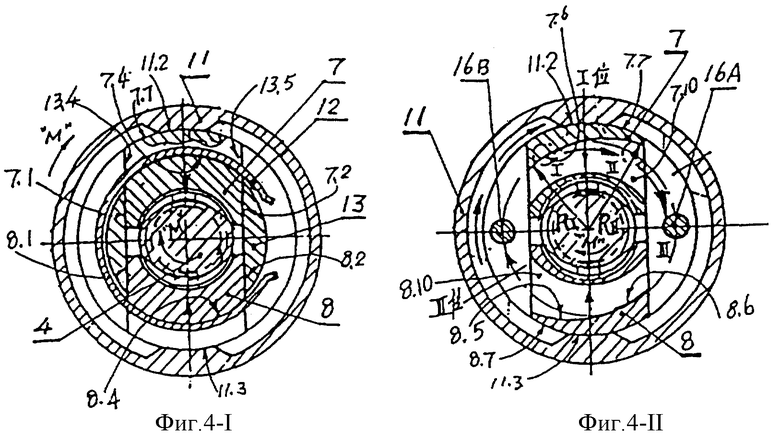
Фиг. 5-I это сечение по E-E фиг. 3. Винт 4 здесь вращается в направлении N, резьбы расцеплены.
Фиг. 5-II это сечение по Е-Е фиг. 3. Здесь полугайки освобождены от самоблокирования и расходятся от центра под действием кулачковых торцевых пар.
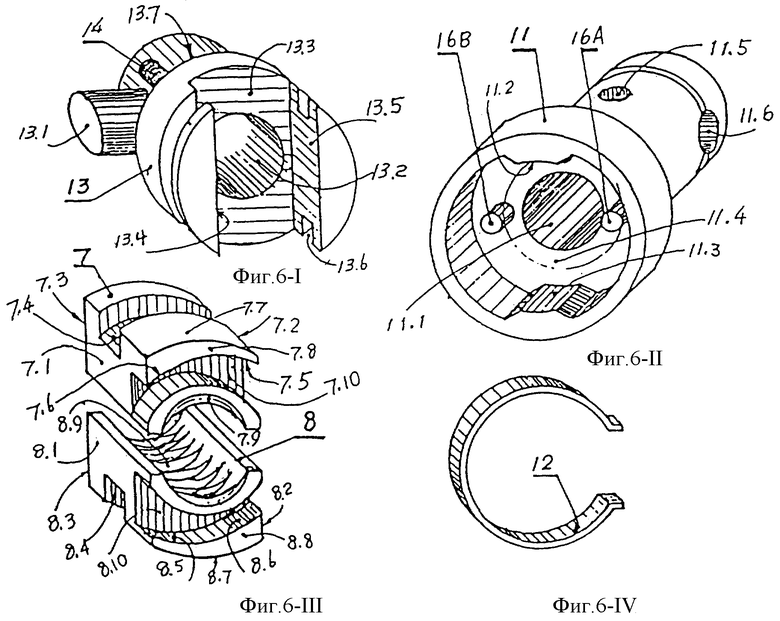
Фиг. 6-I - аксонометрический вид кронштейна по фиг. 2.
Фиг. 6-II - аксонометрический вид втулки по фиг. 2.
Фиг. 6-III - аксонометрический вид верхней и нижней полугаек по фиг. 2.
Фиг. 6-IV - аксонометрический вид съемной пластинчатой пружины по фиг. 2.
