Изобретение относится к двухканальным мнсгосвязным системам автоматического регулирования и может быть применено в механизмах стабилизации И регулирования скорости, например для регулирования скорости вращения двухфазной синхронно-редукторной электрической машины.
Известна система регулировки скорости, содержащая двухфазный синхронный двигатель, двухфазный тахогенератор, датчик угла (сельсин), усилитель и фазочувствительные выпрямители (фазовые детекторы).
Обмотка возбуждения датчика угла подключена к задатчику скорости, а его фазные обмотки через фазочувствительные выпрямители с последовательно соединенными фазными обмоткаг-да тахогенератора подключены к входам усилителей, выходы которых соединены с фазными обмотками исполнительного двигателя 1.
Недостатками этой системы являются ее конструктивная сложность, так как она содержит три электрические машины (исполнительный двигатель, датчик угла и тахогенератор) и относительно низкое быстродействие в связи с тем, что входной сигнал системы поступает на обмотку возбуждения датчика, который яв-пяется инерционным звеном.
Известна также двухканальная многосвязчая система регулирования скорости, содержащая в каждом канале регулирования последовательно соединенные измеритель рассогласования и регулятор, выход которого соеди10нен с соответствующим входом измерителя рассогласования, причем выходы измерителя рассогласования и регулятора одного из каналов соединены с соответствующими входаьш регулятора
15 другого канала 2.
Недостатком такой системы является ее низкая точность.
Наиболее близким по технической сущности к предлагаемому изобретению
20 является двухканальная система регулирования скорости, например синхронно-редукторной электрической машины, содержащая два канала регулирования, каждый из которых состоит из 5 последовательно соединенных функционального преобразователя, сумматора и усилителя мощности, причем первый выход объекта регулирования соединен с сигнальным входом функционального
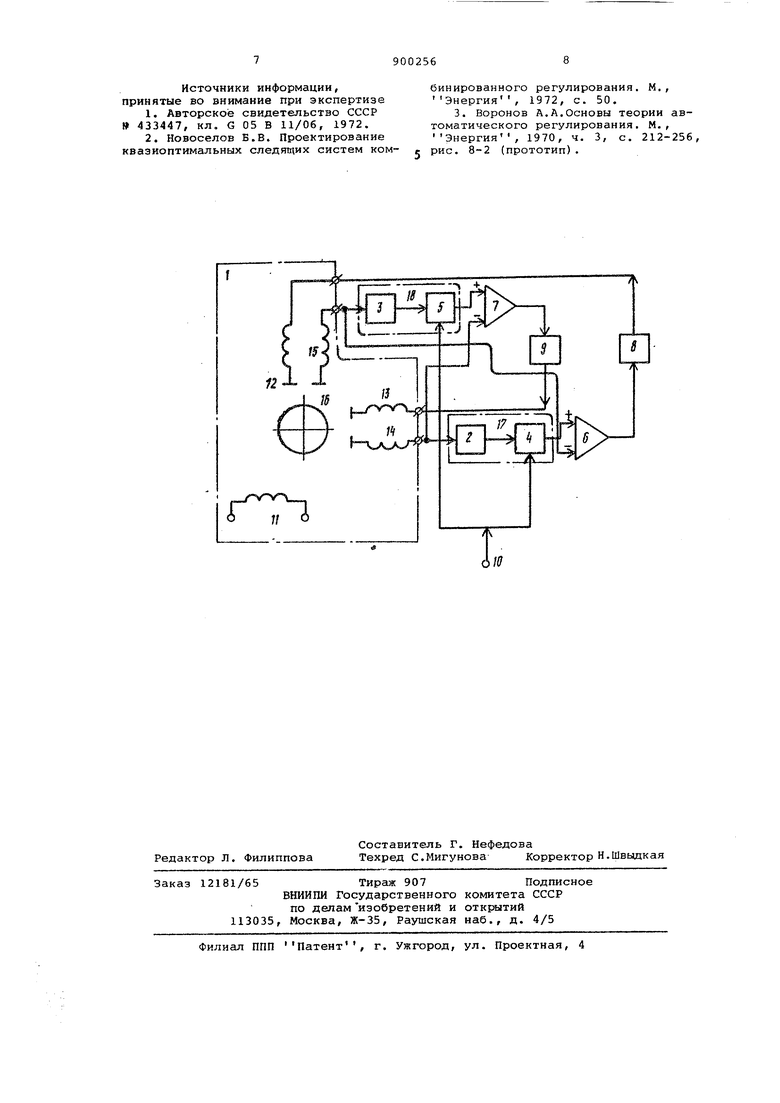
30 преобразователя первого канала регу. лирования и вторым входом сумматора второго канала регулирования, а вто рой вход объекта регулирования соед нен с сигнальным входом функциональ ного преобразователя второго канала регулирования и вторым входом сумма ора первого канала регулирования а входы объекта регулирования соеди|Нены с выходами усилителей мощности соответствующих каналов регулирования 3 . Недостаток известной системы состоит в ее низкой точности и быстродействии. Цель изобретения - повышение точности и быстродействия системы регулирования скорости. Поставленная цель достигается тем что я системе управляющие входы функ циональных .