(54) ВИБРАЦИОННЫЙ КАТОК
в виде индукционного датчика, датчик фазы вращения дебаланса вибратора - в виде синусно-косинусного вращающегося трансформатора.
Экстремальный регулятор выполнен в виде последовательно соединенных - фазочувствительного демодулятора и интегратора.
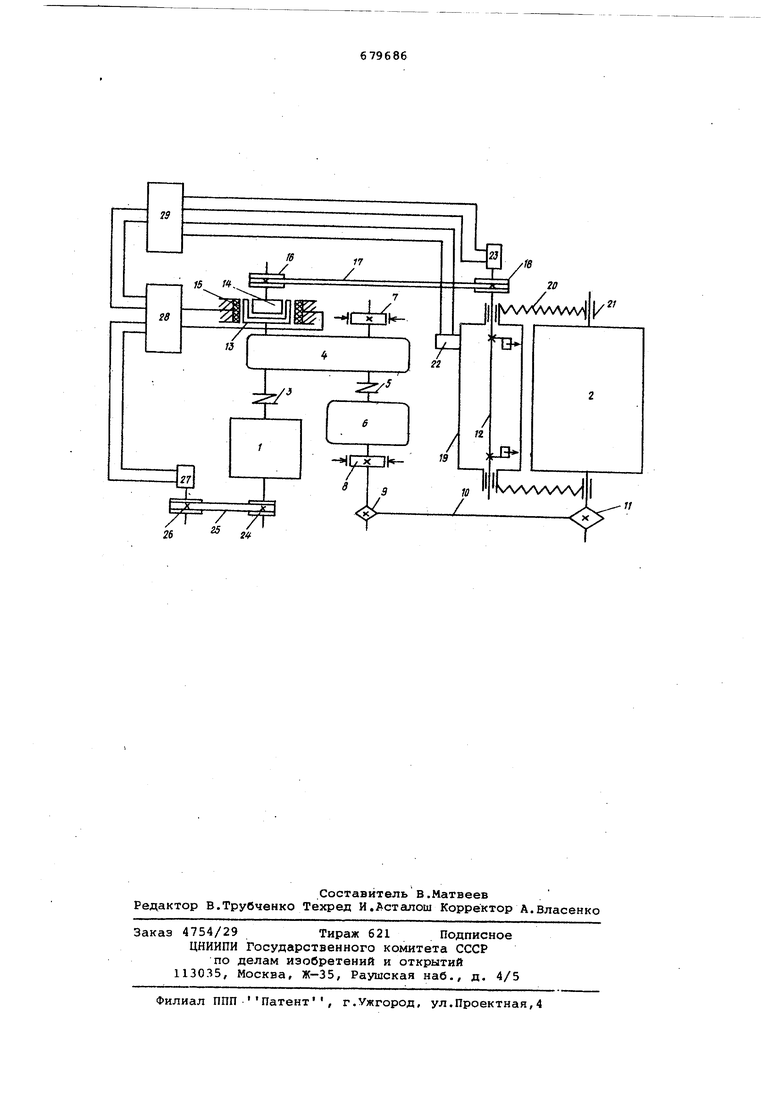
На чертеже изображена функциональная схема вибрационного катка.
Двигатель 1 связан с вальцем 2 трансмиссией, состоящей из эластично муфты 3, редуктора 4, эластичной муфты 5, реверсирующего механизма б, тормозных устройств 7 и 8, цепной передачи 9-11
Двигатель 1 связан с валом дебалансного вибратора 12 трансмиссией состоящей из эластичной муфты 3, индукционной муфты, содержащей ведущ то часть 13, ведомую часть 14, неподвижную обмотку 15 возбуяздения, ременной передачи 16-18.
Корпус 19 вибратора при помощи упругих элементов 20 установлен на вальце, который вращается в подшипниках 21.
На корпусе установлен ,датчик 22; фазы перемещения «Корпуса, а с вибратром связан датчик 23 фазы .вращения вала вибратора.
С приводным двигателем через ременную передачу 24-26 связан датчик 27 скорости.
Регулятор 28 возбуждения со стороны входа подключен к датчику скорости 27 и выходу экстремального ре гулятора 29, а со стороны выхода к обмотке возбуждения индукционной муфты.
Экстремальный регулятор со стороны входа подключен к датчикам фазы перемещения корпусаи фазы вращения вала вибратора.
Вибрационный каток работает следующим образом.
При вращении двигателя 1 через трансмиссию.движение передается вальцу 2 и каток перемещается в направлении, зависящем от положения реверсирующего механизма 6.
Одновременно через трансмиссию движение передается вибратору 12, который через корпус 19 и упругие элементы 20 передает вибрацию вальЦУ 2.
Скорость вращения ведущей части 13 индукционной муфты определяется скоростью вращения двигателя 1,скорость вращения ведомой части 14 индукционной муфты, а следовательно и вибратора зависит от скорости вращения ведущей части и величины тока в обмотке 15 возбуждения муфты. Величина тока в обмотке возбуждения определяется величиной сигнала, поступающего с выхода регулятора 28возбуждения, выполняемого в виде суммирующего усилителя, предварительная настройка которогоосуществляется таким образом,чтобы в рабочем диапазоне скоростей вращения двигателя 1 и при усредненных характеристиках системы каток уплотняемая среда скорость вращения ведомой части муфты, а следовательно и вала вибратора 12 находилась в эокаток - уплотне резонанса системы
няемая среда .