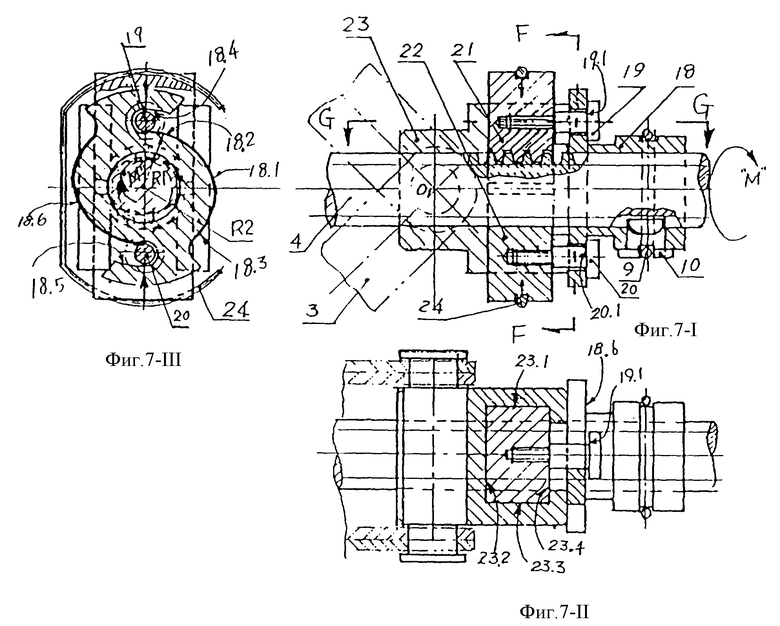
Фиг. 7-I - главный вид второго варианта данного механизма, где упругий элемент - это хомут из стальной проволоки, самоблокирующий элемент и элемент для разведения полугаек - дисковый кулачек, установленный на втулке. Винт 4 вращается в направлении М, резьбы сцеплены.
Фиг. 7-II - сечение по F-F фиг.7-I.
Фиг. 7-III - сечение по G-G фиг. 7-I.
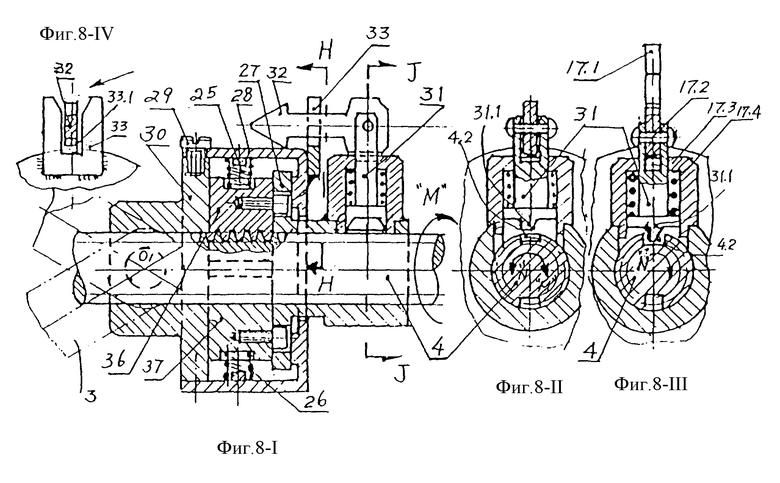
Фиг. 8-I- главный вид третьего варианта данного механизма, где упругий элемент - пружина сжатия, самоблокирующий элемент и элемент для разводки полугаек такие же, как на фиг. 7-I, но устройство для изменения скорости выполнено заодно с защелкой, винт находится в положении малой скорости, т.е. он может вращаться в направлениях М и N, резьбы сцеплены и гайки - в самозаблокированном состоянии.
Фиг. 8-II - сечение по J-J фиг. 8-I, показывающее защелку, извлеченную из винта.
Фиг. 8-III - другое сечение по J-J фиг. 8-I, показывающее защелку в шпоночной канавке винта 4.
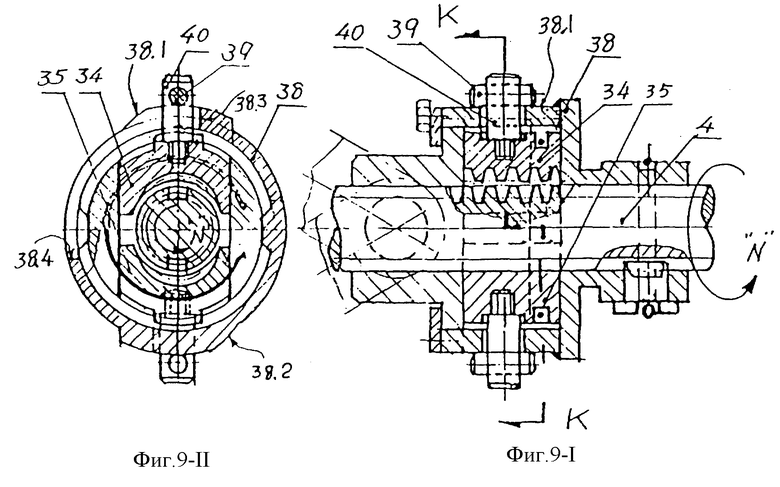
Фиг. 9-I - главный вид четвертого варианта данного механизма, где упругий элемент - это пружина сжатия, самоблокирующий элемент - внутренние кулачки, устройство для разведения гаек - внешняя кулачковая пара. На этой фигуре винт 4 вращается в направлении N, резьбы расцеплены.