преобразователей соединены между собой и подключены ко входу системы, а каждый функтлиональный пре образователь содерисит последовательно соединенные интегратор и блок умножения, причем вход интегратора, второй вход и выход блока умножения подключены соответственно к сигнальному и управляющему входам и выходу функционального преобразователя. На чертеже представлена функциональная схема предалагаемого устройства. Система содержит объект 1 регулирования (например, синхронно-редукторная электрическая машина), интеграторы 2 и 3, блоки 4 и 5 умножения, сумматоры б и 7, усилители 8 и 9 мощности, вход 10 системы, обмот ку 11 возбуждения, фазные обмотки управления, т.е. двигательные обмотки 12 и 13, фазные вторичные таксгенераторные обмотки 14 и 15, ротор 16 синхронно-редукторной электрической машины, функциональные преобразователи 17 и 18. Блоки 2,4,6 и 8 образуют первый канал регулирования, а блоки 3,5,7 и 9 - второй кангш регулирования. Система работает следующим образо Работа первого канала oci дecтвляется так. На первой фазе вторичной обмотки 14 формируется напряжение (u;t- fJ-K aJcoMu;), угловая скорость вращения вала электрической машины 1, умноженная на количество зубцов ротора 16 (коэффициент редукции) начальная угловая фаза (электрическая) магнитной нейтрали вращающегося индуктора;амплитуда напряжения тахогенераторной обмотки, пропорциональная скорости вращения вала электрической машины К - коэффициент передачи .первой фазы тахогенераторной обмот1-и 14 . Напряжение Цц интегрируется интегратором 2, на выходе которого ормируется напряжение KiUTHno- -StnCu t Kj,-K,, %1и((. где К- коэффициент передачи интегратора 2; iii коэффициент передачи, т.е.крутизна фазы тахогенераторной обмотки 14 . Напряжение U поступает на первый вход блока 4 умножения, на второй вход которого поступает входлой сигнал системы Ugx . Выходное напряжение блока умножения выражается формулой Ui, K4-Kj.KT.- Ug siM(a;{+vf) где К4 - коэффициент передачи блока умножения, имеющий размерность 1 В. Выходное напряжение блока 4 умножения поступает на первый вход сумматора 6, реализованного, например, на операционном усилителе, на второй, (инвертирующий) вход которого поступает напряжение со второй фазы тахогенераторной обмотки 15 и/15 тжо,«- siH(.a t4-P)K,sCJ.siM(iUt + Q) где - коэффициент передачи второй фазы тахогенераторной обмотки 15. Выходное напряжение сумматора 6 равно 6 Кт-КД цКг- Ua,-a;3 sinCuJt j3), где К - коэффициент усиления суматора 6 (в данном случае принимаем, что коэффициенты усиления -сумматора 6 по обоим входам одинаковы) , Щ Kj (т.е. в данном случае принимаем, что коэффициенты передачи ли крутизна обеих фаз тахогенераторных обмоток 14 и 15 одинаковы). Напряжение с выхода сумматора 6 поступает на вход усилителя 8 мощности, который имеет внутреннюю обратную связь по току, поэтому его выходной ток пропорционален входному напряжению независимо от величины нагрузки. Выход усилителя 8 мощности соединен с фазной двигательной 067 моткой 12. Выходной ток усилителя мощности, т.е. ток фазной двигательной обмотки выражается формулой ) где Kg - коэффициент передачи усилителя 8 мощности, имеющий размерность поводимости.
