Область и уровень техники
Изобретение относится к транспортирующему устройству и способу транспортирования слоя шины.
В US 3898116 А раскрыто устройство для изготовления конструктивного элемента для невулканизированной шины. Первый лист каркаса подают из запаса и транспортируют посредством основного подающего конвейера и основного конвейера для наслаивания к барабану. Дополнительные конвейеры для наслаивания предусмотрены для подачи дополнительных листов каркаса на основной конвейер для наслаивания. Дополнительные конвейеры для наслаивания предусмотрены с наклонной частью для подачи дополнительного листа каркаса под углом на основной конвейер для наслаивания.
Дополнительные листы каркаса имеют склонность деформироваться в зоне перехода от наклонной части дополнительных конвейеров для наслаивания к базовому конвейеру для наслаивания, например, в результате натяжения в материале. Дополнительный лист каркаса может начать деформироваться волнообразно, что делает невозможным точные отрезку, наслаивание и/или наложение листов каркаса.
Задача настоящего изобретения состоит в том, чтобы предложить транспортирующее устройство и способ транспортирования слоя шины, в которых деформация слоя шины может быть уменьшена или предотвращена.
Сущность изобретения
Согласно первому аспекту изобретения предложено транспортирующее устройство для транспортирования слоя шины, при этом транспортирующее устройство содержит поворотный конвейер с, по меньшей мере, одной бесконечной лентой или проволочной сеткой и первым шкивом, вторым шкивом и третьим шкивом, которые определяют границы минимальной петли для направления указанной, по меньшей мере, одной бесконечной ленты или проволочной сетки вдоль транспортирующей ветви и обратной ветви, при этом первый шкив определяет границу, по меньшей мере, первой части транспортирующей ветви, при этом второй шкив определяет границу, по меньшей мере, первой части обратной ветви, и при этом третий шкив расположен между первой частью транспортирующей ветви и первой частью обратной ветви, при этом третий шкив выполнен с возможностью поворота относительно первого шкива и второго шкива вокруг оси поворота, которая расположена в месте расположения центра поворота, находящемся на расстоянии от третьего шкива ближе к первому шкиву и второму шкиву, при этом третий шкив выполнен с возможностью поворота вокруг указанной оси поворота между первым положением при повороте и вторым положением при повороте для выравнивания первой части транспортирующей ветви относительно соответственно первой плоскости транспортирования и второй плоскости транспортирования, при этом минимальная петля имеет некоторую длину, при этом место расположения центра поворота выбрано так, что длина минимальной петли в случае, когда третий шкив находится в первом положении при повороте, является такой же, как длина минимальной петли в случае, когда третий шкив находится во втором положении при повороте, с учетом допустимого отклонения, составляющего менее 1 процента, по отношению к длине минимальной петли в случае, когда третий шкив находится во втором положении при повороте.
Поворотный конвейер может быть выровнен относительно или первой плоскости транспортирования, или второй плоскости транспортирования для приема слоя шины с плоскостей транспортирования в разных ориентированных положениях. При выравнивании поворотного конвейера относительно выбранной одной из плоскостей транспортирования может быть предотвращено резкое изменение направления слоя шины в зоне перехода от плоскостей транспортирования к поворотному конвейеру. Следовательно, могут быть уменьшены или даже предотвращены нежелательные побочные эффекты от устройства по предшествующему уровню техники, такие как волнистость. Поскольку длина минимальной петли сохраняется по существу одной и той же, имеется минимальное изменение натяжения или отсутствует изменение натяжения в данной, по меньшей мере, одной бесконечной ленте или проволочной сетке вдоль транспортирующей ветви и обратной ветви указанной минимальной петли во время поворота третьего шкива. Изменение длины минимальной петли в случае его наличия настолько мало, что оно не различимо для невооруженного глаза. Поскольку длина минимальной петли остается по существу одной и той же во время поворота, поворотный конвейер может функционировать без сложных средств натяжения и, следовательно, может сохранять относительно простую конструкцию.
Допустимое отклонение предпочтительно составляет менее 0,4 процента, более предпочтительно менее 0,1 процента и наиболее предпочтительно менее 0,05 процента. При уменьшении допустимого отклонения изменения натяжения в данной, по меньшей мере, одной бесконечной ленте или проволочной сетке, возникающие в результате поворота, могут быть уменьшены в еще больше степени. В частности, при указанном допустимом отклонении может быть предотвращена ситуация, при которой данная, по меньшей мере, одна лента или проволочная сетка растягивается до напряжения при растяжении, превышающего ее максимально допустимое (или подходящее для работы) напряжение при растяжении, указанное производителем. Как правило, максимально допустимое напряжение при растяжении ленты со стальными заделанными кордами достигается при степени растягивания, составляющей 0,4 процента.
В предпочтительном варианте осуществления допустимое отклонение составляет менее одной десятой миллиметра, предпочтительно менее одной двадцатой миллиметра и наиболее предпочтительно менее одной пятидесятой миллиметра. При уменьшении допустимого отклонения изменения натяжения в данной, по меньшей мере, одной бесконечной ленте или проволочной сетке, возникающие в результате поворота, могут быть уменьшены в еще большей степени.
В дополнительном предпочтительном варианте осуществления место расположения центра поворота выбрано так, что длина минимальной петли является одинаковой с учетом допустимого отклонения при любом положении третьего шкива при повороте вокруг оси поворота между первым положением при повороте и вторым положением при повороте. Следовательно, третий шкив может быть перемещен из первого положения при повороте во второе положение при повороте или в любое промежуточное положение при повороте без превышения допустимого отклонения.
В дополнительном предпочтительном варианте осуществления первый шкив и второй шкив имеют соответственно первую окружную периферию и вторую окружную периферию, при этом первая окружная периферия и вторая окружная периферия могут быть соединены посредством двух наружных касательных, которые определяют границы промежуточной зоны между первым шкивом и вторым шкивом, при этом место расположения центра поворота находится внутри данной промежуточной зоны. Было обнаружено, что в случае, когда место расположения центра поворота выбрано в указанной промежуточной зоне, можно сохранить минимальное допустимое отклонение длины петли.