При включении экстремального регулятора , выполненного в виде последовательно соединенныхJ фазочуаствнтельного демодулятора и интегратора, система
каток-уплотняемая
среда перейдет в резонансный режим работы. Переход з резонансный
режим обусловлен особенностями резонансной системы - возникновением при резонансе разности фаз между перемещением корпуса 19 и вращением вибратора 12, равной И/2, и выполнением экстремального регулятора. Входящий в экстремальный регулятор фазочувствительный демодулятор формирует сигнал, пропорциональный косинусу указанной разности фаз,.информация о которой поступает с датчиков
22 и 23, выполненных, например, в виде индукционного датчика и в виде синусо-косинусного вращающегося трансформатора,
Если при включении катка система
находилась в дорезонансном режиме, то косинус разности фаз положителен и входящий в экстремальный регулятор29 интегратор через регулятор 28. {возбужденияизменяет ток в обмотке
15 индукционной муфты таким образом, чтобы система каток - уплотняемая среда перешла на резон-ансный режим работы.
Если при включении катка система находилась в резонансном режиме, то косинус сдвига фаз равен нулю и изменений тока в обмотке 15 возбуждения индукционной муфты не произойдет.
Если при включении катка система находилась в зарезонансном режи.ме, то косинус разности фаз отрицателен и входящий в экстремальный регулятор 29 .интегратор через регулятор 28 возбуждения изменяет ток
в обмотке 15 индукционной муфты таким образом, чтобы система каток уплотняемая среда перешла на резонансный режим работы.
При изменении свойств уплотняемой среды резонансная характеристика системы смещается и система переходит на дорезонансный режим. Однако при этом возникает разность фаз перемещения корпуса и вращения вала вибратора, не равная значению , и экстремальный регулятор аналогично изложенному возвращает систему к резонансному режиму.
При изменении, например, характеристик упругих элементов 20 работа
экстремального регулятора также про исходит аналогично вышеизложенному.
Переход двигателя 1 на новую скорость враццения изменяет скорость вращения ведомой части 14 индукционной муфты и вала вибратора 12, что при- водит к нарушению резонансного режима. Для компенсации этого с двигателем через передачу 24-26 связывают датчик 27 скорости тахогенераторного типа. Сигнал с датчика скорости через регулятор возбуждения изменяет ток в обмотке 15 в таком направлении и на такую величину, чтобы возникшее отклонение скорости стремилось к нулю.
Таким образом, стабилизация резонансного режима обеспечивается в вибрационном катке системой регулирования по отклонению с использованием датчиков 22, 23, регуляторов 28, 29 и индукционной муфты, и системой регулирования по возмущению с . использованием датчика 2,7, регулятора 28 и индукционной муфты.
Благодаря введению индукционной муфты с простым способом регулирования скорости вращения ведомой части отпадает необходимость в индивидуаль ном электроприводе вибратора для стабилизации резонансных режимов.
Благодаря установке датчиков и регуляторов представляется возможность стабилизировать резонансные режимы работы виброкатка и использовать преимущества резонансного режима: уменьшение энергоемкости катка,.повышение амплитуды.колебаний вальца и, соответственно, производительности процесса уплотнения.
Формула изобретения
1. Вибрационный каток, содержащий валец с установленным на нем посредством упругих элементов дебалансным
вибратором с корпусом, двигатель, связанный трансмиссиями с вальцем и валом дебалансного йибратора, о тличающийся тем, что, с целью повышения эффективности уплотнения за счет стабилизации резонансного режима, он снабжен индукционной муфтой с регулятором возбуждения, датчиком скорости вращения вала двигателя, установленным в трансмиссии к вибратору датчиком фазы вращения
дебаланса вибратора с экстремальным регулятором и датчиком фазы перемещения корпуса вибратора, причем выходы датчиков фазы подключены к входам экстремального регулятора, а
выходы датчика скорости и экстремального регулятора - к входам регулятора возбуждения.
2.Каток по П.1, отличающийся тем, что,- регулятор режима возбуждения выполнен в виде суммирующего усилителя.
3.Каток ПОП.1, отлича ющ И и с я тем, что датчик скорости выполнен в виде тахогенераторного датчика.
4. Каток поп.1, отличающийся тем, что датчик фазы перемещения корпуса вибратора выполнен в виде индукционного датчика.
5.Каток по П.1, отлича ющ и и с я тем, что датчик фазы
вращения дебаланса вибратора выполнен в виде синусно-косинусного вращающегося трансформатора.
6.Каток по П.1, отлича ющ и и с я тем, что экстремальный
регулятор выполнен в виде последовательно соединенных фазовращательного демодулятора и интегратора.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР , № 354052, кл. Е 01 С 19/28, 1969.
2.Патент СССР 425410, кл. Е 01 С 19/28, 1969.
ij jivvvwvvvvl
J да КлАЛАЛЛ/ I
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибрационный каток | 1977 |
|
SU723018A1 |
| Дорожный каток | 1983 |
|
SU1133325A1 |
| Вибрационный механизм вальца дорожного катка с регулировкой вынуждающей силы | 2023 |
|
RU2805708C1 |
| Двухканальная система регулирования скорости | 1980 |
|
SU900256A1 |
| Электрический ретардер | 2019 |
|
RU2729329C1 |
| Регулируемый электропривод постоянного тока с периодической нагрузкой | 1981 |
|
SU985915A1 |
| Самоходный дорожный каток | 1976 |
|
SU896150A1 |
| Трансмиссионная система | 1984 |
|
SU1288838A1 |
| Машина для устройства горизонтальной разметки | 1988 |
|
SU1599462A1 |
| Стенд для испытания трансмиссий транспортных средств | 1985 |
|
SU1322108A1 |