Фиг. 9-II - сечение по K-K фиг. 9-I.
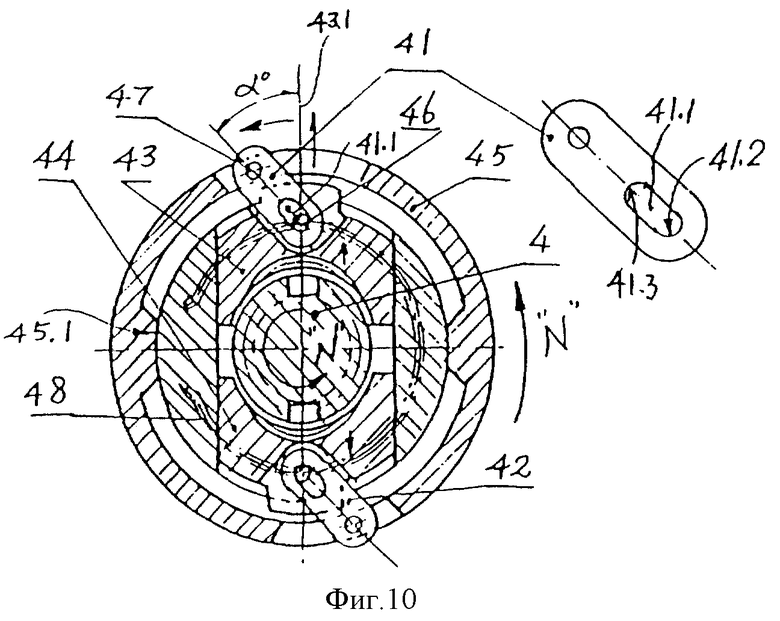
Фиг. 10 - главный вид пятого варианта механизма, аналогичного показанному на фиг. 9-II, за исключением устройства для разведения полугаек, которое выполнено со связующими пластинами. На фигуре винт 4 вращается в направлении N, а внутренняя и внешняя резьбы находятся в расцепленном состоянии.
Предпочтительные варианты изобретения.
На фиг. 2 представлен первый вариант данного изобретения (вариант "A"). В этом случае данный механизм используется в винтовом домкрате, применяющемся для смены колес (см. фиг. 1). Механизм смонтирован на шарнирной оси О1 с правой стороны винтового домкрата.
Винтовой домкрат содержит нижнюю опору 6, верхнюю опору 2, четыре рычага с секторными зубчатыми колесами, левую шарнирную ось О2, правую шарнирную ось О1, подшипники скольжения, винт 4 с рукояткой 1 и механизм, являющийся предметом данного изобретения, выполненный заодно с правой шарнирной осью О1. Левый конец винта 4 соединен с шарнирной осью О2 и его правая винтовая часть сопряжена с механизмом. Во время работы винт 4 вращают. При этом благодаря механизму расстояние между левой и правой шарнирными осями О1 и О2 уменьшается или увеличивается и верхняя опора поднимает или опускает автомобиль с помощью рычажного механизма.
На фиг. 2 дан главный вид механизма, являющегося предметом данного изобретения. Здесь винт 4 вращают в направлении стрелки М, при этом внешняя и внутренняя резьбы винтовой пары находятся в состоянии нормального зацепления. Данный вариант имеет две полугайки и его основные особенности следующие: эластичным рабочим элементом, перемещающим полугайки, является пластинчатая пружина сжатия 12.2, жесткий самозапирающий элемент выполнен в виде внутренней кулачковой пары, размыкающее устройство выполнено в виде торцевой кулачковой пары на концах полугаек.