В дополнительном предпочтительном варианте осуществления третий шкив имеет ось третьего шкива, которая выполнена с возможностью перемещения вдоль круговой траектории, которая является концентрической по отношению к месту расположения центра поворота, при этом ось третьего шкива находится в первой точке траектории и во второй точке траектории на круговой траектории, когда третий шкив находится соответственно в первом положении при повороте и втором положении при повороте, при этом первый шкив и второй шкив имеют соответственно первую окружную периферию и вторую окружную периферию, при этом круговая траектория между первой точкой траектории и второй точкой траектории образует дугу окружности, приблизительно соответствующую первой эллиптической траектории, которая задана первой фокусной точкой, расположенной на или в пределах первой окружной периферии, второй фокусной точкой, расположенной на или в пределах второй окружной периферии, и первой точкой траектории. Сумма расстояний между первой точкой траектории и каждой из фокусных точек является постоянной при перемещении первой точки траектории вдоль первой эллиптической траектории. Следовательно, когда обеспечивается перемещение оси третьего шкива вдоль дуги окружности, которая приблизительно соответствует первой эллиптической траектории, между первым положением при повороте и вторым положением при повороте длина петли между первым шкивом, вторым шкивом и третьим шкивом может также поддерживаться постоянной или по существу постоянной.
В варианте осуществления дуга окружности приблизительно соответствует средней из первой эллиптической траектории и второй эллиптической траектории, которая задана первой фокусной точкой, второй фокусной точкой и второй точкой траектории. Следовательно, при приближении к средней из первой эллиптической траектории и второй эллиптической траектории, определяемых третьим шкивом соответственно в первом положении при повороте и втором положении при повороте, место расположения центра поворота может быть оптимизировано так, что данная дуга окружности будет представлять собой наилучшую аппроксимацию обеих эллиптических траекторий.
В дополнительном варианте осуществления первая часть транспортирующей ветви проходит между первым шкивом и третьим шкивом и сходится по касательной с первой окружной периферией в первой фокусной точке, при этом первая часть обратной ветви проходит между вторым шкивом и третьим шкивом и сходится по касательной со второй окружной периферией во второй фокусной точке, при этом первая фокусная точка и вторая фокусная точка смещаются соответственно вдоль первой окружной периферии и второй окружной периферии при повороте третьего шкива между первым положением при повороте и вторым положением при повороте. Следовательно, первая фокусная точка и вторая фокусная точка не являются одинаковыми для первой эллиптической траектории и второй эллиптической траектории. Следовательно, первая эллиптическая траектория и вторая эллиптическая траектория не являются одинаковыми. При перемещении третьего шкива вдоль дуги окружности, которая приблизительно соответствует средней из первой эллиптической траектории и второй эллиптической траектории, между первой точкой траектории и второй точкой траектории длина петли между первым шкивом, вторым шкивом и третьим шкивом может поддерживаться постоянной или по существу постоянной.
В варианте осуществления первый шкив и второй шкив имеют соответственно ось первого шкива и ось второго шкива, при этом ось первого шкива и ось второго шкива могут быть соединены межцентровой линией, при этом место расположения центра поворота находится с противоположной стороны от межцентровой линии по отношению к третьему шкиву. Третий шкив выполнен с возможностью перемещения вдоль дуги окружности, которая приблизительно соответствует эллиптической траектории. Вследствие эксцентричности эллиптической траектории, то есть отклонения указанной эллиптической траектории от круговой, место расположения центра поворота в центре дуги окружности, как правило, будет находиться с противоположной стороны от центра эллиптической траектории или за центром эллиптической траектории по отношению к третьему шкиву. В данном иллюстративном варианте осуществления центр эллиптической траектории задан на или вблизи межцентровой линии.
В другом варианте осуществления первый шкив и второй шкив имеют соответственно ось первого шкива и ось второго шкива, при этом ось первого шкива и ось второго шкива могут быть соединены межцентровой линией, при этом место расположения центра поворота может быть спроецировано на межцентровую линию в направлении, нормальном к указанной межцентровой линии, на половине или приблизительно половине расстояния между осью первого шкива и осью второго шкива. Следовательно, дуга окружности может быть расположена вокруг места расположения центра поворота, которое может быть спроецировано в центр эллиптической траектории, которой, как предполагается, приблизительно соответствует данная дуга окружности.
В еще одном варианте осуществления первое положение при повороте и второе положение при повороте смещены друг относительно друга вокруг оси поворота на угол поворота, составляющий менее сорока градусов, предпочтительно менее тридцати градусов и наиболее предпочтительно менее двадцати пяти градусов. Когда угол поворота мал, эллиптическая траектория между первым положением при повороте и вторым положением при повороте начинает напоминать дугу окружности. Следовательно, отклонение дуги окружности, вдоль которой перемещается третий шкив, относительно эллиптической траектории может быть уменьшено до такой степени, что длина петли может поддерживаться одинаковой или по существу одинаковой.
В дополнительном варианте осуществления первое положение при повороте и второе положение при повороте смещены друг относительно друга вокруг места расположения центра поворота на угол поворота, составляющий, по меньшей мере, десять градусов, предпочтительно, по меньшей мере, пятнадцать градусов и наиболее предпочтительно, по меньшей мере, двадцать градусов. Таким образом, положения при повороте разнесены в достаточной степени для выравнивания поворотного конвейера относительно двух разных плоскостей транспортирования, которые смещены друг относительно друга на тот же угол.
В еще одном варианте осуществления поворотный конвейер содержит поворотный рычаг для обеспечения опоры для третьего шкива с возможностью поворота вокруг оси поворота. Указанный поворотный рычаг может обеспечить механическое направление перемещения третьего шкива вдоль дуги окружности вокруг оси поворота.
В варианте осуществления поворотный конвейер содержит привод поворота, который выполнен с возможностью приведения поворотного рычага в поворотное движение вокруг оси поворота для поворота третьего шкива между первым положением при повороте и вторым положением при повороте. Указанный привод поворота может воздействовать непосредственно на поворотный рычаг на оси поворота или в альтернативном варианте может контактно взаимодействовать с поворотным рычагом вдоль его длины, например, посредством использования поршня.
В варианте осуществления, по меньшей мере, один из множества шкивов представляет собой приводной шкив для приведения в движение данной, по меньшей мере, одной бесконечной ленты или проволочной сетки.
В варианте осуществления данная, по меньшей мере, одна бесконечная лента представляет собой зубчатую ленту, при этом данный, по меньшей мере, один приводной шкив представляет собой зубчатый приводной шкив, который выполнен с возможностью контактного взаимодействия с зубчатой лентой для приведения указанной зубчатой ленты в движение. Зубчатый приводной шкив может надежно сцепляться с зубчатой лентой. В частности, риск проскальзывания зубчатой ленты относительно зубчатого приводного шкива может быть уменьшен или даже устранен. Однако такой зубчатый приводной шкив требует жесткой зубчатой ленты, которая имеет постоянную или по существу постоянную длину петли. Следовательно, поворотный конвейер согласно изобретению особенно полезен при использовании зубчатого приводного шкива для приведения зубчатой ленты в движение.
