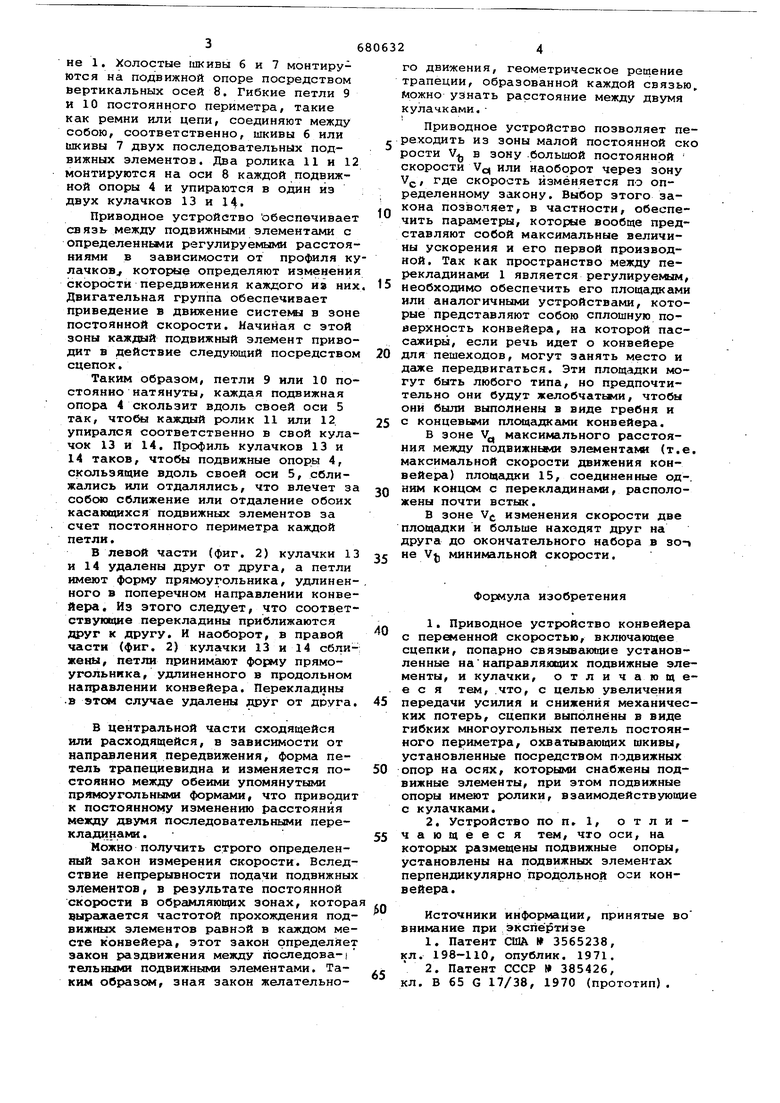
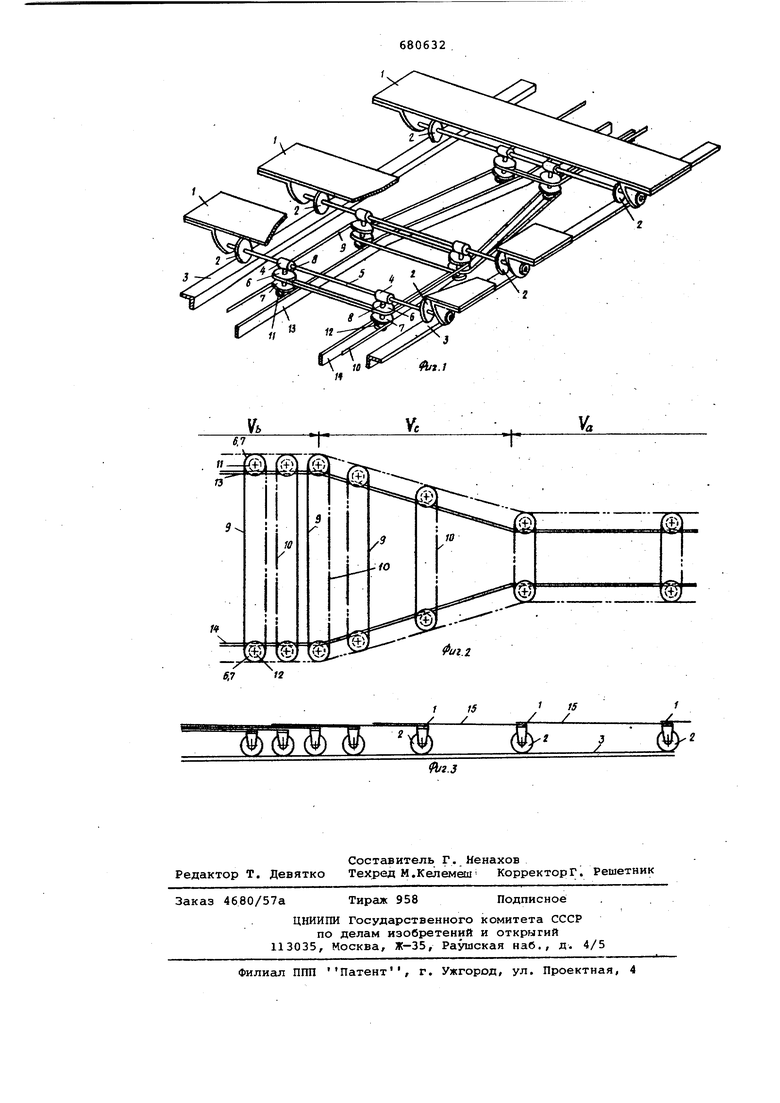
3 не 1. Холостые шкивы 6 и 7 монтируются на подвижной опоре посредством вертикальных осей 8, Гибкие петли 9 и 10 постоянного периметра, такие как ремни или цепи, соединяют между собою, соответственно, шкивы 6 или шкивы 7 двух последовательных подвижных элементов. Два ролика 11 и 12 монтируются на оси 8 каждой подвижной опоры 4 и упираются в один из двух кулачков 13 и 14, Приводное устройство обеспечивает связь между подвижными элементами с определенными регулируемыми расстояниями в зависимости от профиля ку лачков которые определяют изменения скорости передвижения каждого и них Двигательная группа обеспечивает приведение в движение системы в зоне постоянной скорости. Начиная с этой зоны каждый подвижный элемент приводит в действие следующий посредством сцепок. Таким образом, петли 9 или 10 постоянно натянуты, каждая подвижная опора 4 скользит вдоль своей оси 5 так, чтобы ка1ждый ролик 11 или 12. упирался соответственно в свой кулачок 13 и 14, Профиль кулачков 13 и 14 таков, чтобы подвижные опоры 4, скользящие вдоль своей оси 5, сближались или отдалялись, что влечет за собою сближение или отдаление обоих касающихся подвижных элементов за счет постоянного периметра каждой петли, В левой части (фиг, 2) кулачки 1 и 14 удалены друг от друга, а петли имеют форму прямоугольника, удлинен ного в поперечном направлении конве йера. Из этого следует, что соответ ствующие перекладины приближаются друг к другу, И наоборот, в правой части (фиг, 2) кулачки 13 и 14 сближены, петли принимают форму прямоугольника, удлиненного в продольном направлении конвейера. Перекладины в этом случае удалены друг от друга В центральной части сходящейся или расходящейся, в зависимости от направления передвижения, форма петель