Конкретно конструкция данного варианта включает опорный кронштейн 13, верхнюю 7 и нижнюю 8 полугайки, пластинчатую пружину сжатия 12, втулку 11, кулачковый штырь 16, защелку 10, пружинный хомут 9, ограничительный штырь 14, замковую пластину 15, регулятор скорости 17 и винт 4. Так как механизм использован здесь в винтовом домкрате, то опорный кронштейн соединен с шарнирной осью 13.1 (см. фиг.6-I). Винт 4 проходит через опорное отверстие 13.2 и отверстие 11.1 втулки. При этом он взаимодействует с автоматически перемещаемыми полугайками. Передние и задние наружные боковые поверхности (соответственно 7.1, 7.2 и 8.1, 8.2 полугаек 7 и 8) установлены с возможностью скольжения относительно внутренних боковых направляющих поверхностей 13.4 и 13.5 опорного кронштейна; левая и правая боковые поверхности 7.3, 8.3 и 7.8, 8.8 соответственно расположены с возможностью скольжения относительно правой направляющей поверхности 13.3 опорного кронштейна и левой концевой направляющей поверхности 11.4 втулки соответственно. Устройство для сведения и разведения полугаек в данном варианте включает торцевые кулачковые канавки 7.10 и 8.10 на правых торцах полугаек 7, 8, которые взаимодействуют соответственно с кулачковыми штырями 16A и 16B на левой концевой поверхности втулки 11; при этом указанные штыри и канавки образуют кулачковые пары упомянутого устройства. Конструктивные особенности этих пар заключаются в следующем (см. в качестве примера полугайку 7, фиг.4-II и фиг. 5-II). Пусть максимальный радиус внутренней криволинейной поверхности кулачка будет R2 в крайнем правом положении ( позиция II), а минимальный радиус R1 в крайнем левом положении (позиция I). Очевидно, что разность этих радиусов есть расстояние, на которое полугайка 7 сдвигается от центра при размыкании, как показано на фиг. 5-II. Когда кулачковый штырь 16A вращается вместе с винтом 4 и втулкой 11 в направлении N из позиции III через позицию II в позицию I, внутренние резьбы 7, 9 и 8, 9 полугаек 7 и 8 одновременно выходят из зацепления с наружной резьбой 4.1 винта 4. Когда втулка 11 вращается в направлении N, ее внутренние кулачки 11.2, 11.3 также поворачиваются в том же направлении (см. фиг. 5-II). При радиальном перемещении полугаек 7, 8 пластинчатая пружина 12 оказывает центростремительное силовое воздействие на полугайки через донные криволинейные поверхности 7.4 и 8.4 канавок на боковой поверхности полугаек.
Когда втулка 11 вращается в направлении стрелки М, кулачковый штырь 16A перемещается из позиции I через позицию II в позицию III (см. фиг. 4.I, 4. II). При этом полугайка 7 и полугайка 8 плавно под действием пружины 12 перемещаются к центру, входя в конечной стадии в рабочее зацепление с резьбой винта 4. В этом положении верхняя криволинейная поверхность 7.7 кулачка верхней полугайки 7 находится в крайнем нижнем положении, а внутренний кулачек 11.2 втулки 11 повернут в позицию I и контактирует с поверхностью 7.7. Благодаря этому обеспечивается надежный даже при высоких эксплуатационных силовых нагрузках контакт полугайки 7 с винтом 4, т.е. обеспечивается "самоблокирующий" эффект. Аналогичное происходит с полугайкой 8.
Источником крутящего момента, поворачивающего втулку 11 в направлениях М или N, является винт 4. Момент передается на втулку через антиперегрузочное устройство, смонтированное на втулке 11. Это устройство содержит защелку 10, установленную в радиальном отверстии 11.6 втулки 11 с возможностью скольжения, пружинный хомут 9 и шпоночные канавки 4.2, выполненные на винте 4. На конце защелки 10 выполнены два скоса 10.1. Концевая часть защелки 10 прижимается действием пружинного хомута 9 либо к поверхности резьбы винта 4, либо она может быть введена в шпоночную канавку 4.2. Когда винт 4 вращают в направлении М, боковые кромки 4.3 шпоночной канавки 4.2 упираются в скосы 10.1 и втулка 11 вращается синхронно с винтом 4 в направлении М. При этом механизм описанным выше образом смещает полугайки 7, 8 к центру до рабочего контакта с резьбой винта 4. Поворот прекращается, когда ограничительный штырь 14 опорного кронштейна 13 упрется в замковую пластину 15 на втулке 11. Между тем винт 4 продолжает вращаться в направлении М. При этом сила, с которой кромки 4.3 канавки действуют на скос 10.1, увеличивается, и в результате защелка 10 выталкивается в радиальном направлении, преодолевая сопротивление хомута 9, из канавки 4.2. Далее винт 4 продолжает вращаться в направлении М, осуществляя подъем автомобиля, а втулка 11 остается неподвижной. С другой стороны, когда винт вращают в направлении N, крутящий момент будет передаваться тем же самым путем на втулку 11 через защелку 10, заставляя втулку 11 вращаться вместе с винтом 4. При этом описанным выше образом механизм осуществляет перемещение полугаек 7, 8 в радиальном направлении от центра, внешняя и внутренняя резьбы расцепляются и осуществляется быстрое опускание верхней опоры 2. Если необходимо замедлить опускание опоры 2, можно использовать фиксирующее устройство, которое монтируется на опорном кронштейне 13. Это устройство содержит штырек 17.5, пружинку 17.4, втулку 17.6, ось 17.2 и эксцентриковую рукоятку 17.1. При этом штырек 17.5 соосен отверстию фиксатора 11.5, выполненному во втулке 11.