Предпочтительно второй шкив представляет собой приводной шкив.
В варианте осуществления транспортирующая ветвь данной, по меньшей мере, одной бесконечной ленты или проволочной сетки выполнена с возможностью приведения ее в движение в направлении транспортирования, при этом третий шкив представляет собой задний шкив по отношению к указанному направлению транспортирования. Следовательно, третий шкив может быть повернут для выравнивания первой части транспортирующей ветви относительно первой плоскости транспортирования или второй плоскости транспортирования для приема слоя шины в направлении транспортирования на поворотном конвейере.
В варианте осуществления поворотный конвейер содержит четвертый шкив со стороны первого шкива и второго шкива, противоположной по отношению к третьему шкиву, при этом четвертый шкив выполнен с возможностью образования – вместе с первым шкивом, – по меньшей мере, второй части транспортирующей ветви по ходу впереди первой части транспортирующей ветви в направлении транспортирования. Таким образом, четвертый шкив обеспечивает увеличение реальной петли данной, по меньшей мере, одной бесконечной ленты или проволочной сетки по отношению к минимальной петле между первым шкивом, вторым шкивом и третьим шкивом. Указанная вторая часть транспортирующей ветви может иметь ориентацию, отличающуюся от ориентации первой части транспортирующей ветви. В частности, вторая часть транспортирующей ветви может удерживаться в неподвижном состоянии во время поворота первой части транспортирующей ветви относительно второй части транспортирующей ветви.
В варианте осуществления четвертый шкив представляет собой передний шкив относительно направления транспортирования. Следовательно, поворотный конвейер выполнен с возможностью выгрузки слоя шины со второй части транспортирующей ветви, расположенной впереди по ходу в направлении транспортирования.
В варианте осуществления поворотный конвейер содержит множество бесконечных лент или проволочных сеток, при этом каждая бесконечная лента или проволочная сетка проходит в виде реальной петли вокруг множества шкивов, при этом транспортирующие ветви соответствующих бесконечных лент или проволочных сеток выполнены с возможностью приведения их в движение в направлении транспортирования, при этом бесконечные ленты или проволочные сетки расположены рядом друг с другом в боковом направлении, перпендикулярном к направлению транспортирования. При выполнении множества бесконечных лент или проволочных сеток, расположенных рядом друг с другом, может быть уменьшен риск соскальзывания бесконечных лент или проволочных сеток к боковой стороне поворотного конвейера.
В варианте осуществления бесконечные ленты или проволочные сетки расположены на расстоянии друг от друга в боковом направлении. При размещении указанных бесконечных лент или проволочных сеток на расстоянии друг от друга может быть предотвращено нежелательное взаимодействие между бесконечными лентами или проволочными сетками. Данное расстояние/данный промежуток может дополнительно обеспечить возможность перемещения других компонентов поворотного конвейера через указанный промежуток, например, для выполнения таких операций, как удерживание, подъем, обнаружение, маркирование, пробивка, измерение или разрезание, на слое шины в зоне транспортирующей ветви.
В варианте осуществления поворотный конвейер содержит резальное устройство, которое выполнено с возможностью перемещения из отведенного положения, в котором оно находится в пределах реальных петель соответствующих бесконечных лент или проволочных сеток, в положение при разрезании, в котором резальное устройство выступает, по меньшей мере частично, наружу по отношению к реальным петлям и через промежуток между соответствующими бесконечными лентами или проволочными сетками в зоне транспортирующей ветви. Указанное резальное устройство может быть использовано для разрезания слоя шины в зоне транспортирующей ветви. Резальное устройство может быть, по меньшей мере частично, встроено или вставлено внутри петли бесконечных лент или проволочных сеток, при этом промежуток обеспечивает возможность выдвигания, по меньшей мере, части резального устройства через указанный промежуток для выполнения операции разрезания на слое шины.
В варианте осуществления, который включает в себя вышеупомянутое резальное устройство, резальное устройство выполнено с возможностью выступания, по меньшей мере частично, наружу по отношению к реальным петлям и через промежуток между соответствующими бесконечными лентами или проволочными сетками в зоне второй части транспортирующей ветви. Указанная вторая часть транспортирующей ветви может быть расположена независимо от поворачивающейся первой части транспортирующей ветви. Более конкретно, вторая часть транспортирующей ветви может удерживаться в неподвижном состоянии для обеспечения возможности точного разрезания слоя шины.
В дополнительном варианте осуществления резальное устройство содержит балку, которая расположена так, что она проходит с внутренней стороны реальных петель соответствующих бесконечных лент или проволочных сеток рядом с транспортирующей ветвью, и опору, которая выполнена с возможностью перемещения относительно указанной балки через промежуток между соответствующими бесконечными лентами или проволочными сетками в зоне транспортирующей ветви из отведенного положения в положение при разрезании. Опора может быть использована для взаимодействия с ножом, например, для обеспечения опоры для слоя шины относительно указанного ножа для обеспечения возможности точного разрезания. Более конкретно, опора может обеспечить подъем, по меньшей мере, части слоя шины над бесконечными лентами или проволочными сетками для создания возможности врезания ножа в слой шины без врезания в бесконечные ленты или проволочные сетки.
В варианте осуществления резальное устройство содержит множество поднимающих элементов, которые выполнены с возможностью перемещения относительно указанной балки через промежуток между соответствующими бесконечными лентами или проволочными сетками в зоне транспортирующей ветви из отведенного положения в положение при разрезании. Указанные поднимающие элементы могут быть использованы для подъема слоя шины вдоль линии разрезания для обеспечения возможности врезания ножа в слой шины вдоль указанной линии разрезания без врезания в бесконечные ленты или проволочные сетки.
В дополнительном варианте осуществления балка содержит множество опорных элементов, которые расположены так, что они находятся на одном уровне или по существу на одном уровне с бесконечными лентами или проволочными сетками в промежутке между указанными бесконечными лентами или проволочными сетками в зоне транспортирующей ветви для обеспечения опоры для слоя шины. Опорные элементы могут предотвратить провисание слоя шины между бесконечными лентами или проволочными сетками.
В дополнительном варианте осуществления балка имеет скошенную кромку, обращенную в направлении, противоположном направлению транспортирования, для отклонения слоя шины над балкой в указанном направлении транспортирования. Следовательно, может быть предотвращена ситуация, при которой балка врезается в слой шины при перемещении слоя шины над балкой в направлении транспортирования.