трапециевидна и изменяется постоянно между обеими упомянутыми прямоугольными формами, что приводи к постоянному изменению расстояния между двумя последовательными перекладинами. Можно получить строго определенный закон измерения скорости. Вслед ствие непрерывности подачи подвижны элементов, в результате постоянной скорости в обрамляющих зонах, котор выражается частотой прохождения под вижных элементов равной в каждом ме сте конвейера, этот закон определяе закон раздвижения между последовательными подвижными элементами. Таким образе, зная закон желательного движения, геометрическое решение трапеции, образованной каждой связью. Можно узнать расстояние между двумя кулачками,Приводное устройство позволяет переходить из зоны малой постоянной ско рости V в зону .большой постоянной скорости Vc, или наоборот через зону Vj., где скорость изменяется по определенному закону. Выбор этого закона позволяет, в частности, обеспечить параметры, которые вообще представляют собой максимальные величины ускорения и его первой производной. Так как пространство между перекладинами 1 является регулируемым, необходимо обеспечить его площадками или аналогичными устройствами, которые представляют собою сплошную поверхность конвейера, на которой пассажиры, если речь идет о конвейере для пешеходов, могут занять место и даже передвигаться. Эти площадки могут быть любого типа, но предпочтительно они будут желобчат 1И, чтобы они были выполнены в виде гребня и с концевыми площадкг1ми конвейера, В зоне V максимального расстояния между подвижнь ш элементами (т,е, максимальной скорости движения конвейера) площадки 15, соединенные од-, ним концом с переклгщинами, расположены почти встык, В зоне Vc изменения скорости две и больше находят друг на друга до окончательного набора в зо-i не V минимальной скорости. Формула