Принцип действия устройства следующий. Когда желательно, чтобы обратное движение домкрата было медленным, устанавливают эксцентриковую ручку 17.1 в такое положение, чтобы стрелка показывала вверх (см. фиг. 2). При этом пружина 17.4 выдвигает штырек 17.5 в крайнее нижнее положение так, что его конец находится в отверстии 11.5. Поэтому втулка 11 зафиксирована от вращения и полугайки 7 и 8 остаются в зацеплении с винтом 4 и при обратном движении механизм работает как обычная винтовая пара, не допуская ускоренного опускания верхней опоры 2. Если желательно осуществить ускоренное обратное движение домкрата, эксцентриковую рукоятку 17.1 устанавливают так, чтобы стрелка была расположена горизонтально. При этом поверхности эксцентриковой пары (нижняя поверхность 17.7 рукоятки и верхняя поверхность 17.6 втулки) располагаются таким образом (фиг. 3), что конец штырька 17.5 выходит из отверстия 11.5 втулки 11, последняя может быть приведена во вращение винтом 4 в направлении N, полугайки 7, 8 расцепляются с винтом 4 и происходит ускоренное обратное (холостое) движение, т.е., если механизм применен в винтовом домкрате, данное изобретение позволяет осуществлять ускоренный подъем и опускание объекта.
На фиг. 7-I показан главный вид второго варианта механизма. В этом варианте применен механизм, во всем аналогичный показанному на фиг. 2 за исключением кулачковых элементов, обеспечивающих самоблокирующий эффект, сведение и разведение полугаек. Конкретно конструкция выполнена следующим образом. Кулачковые штыри 19, 20 укреплены на правых торцевых поверхностях полугаек 21 и 22 соответственно. Полугайки для обеспечения сцепления-расцепления с винтом 4 установлены с возможностью совершения радиальных перемещений в направляющих, образованных в опорном кронштейне 23 (на фиг. 7-II такими направляющими служат 4 плоскости 23.1-23.4; эти поверхности могут иметь форму "ласточкина хвоста", цилиндра и т.п.). Упругим элементом, стягивающим полугайки, служит пружинный хомут 24. Элементами, обеспечивающими самоблокирование, здесь служат внутренние кулачковые поверхности 18.4 и 18.5 на втулке 18, которые подобно крючкам охватывают кулачковые штыри 19, 20 (см. фиг.7-III). Сцепление-расцепление полугаек с витом 4 обеспечивается с помощью кулачковых поверхностей 18.1, 18.2. При этом поверхность 18.1 имеет минимальный радиус R1 на части 18.2 и максимальный радиус R2 на части 18.3. Указанные поверхности взаимодействуют со штырями 19, 20, образуя с ними кулачковые пары. Чтобы ограничить осевое перемещение втулки 18, на штырях 19 и 20 предусмотрены головки 19.1 и 20.1, которые упираются в правую торцевую поверхность 18.6 втулки 18. Такого рода ограничитель может быть выполнен в виде большой шайбы с выступающим цилиндрическим краем или в виде корпуса, взаимодействующего с правым торцoм 18.6 втулки 18, закрепленного на опорном кронштейне 23 (например, сваркой или винтами), как показано на фиг.8.I. Поскольку работа этого механизма при сцеплении-расцеплении и самоблокировании такая же, как у предыдущего варианта, она здесь не описывается.