В дополнительном варианте осуществления балка проходит вдоль линии разрезания для взаимодействия с ножом вдоль указанной линии разрезания, при этом линия разрезания находится на расстоянии от четвертого шкива, составляющем пятьдесят миллиметров или менее и предпочтительно тридцать миллиметров или менее. Относительно малое расстояние от линии разрезания до четвертого шкива позволяет отрезать относительно короткую часть слоя шины и выгрузить указанную короткую часть, например, в качестве отходов, перед отрезкой последующей части слоя шины.
В предпочтительном варианте осуществления первый шкив, второй шкив и/или третий шкив предусмотрены с множеством проходящих в направлении вдоль окружности, направляющих элементов в промежутке между соответствующими бесконечными лентами или проволочными сетками для направления соответствующих бесконечных лент или проволочных сеток. Указанные направляющие элементы могут отклонять и/или удерживать бесконечные ленты или проволочные сетки на соответствующих шкивах и предотвращать смещение бесконечных лент или проволочных сеток друг на друга или к боковым сторонам указанных шкивов.
В варианте осуществления направляющие элементы расположены так, что они находятся на одном уровне или по существу на одном уровне с бесконечными лентами или проволочными сетками в промежутке между указанными бесконечными лентами или проволочными сетками в зоне транспортирующей ветви для обеспечения опоры для слоя шины. Следовательно, подобно опорным элементам на балке, направляющие элементы могут предотвратить провисание слоя шины между бесконечными лентами или проволочными сетками.
В еще одном варианте осуществления транспортирующее устройство дополнительно содержит первый подающий конвейер и второй подающий конвейер, проходящие соответственно в первой плоскости транспортирования и второй плоскости транспортирования по ходу позади поворотного конвейера, и разгрузочный конвейер, проходящий в третьей плоскости транспортирования по ходу впереди поворотного конвейера в направлении транспортирования, при этом поворотный конвейер выполнен с возможностью транспортирования первого слоя шины от первого подающего конвейера к разгрузочному конвейеру, когда первая часть транспортирующей ветви выровнена относительно первой плоскости транспортирования, и с возможностью транспортирования второго слоя шины от второго подающего конвейера к разгрузочному конвейеру, когда первая часть транспортирующей ветви выровнена относительно второй плоскости транспортирования. Следовательно, поворотный конвейер может быть рациональным образом размещен между первым подающим конвейером и вторым подающим конвейером, расположенными по ходу позади поворотного конвейера, и разгрузочным конвейером, расположенным по ходу впереди поворотного конвейера. Один или более слоев шины могут быть избирательно приняты с первого подающего конвейера или второго подающего конвейера и выгружены на разгрузочный конвейер для дальнейшей обработки. Данная установка, как правило, используется на станции сборки каркасов, на которой несколько листов каркаса подают к транспортирующему устройству, накладывают друг на друга и/или разрезают на транспортирующем устройстве перед выгрузкой на барабан для сборки каркасов.
В варианте осуществления первая плоскость транспортирования и третья плоскость транспортирования являются параллельными, по существу параллельными или отклоняются друг от друга не более, чем на два градуса. Следовательно, слой шины может транспортироваться от первого подающего конвейера, поверх транспортирующей ветви на поворотном конвейере и на разгрузочный конвейер в по существу горизонтальной плоскости транспортирования. Следовательно, может быть предотвращена волнистость, возникающая в результате резких изменений направления слоя шины.
В дополнительном варианте осуществления вторая плоскость транспортирования смещена на угол поворота, составляющий менее сорока градусов, предпочтительно менее тридцати градусов и наиболее предпочтительно менее двадцати пяти градусов, относительно первой плоскости транспортирования. Таким образом, первая часть транспортирующей ветви может быть выровнена относительно или первой плоскости транспортирования, или второй плоскости транспортирования. При выравнивании первой части транспортирующей ветви относительно второй плоскости транспортирования слой шины может приниматься на первой части транспортирующей ветви в горизонтальной плоскости транспортирования для предотвращения волнистости слоя шины в зоне перехода от второго подающего конвейера к поворотному конвейеру.
Согласно второму аспекту изобретения предложен способ транспортирования слоя шины посредством использования вышеупомянутого транспортирующего устройства, при этом способ включает этап поворота третьего шкива относительно первого шкива и второго шкива вокруг оси поворота между первым положением при повороте и вторым положением при повороте при сохранении одинаковой длины минимальной петли с учетом допустимого отклонения, когда третий шкив находится в первом положении при повороте и во втором положении при повороте.
Способ относится к осуществлению транспортирующего устройства согласно первому аспекту изобретения на практике. Следовательно, его преимущества соответствуют преимуществам транспортирующего устройства и соответствующих вариантов его осуществления и не будут повторены в дальнейшем.
В предпочтительном варианте осуществления способа длина минимальной петли сохраняется одинаковой с учетом допустимого отклонения для любого положения при повороте третьего шкива вокруг оси поворота между первым положением при повороте и вторым положением при повороте.
В дополнительном предпочтительном варианте осуществления способа транспортирующее устройство дополнительно содержит первый подающий конвейер и второй подающий конвейер, проходящие соответственно в первой плоскости транспортирования и второй плоскости транспортирования по ходу позади поворотного конвейера, и разгрузочный конвейер, проходящий в третьей плоскости транспортирования по ходу впереди поворотного конвейера в направлении транспортирования, при этом способ дополнительно включает этап использования поворотного конвейера для транспортирования первого слоя шины от первого подающего конвейера к разгрузочному конвейеру, когда первая часть транспортирующей ветви выровнена относительно первой плоскости транспортирования, и для транспортирования второго слоя шины от второго подающего конвейера к разгрузочному конвейеру, когда первая часть транспортирующей ветви выровнена относительно второй плоскости транспортирования.
В варианте осуществления способ дополнительно включает этапы отрезки части первого слоя шины или второго слоя шины в зоне транспортирующей ветви поворотного конвейера, выгрузки отрезанной части на разгрузочный конвейер и отвода остальной части первого слоя шины или второго слоя шины в направлении отвода, противоположном направлению транспортирования. Слой шины содержит липкий резиновый материал. Отвод остальной части слоя шины может обеспечить предотвращение ситуации, при которой отрезанная часть слоя шины снова прикрепляется или прилипает к остальной части слоя шины. Таким образом, отрезанная часть слоя шины может быть выгружена надежным образом.
В другом варианте осуществления способ дополнительно включает этап замены данной, по меньшей мере, одной бесконечной ленты или проволочной сетки во время технического обслуживания и текущего ремонта, при этом данная, по меньшей мере, одна бесконечная лента или проволочная сетка выполнена с возможностью снятия с первого шкива, второго шкива и третьего шкива в боковом направлении, параллельном оси поворота. Следовательно, бесконечная лента или проволочная сетка может быть легко снята и заменена новой бесконечной лентой просто посредством ее сдвигания с поворотного конвейера в боковом направлении.