изобретения 1,Приводное устройство конвейера с переменной скоростью, включающее сцепки, попарно связывающие установленные нанёшрёшляюоих подвижные элементы, и кулачки, отличающееся тем, что, с целью увеличения передачи усилия и снижения механических потерь, сцепки выполнены в виде гибких многоугольных петель постоянного периметра, охватывгиощих шкивы, установленные посредством подвижных опор на осях, которыми снабжены подвижные элементы, при этом подвижные опоры имеют ролики, взаимодействующие с кулачками, 2,Устройство поп, 1, отличающееся тем, что оси, на которых размещены подвижные опоры, установлены на подвижных элементах перпендикулярно продольной оси конвейера. Источники информации, принятые во внимание при экспертизе 1, Патент США 3565238, кл. 198-110, опублик, 1971. 2. Патент СССР 385426, кл, В 65 G 17/38, 1970 (прототип),
| название | год | авторы | номер документа |
|---|---|---|---|
| СУШИЛКА РОЛИКОВАЯ СЕКЦИОННАЯ С СОПЛОВЫМИ КОРОБАМИ, ПРИВОДОМ И МЕХАНИЗМАМИ ЗАГРУЗКИ И ВЫГРУЗКИ С ЛЕНТОЧНЫМ КОНВЕЙЕРОМ | 2009 |
|
RU2430004C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВОРСОВАННОЙ ТКАНИ | 1928 |
|
SU20569A1 |
| АВТОМАТИЗИРОВАННЫЙ МНОГОЭТАЖНЫЙ ГАРАЖ-СКЛАД И УСТРОЙСТВО ДЛЯ ПРОДОЛЬНОГО ПЕРЕМЕЩЕНИЯ ПОДДОНА | 2001 |
|
RU2212508C2 |
| Стенд для испытания роликоопор ленточного конвейера | 1983 |
|
SU1135696A1 |
| Мобильный буксировочный бугельный подъемник | 2016 |
|
RU2619352C1 |
| УСТРОЙСТВО ДЛЯ ПРИЖИМНОЙ ГИБКИ РАЗМЯГЧЕННОГО ЛИСТОВОГО СТЕКЛА | 1991 |
|
RU2009108C1 |
| ЛЕНТОЧНЫЙ ТРУБЧАТЫЙ КОНВЕЙЕР | 2008 |
|
RU2361799C1 |
| ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО И СПОСОБ ТРАНСПОРТИРОВАНИЯ СЛОЯ ШИНЫ | 2018 |
|
RU2750738C2 |
| ЛЕНТОЧНЫЙ ТРУБЧАТЫЙ КОНВЕЙЕР | 2008 |
|
RU2363645C1 |
| Роторно-конвейерная линия | 1980 |
|
SU952533A1 |
12
Ж
Фиг.г
15
t tS
JLL/
J