На фиг. 8-I представлен главный вид третьего варианта механизма, являющегося предметом данного изобретения. В данном варианте сделано несколько эквивалентных изменений относительно предыдущего второго варианта, а именно упругий элемент выполнен в виде двух пружин сжатия 25, 26, устройство для ограничения осевого перемещения втулки выполнено в виде закрытого пыленепроницаемого корпуса 28, который соединен винтом 29 с опорным кронштейном 30. Кроме того, штырек 17.5 и защелка 10 (см. фиг.2) заменены стержнем-защелкой 31. Все остальные элементы в данном варианте такие же, как в предыдущем, и поэтому здесь не описываются. Однако одну особенность необходимо отметить. Данный вариант не только технологичнее, но и отличается большей надежностью по сравнению с предыдущим, причем стержень-защелка 31 облегчает операцию изменения скорости. Эта операция в данной конструкции осуществляется следующим образом. Пусть винт 4 вращается в направлении M, а две полугайки 36 и 37 находятся с винтом 4. При этом эксцентриковая рукоятка 32 повернута в горизонтальное положение и введена в прорезь 33.1 ограничителя 33 (см. фиг. 8.II и 8. IV), а рабочий наконечник 31.1 стержня 31 выведен из шпоночной канавки 14.2 винта 4. Одновременно втулка 27 зафиксирована с помощью рукоятки 32 от поворота, т.е. обе полугайки сцеплены с винтом 4 и данный механизм как обычный винтовой механизм работает только на малой скорости. Для того чтобы (холостое движение) происходило при высокой скорости, достаточно повернуть рукоятку 32 в вертикальное положение, выведя ее из прорези ограничителя, как показано на фиг. 8.III. При этом наконечник 31.1 вводится в шпоночную канавку 4.2 винта 4, т.е. условия работы здесь такие же, как на фиг. 3, и при вращении винта 4 в направлении N обе полугайки 36 и 37 расходятся, расцепляясь с винтом 4.
На фиг. 9-I показан четвертый вариант данного изобретения, который выполнен на основе конструкции по фиг. 2. Кулачки 7.6, 8.6 (см. фиг. 4-II), которые осуществляют функцию сведения-разведения полугаек, в данном варианте преобразованы в наружные цилиндрические поверхности втулки 38, которые на фиг. 9-I обозначены как 38.1 и 38.2. Эти поверхности взаимодействуют со штырями 39, укрепленными на полугайках 34, 35 с помощью соединительных стержней 40. При этом концевые части криволинейных канавок 38.3 и 38.4, выполненных на втулке 38, используются как ограничители поворота втулки. Когда указанные концевые части соприкасаются со стержнями 40, поворот втулки прекращается. Что касается остальных элементов механизма, то они аналогичны показанным на фиг. 2 и в описании не нуждаются.
На фиг. 10 показан четвертый вариант данного изобретения. Он отличается от показанного на фиг. 2 только заменой кулачков 8.5, 8.6 и 7.5, 7.6 на две связующие пластины 41 и 42 (см. фиг. 10), которые служат для сведения-разведения гаек; при этом устранены штыри 16А, 16В, укрепленные на опорном кронштейне 13 (см. фиг. 2). Что же касается упругого элемента и самоблокирующего элемента, то таковые в данном варианте в основном не отличаются от показанных на фиг. 2. Рассмотрим работу данного варианта механизма на примере верхней полугайки 43. В отверстиях пластины 41 свободно установлены два штыря 46, 47, причем штырь 47 укреплен на втулке 45, а штырь 46, расположенный в продольном отверстии 41.1, - на полугайке 43. Когда втулка 45 поворачивается вместе со штырем 47 в направлении N, нижний край 41.2 отверстия 41.1 соприкасается со штырем 46, что приводит в движение полугайки 43 вдоль оси 43.1 в сторону расцепления с винтом 4. Когда втулка вращается в направлении М, штырь 46 движется вдоль отверстия 41.1 пластины 41, а полугайка 43 под действием пружины 48 движется к центру для зацепления с винтом 4. В конечной стадии этого движения полугайка 43 фиксируется самоблокирующим кулачком 45.1. Может быть также реализован принцип самозамыкания в положении, когда пластина 47 расположена под углом α = 0 к оси 43.1. В этом случае можно обойтись и без самоблокирующего кулачка.