Различные аспекты и признаки, описанные и показанные в описании, могут быть применены по отдельности во всех случаях, где это возможно. Эти отдельные аспекты, в частности, аспекты и признаки, описанные в приложенных зависимых пунктах формулы изобретения, могут быть сделаны предметом выделенных патентных заявок.
Краткое описание чертежей
Изобретение будет разъяснено на основе иллюстративного варианта осуществления, показанного на приложенных схематических чертежах, на которых:
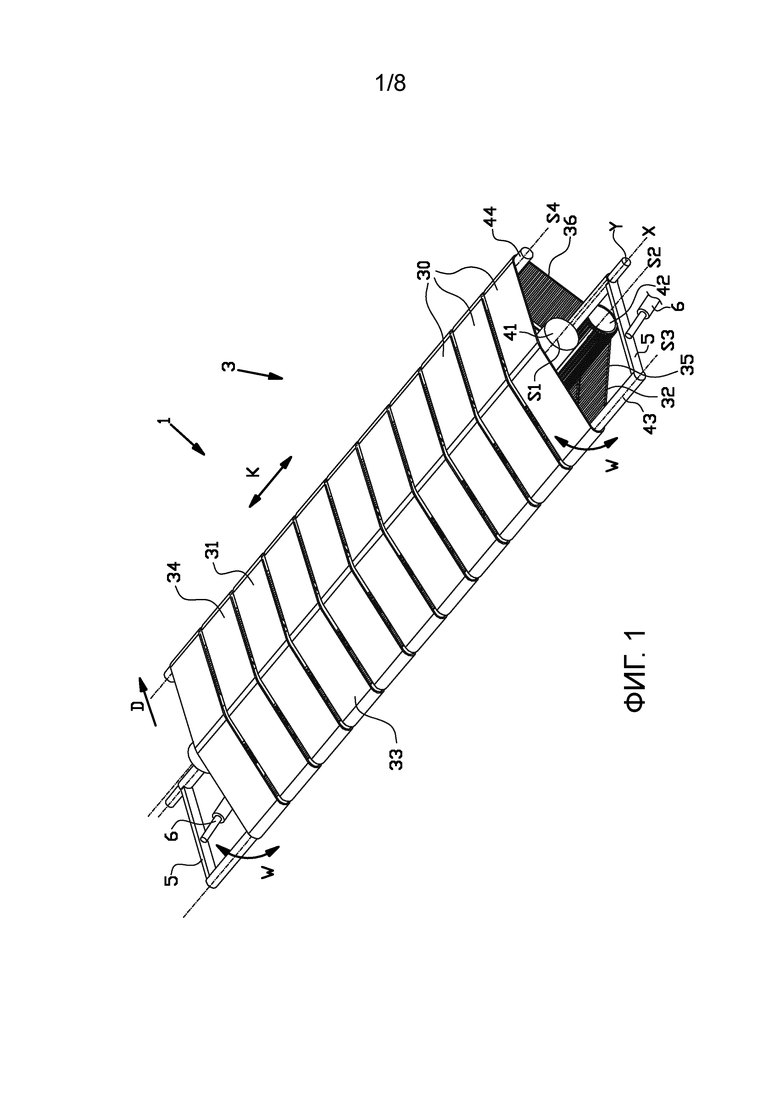
фиг.1 - изометрическое изображение транспортирующего устройства согласно первому иллюстративному варианту осуществления изобретения;
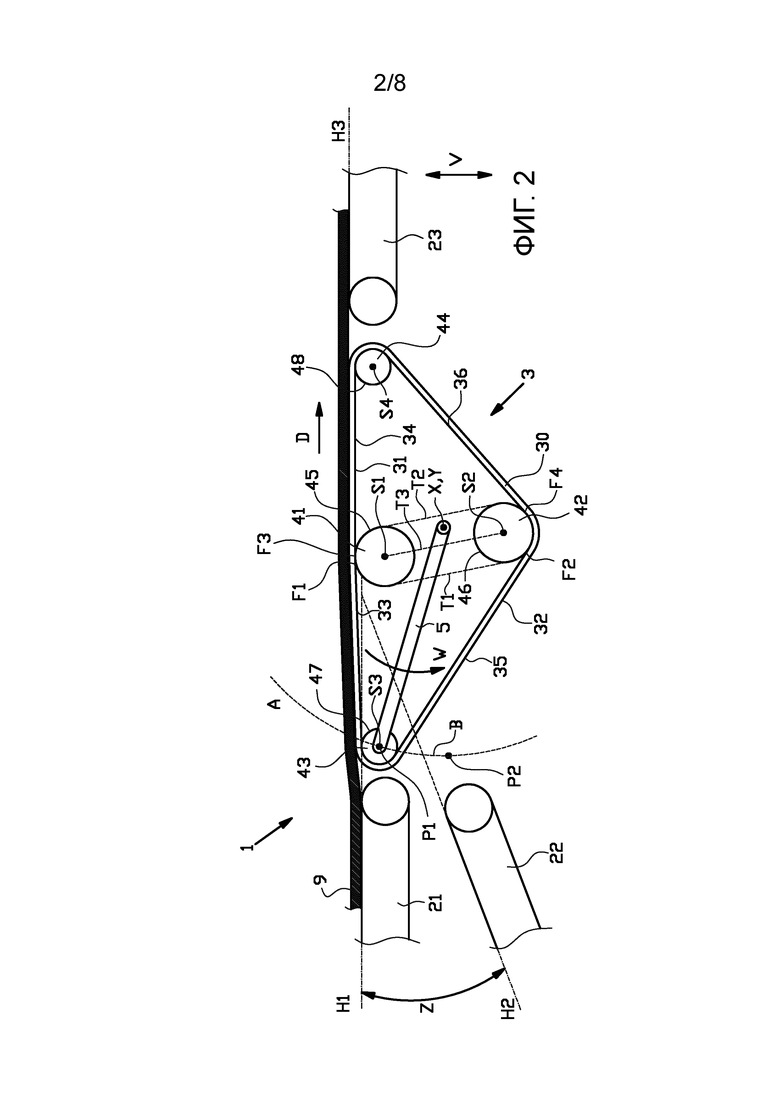
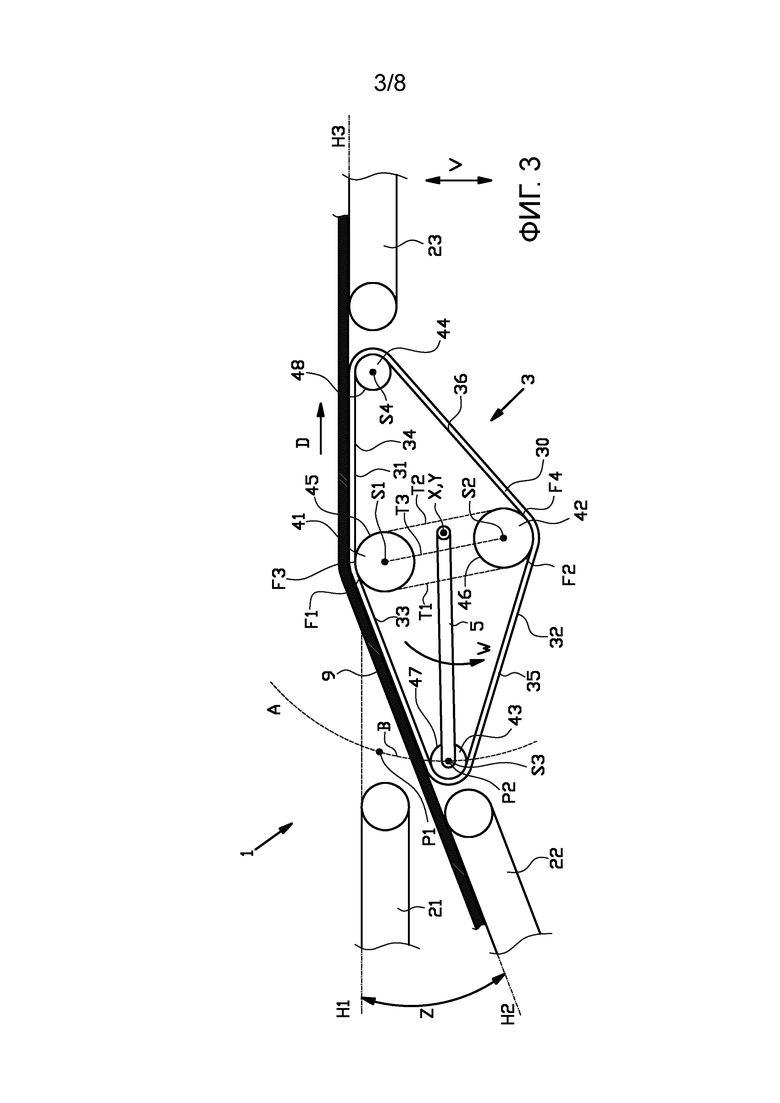
фиг.2 и 3 - виды сбоку транспортирующего устройства с фиг.1;
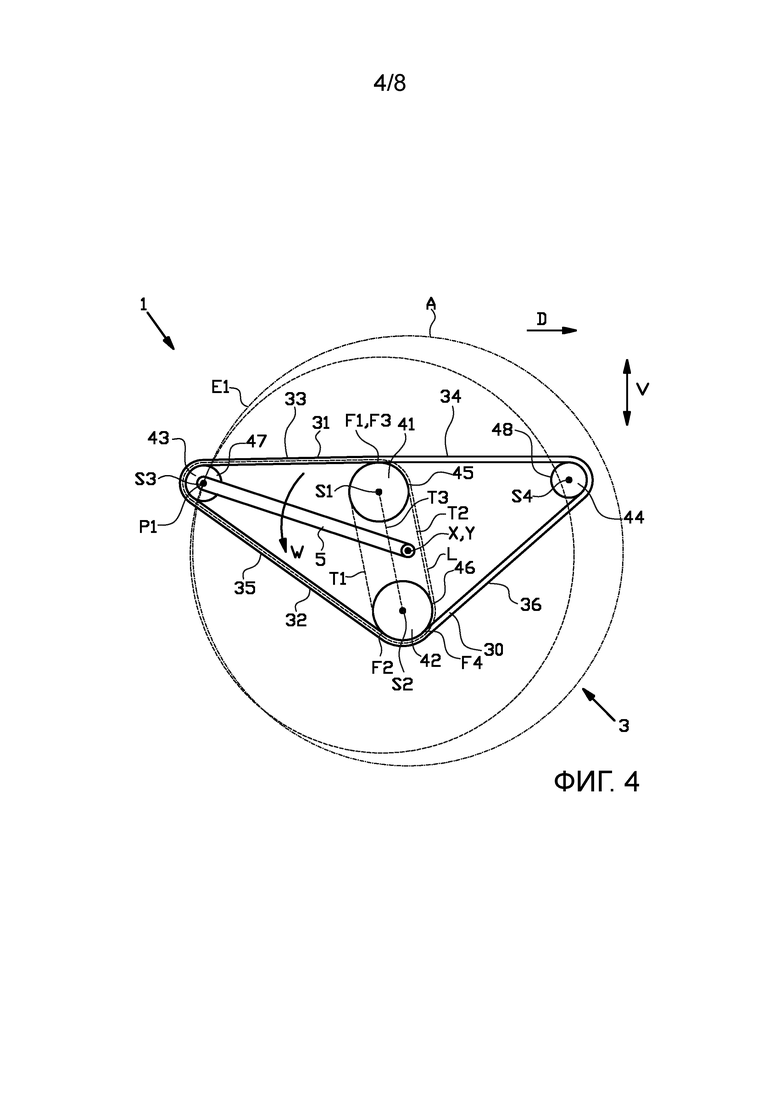
фиг.4, 5 и 6 - виды сбоку транспортирующего устройства с фиг.1 в трех разных положениях при повороте;
фиг.7 - изометрическое изображение альтернативного транспортирующего устройства согласно второму иллюстративному варианту осуществления изобретения; и
фиг.8 - вид сбоку дополнительного альтернативного транспортирующего устройства согласно третьему иллюстративному варианту осуществления изобретения.
Подробное описание изобретения
Фиг.1 показывает транспортирующее устройство 1 с поворотным конвейером 3. Как показано на фиг.2 и 3, транспортирующее устройство 1 дополнительно содержит первый подающий конвейер 21, второй подающий конвейер 22 и разгрузочный конвейер 23. Поворотный конвейер 3 выполнен с возможностью транспортирования слоя 9 шины в направлении D транспортирования от одного из первого подающего конвейера 21 и второго подающего конвейера 22, расположенных по ходу позади указанного поворотного конвейера 3 в направлении D транспортирования, к разгрузочному конвейеру 23, расположенному по ходу впереди поворотного конвейера 3 в направлении D транспортирования. Указанный поворотный конвейер 3 может быть использован для избирательного приема одного или более слоев 9 шины с первого подающего конвейера 21 и второго подающего конвейера 22. Это, например, целесообразно на станции сборки каркасов, где слои 9 шины в виде листов каркаса подают к транспортирующему устройству 1, накладывают друг на друга и/или разрезают на транспортирующем устройстве 1 перед выгрузкой на барабан (непоказанный) для сборки каркасов.