Аналогичным образом работает второй канал регулирования, поэтому ток фазы двигательной обмотки 12 выражается формулой
i,j vr K-jCk-jk-jUg.-aJlcosCun -V) ,
где KjjKjjK jKj и К - коэффициенты передачи блоков 3,5,7,9 и обмотки 15
Намагничивающая сила фазы двигательной обмотки 12 равна
Р„ KT S Г F- tx-fu-Ug,-(Jcos(, F,i« t(.-K,,.K.(.K.}.) -коэффициент намаггде К,К,, К, ничивающей силы; -число витков фазы W,5 двигательной обмотки;, - коэффициент передачи сумматоров; -коэффициент передачи усилителей мощности;-коэффициент передаK,K., чи интеграторов; Kj - коэффициенту передачи блоков умножения т.е. принимается, что эквивалентные блоки обоих каналов регулирования имеют одинаковые характеристики. Если ось деи::твительных чисел комплексной плос:кости совместить с осью фазы дЕигательной обмотки 13, а ось мнимых чисел - с осью фазы дви гательмой обмотки 12, то результирующая пространственная намагничивающая сила составит (ч((f u-Ue. Таким образом, результирующая намагничивающая сила вращается в пространстве с той же скоростью, что и вал двигателя, а ее ось всегда сов падает с осью магнитной нейтрали вра щающегося индуктора. Это обуславливает наличие момента вращения в любом положении индуктора. Момент вращения электрической машины МФ& равен произведению магнитногопотока возбуждения Ф а намагничивающей силы M.fj-F.kdf. KU UB,-CJ) , где К Фв- KT К,,- KIJM- Хр- W. В установленном режиме М« где Мь - статический момент нагрузки
т.е. К-(К, Кц Ugj, -W) MC, откуда
К. Ugj - MC/K. Так как коэффиЫ К,
циент К всегда достато.но велик, то U) iKj К,| и ,( , т.е. скорость вращения вала синхронно-редук.торной электрической машины пропорциональна величине входного сигнала
При скорости вращения, равной нулю, входные напряжения тахогенераторных обмоток 14 и 15 равны нулю, поэтому для запуска системы необходимо задать интеграторам 2 и 3 начальные условия, т.е. подать на их входы напряжения, соответствующие положению ротора.
Сначала подается напряжение на обмотку 11 возбуждения, а через некоторое время подается на вход системы
В связи с наливходной сигнал U
вх чием переходных процессов в электрической машине 1 конденсаторы, содержащиеся в интеграторах 2 и 3, заряжаются до величин, соответствующих начальной угловой фазе ротора f. Предлагаемое устройство позволяет повысить точность регулирования скорости примерно в три раза, а быстродействие - примерно в 4,5 раза. Формула изобретения 1 .Двухканальная система регулирования скорости, содержащая два канала регулирования, каждый из которых состоит из последовательно соединенных функционального преобразователя, сумматора и усилителя мощности, причем первый выход объекта регулирования соединен с сигнальным входом функционального преобразователя первого канала регулирования и вторым чходом сумматора второго канала регулирования, а второй вход объекта регулирования соединен с сигнальным входом функционального преобразователя второго канала регулирования и вторым входом сумматора первого канала регул 1рования, а входы объекта регулирования соединены с выходами усилителей мощности соответствующих каналов регулирования, отличающаяся тем, что, с целью повы- ; шения быстродействия и точности си- стемы, в ней управляющие входы функциональных преобразователей соединены между собой и подключены ко входу системы. 2. Система по п. 1отлича ющ а я с я тем, что функциональный преобразователь содержит последовательно соединенные интегратор и блок умножения, причем вход интегратора, второй вход и выход блока умножения подключены соответственно, к сигнальному и управляющему входам и выходу функционального преобразователя.
Источники информации, принятые во внимание при экспертизе
1.Авторское свияетельство СССР 433447, кл, G 05 В 11/06, 1972.
2.Новоселов Б.В. Проектирование квазиоптимальных следящих систем комбинированного регулирования. М., Энергия, 1972, с. 50.
3. Воронов А.А.Основы теории автоматического регулирования. М., Энергия, 1970, ч. 3, с. 212-256, рис. 8-2 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Безредукторный бесконтактный следящий электропривод | 1981 |
|
SU1001412A1 |
| Электропривод | 1988 |
|
SU1656652A1 |
| Электропривод переменного тока | 1987 |
|
SU1529392A1 |
| Вентильный электродвигатель | 1990 |
|
SU1750016A1 |
| Электропривод с частотно-токовым управлением | 1983 |
|
SU1111243A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1996 |
|
RU2109397C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД | 2003 |
|
RU2265950C2 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 2015 |
|
RU2588400C1 |
| Устройство для измерения скорости вращения асинхронного двигателя с фазным ротором | 1981 |
|
SU1010564A1 |