Резюмируя изложенное, отметим, что механизм, являющийся предметом данного изобретения, может быть использован в домкратах, верстачных тисках, машинных тисках, трубных тисках, подвижных столах станков, задних бабках токарных станков, строительных подмостьях с регулируемой высотой и во всех других устройствах, в которых применяются винтовые механизмы в качестве движущих. При этом во всех случаях с соответствующим изменением взаимосвязей деталей применяются механизмы, являющиеся разновидностями данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический станок для нарезки ниппелей | 1933 |
|
SU49735A1 |
| РАЗЪЕМНАЯ ГАЙКА ДЛЯ ХОДОВЫХ ВИНТОВ | 1994 |
|
RU2133394C1 |
| Шариковая винтовая передача | 1991 |
|
SU1810682A1 |
| Устройство для поштучной выдачи плоских заготовок | 1987 |
|
SU1426681A1 |
| Шариковый винтовой механизм | 1991 |
|
SU1820103A1 |
| ХОДОВАЯ ГАЙКА МЕХАНИЗМА ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2013 |
|
RU2542787C1 |
| Шариковый винтовой механизм | 1985 |
|
SU1263947A1 |
| Шариковая винтовая передача с регулируемым зазором | 1986 |
|
SU1397659A1 |
| Устройство для двусторонней обработки оптических деталей с криволинейными поверхностями | 1981 |
|
SU1002134A1 |
| ТУАЛЕТ ДЛЯ ИСПОЛЬЗОВАНИЯ В УСЛОВИЯХ КОСМОСА | 2009 |
|
RU2478065C2 |
Изобретение относится к быстродействующим эластичным винтовым механизмам, применяющимся в различных домкратах, тисках, регулируемых столах станков и других подобных устройствах, в которых винтовой механизм является движущим и желателен ускоренный холостой ход. Механизм содержит кронштейн, винт, по крайней мере две полугайки и устройство для сцепления-расцепления полугаек с винтом, причем сцепление осуществляется упругим элементом, в положении зацепления полугайки закрепляются самоблокирующим кулачковым устройством, а расцепление осуществляется кулачковым или пластинчатым механизмом. Технический результат заключается в повышении надежности. 6 з.п.ф-лы, 10 ил.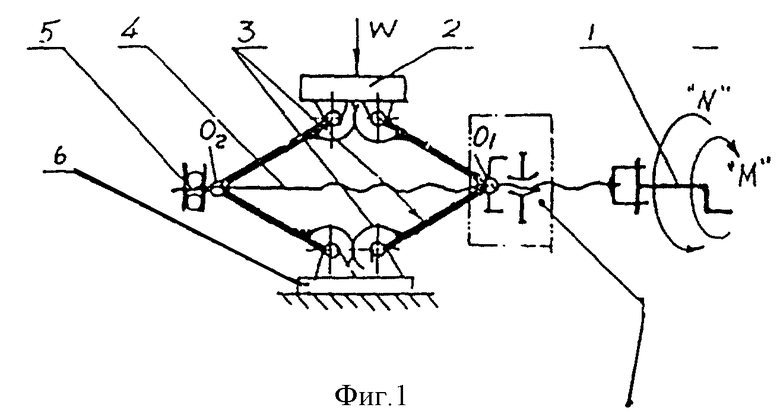
(11), образующими с ними кулачковые пары, упругий элемент выполнен в виде съемной пластинчатой пружины, действующей на криволинейные поверхности (7.4, 8.4) донышек канавок, выполненных на полугайках (7, 8), и обеспечивающей их плавное перемещение в направлении к центру, самоблокирующее устройство выполнено в виде внутренних кулачков (11.2, 11.3) на втулке (11).
| Механизм линейного перемещения | 1989 |
|
SU1774103A1 |
| SU 1486684 A, 15.06.89 | |||
| Устройство для регулирования переменного напряжения | 1983 |
|
SU1098092A1 |
| Прецизионные тиски | 1988 |
|
SU1551531A1 |
| 2,4-ДИМЕТИЛ-3-(5-НИТРОФУРФУРИЛ)-ПИРАЗОЛ, ОБЛАДАЮЩИЙ СПОСОБНОСТЬЮ АКТИВИРОВАТЬ ПРОРАСТАНИЕ СЕМЯН ПШЕНИЦЫ | 1998 |
|
RU2139872C1 |