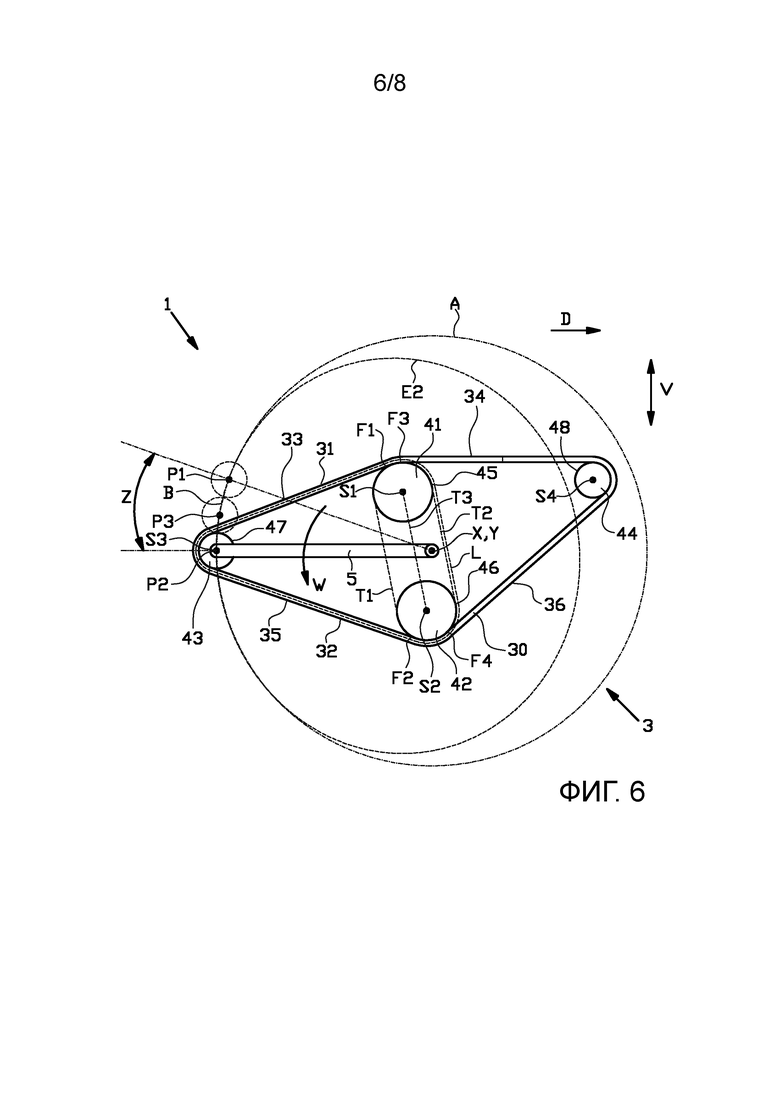
Как показано на фиг.2 и 3, первый подающий конвейер 21 и второй подающий конвейер 22 проходят соответственно в первой плоскости Н1 транспортирования и второй плоскости Н2 транспортирования. Разгрузочный конвейер 23 проходит в третьей плоскости Н3 транспортирования. Первая плоскость Н1 транспортирования и третья плоскость Н3 транспортирования предпочтительно выровнены, являются копланарными, параллельными, по существу параллельными или отклоняются друг от друга не более, чем на два градуса. Следовательно, слой 9 шины может транспортироваться от первого подающего конвейера 21, поверх поворотного конвейера 3 и на разгрузочный конвейер 23 в по существу горизонтальной плоскости транспортирования. Вторая плоскость Н2 транспортирования смещена на угол Z поворота, составляющий менее сорока градусов, предпочтительно менее тридцати градусов и наиболее предпочтительно менее двадцати пяти градусов, относительно первой плоскости Н1 транспортирования. В данном иллюстративном варианте осуществления вторая плоскость Н2 транспортирования проходит ниже первой плоскости Н1 транспортирования.
Как лучше всего видно на фиг.1, поворотный конвейер 3 содержит множество бесконечных лент 30 для транспортирования слоя 9 шины и множество шкивов 41, 42, 43, 44 для направления указанного множества бесконечных лент 30 в виде петли вокруг указанных шкивов 41–44. Бесконечные ленты 30 предпочтительно представляют собой зубчатые ленты. Зубья предусмотрены с внутренней стороны петли. Петля содержит транспортирующую ветвь 31 и обратную ветвь 32. Транспортирующая ветвь 31 представляет собой ту ветвь петли, которая обеспечивает удерживание и транспортирование слоя 9 шины. Петля имеет некоторую длину петли. Каждая из данных одной или более бесконечных лент 30 имеет длину, которая соответствует указанной длине петли. В этом иллюстративном варианте осуществления транспортирующая ветвь 31 представляет собой верхнюю ветвь петли, и обратная ветвь 32 представляет собой нижнюю ветвь петли.
В альтернативном варианте осуществления (непоказанном) поворотный конвейер 3 может содержать одну бесконечную ленту 30 вместо множества бесконечных лент 30. Множество бесконечных лент 30 предпочтительны, поскольку с ними легче обращаться, их легче заменять, и уменьшается вероятность их смещения/соскальзывания с боковых сторон шкивов 41–44. В дополнительном альтернативном варианте осуществления (непоказанном) бесконечные ленты 30 могут представлять собой бесконечные проволочные сетки.
Как лучше всего видно на фиг.2–6, множество шкивов 41–44 включает первый шкив 41, который определяет границу транспортирующей ветви 31, второй шкив 42, который определяет границу обратной ветви 32, и третий шкив 43, который расположен между транспортирующей ветвью 31 и обратной ветвью 32. В этом иллюстративном варианте осуществления третий шкив 43 представляет собой задний шкив по отношению к направлению D транспортирования, и множество шкивов 41–44 дополнительно включает четвертый шкив 44, который расположен между транспортирующей ветвью 31 и обратной ветвью 32 со стороны первого шкива 41 и второго шкива 42, противоположной по отношению к третьему шкиву 43. Поворотный конвейер 3 может содержать пятый или дополнительные шкивы (не показано). Первый шкив 41, второй шкив 42, третий шкив 43 и четвертый шкив 44 выполнены с возможностью вращения вокруг соответственно оси S1 первого шкива, оси S2 второго шкива, оси S3 третьего шкива и оси S4 четвертого шкива. Первый шкив 41, второй шкив 42, третий шкив 43 и четвертый шкив 44 имеют соответственно первую окружную периферию 45, вторую окружную периферию 46, третью окружную периферию 47 и четвертую окружную периферию 48, концентрические по отношению к осям S1–S4 соответствующих шкивов. Один из шкивов 41–44 представляет собой приводной шкив, предпочтительно зубчатый приводной шкив. В данном иллюстративном варианте осуществления второй шкив 42 представляет собой зубчатый приводной шкив. Зубья зубчатого приводного шкива выполнены с возможностью зацепления с зубьями данных одной или более зубчатых лент 30.
Более конкретно, первый шкив 41 выполнен с возможностью образования – вместе с третьим шкивом 43 – первой части 33 транспортирующей ветви 31. Первый шкив 41 выполнен с возможностью образования – вместе с четвертым шкивом 44 – второй части 34 транспортирующей ветви 31 по ходу за первой частью 33 транспортирующей ветви 31 по отношению к направлению D транспортирования. Аналогичным образом, второй шкив 42 выполнен с возможностью образования – вместе с третьим шкивом 43 – первой части 35 обратной ветви 32. Второй шкив 42 выполнен с возможностью образования – вместе с четвертым шкивом 44 – второй части 36 обратной ветви 32 по ходу за первой частью 35 обратной ветви 32 по отношению к направлению D транспортирования. Следовательно, первый шкив 41 расположен между первой частью 33 и второй частью 34 транспортирующей ветви 31, второй шкив 42 расположен между первой частью 35 и второй частью 36 обратной ветви 32, третий шкив 43 расположен между первой частью 33 транспортирующей ветви 31 и первой частью 35 обратной ветви 32, и четвертый шкив 44 расположен между второй частью 34 транспортирующей ветви 31 и второй частью 36 обратной ветви 32.
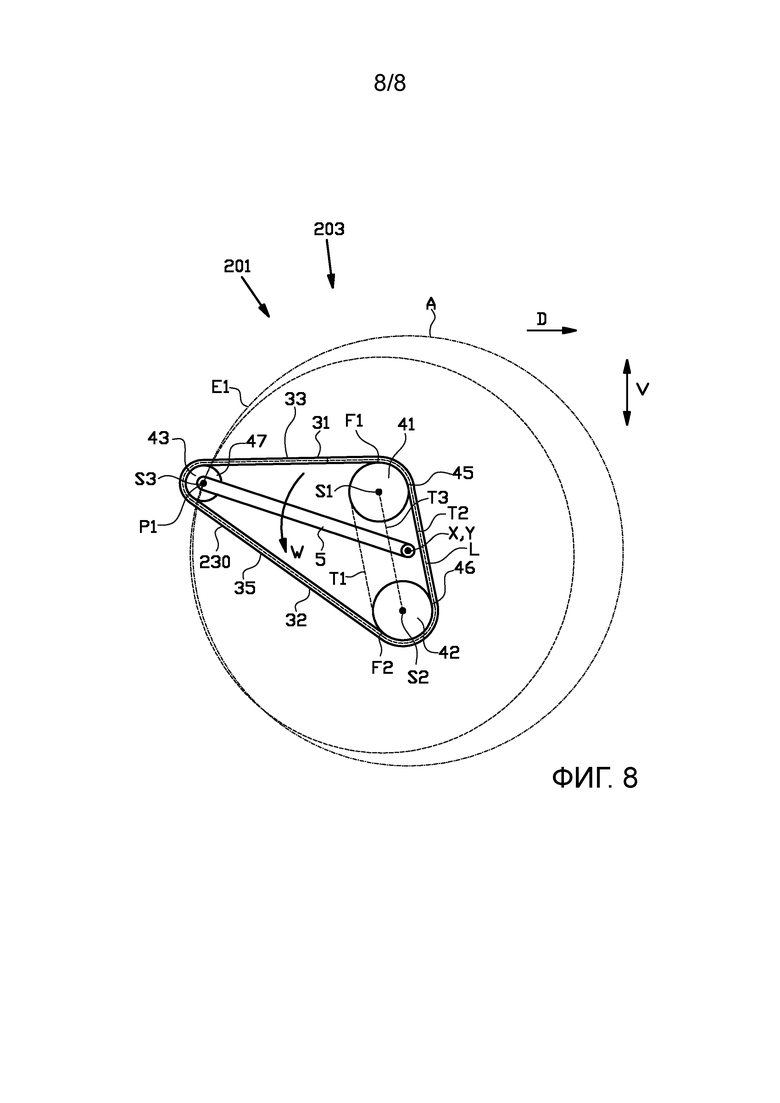
В этом иллюстративном варианте осуществления первый шкив 41, второй шкив 42 и четвертый шкив 44 находятся в фиксированных относительных положениях друг относительно друга. Следовательно, длина бесконечных лент 30 во второй части 34 транспортирующей ветви 31 и второй части 36 обратной ветви 32 остается постоянной независимо от поворота третьего шкива 43. Следовательно, четвертый шкив 44 является в целом возможным, но необязательным. Фиг.8 показывает альтернативное транспортирующее устройство 201 с поворотным конвейером 203, в котором четвертый шкив 44 исключен и в котором бесконечные ленты 230 проходят от первого шкива 41 непосредственно ко второму шкиву 42. В альтернативном варианте транспортирующее устройство может быть предусмотрено с четвертым или дополнительными шкивами (непоказанными), которые не должны оказывать никакого влияния на минимальную петлю L, проходящую вокруг первого шкива 41, второго шкива 42 и третьего шкива 43.
Для разъяснения настоящего изобретения петля, проходящая вокруг первого шкива 41, второго шкива 42 и третьего шкива 43, упоминается как «минимальная петля» L, и реальная петля бесконечных лент 30, 230, проходящих вокруг множества шкивов 41–44 независимо от того, включает ли данное множество четвертый шкив 44 или нет, упоминается как «реальная петля». В системе с тремя шкивами, представляющими собой первый шкив 41, второй шкив 42 и третий шкив 43, реальные петли бесконечных лент 30 соответствуют минимальной петле L. Когда реальные петли «охватывают» четвертый шкив 44 или дополнительные шкивы, реальные петли будут больше минимальной петли L, которая по–прежнему виртуально проходит вокруг первого шкива 41, второго шкива 42 и третьего шкива 43.
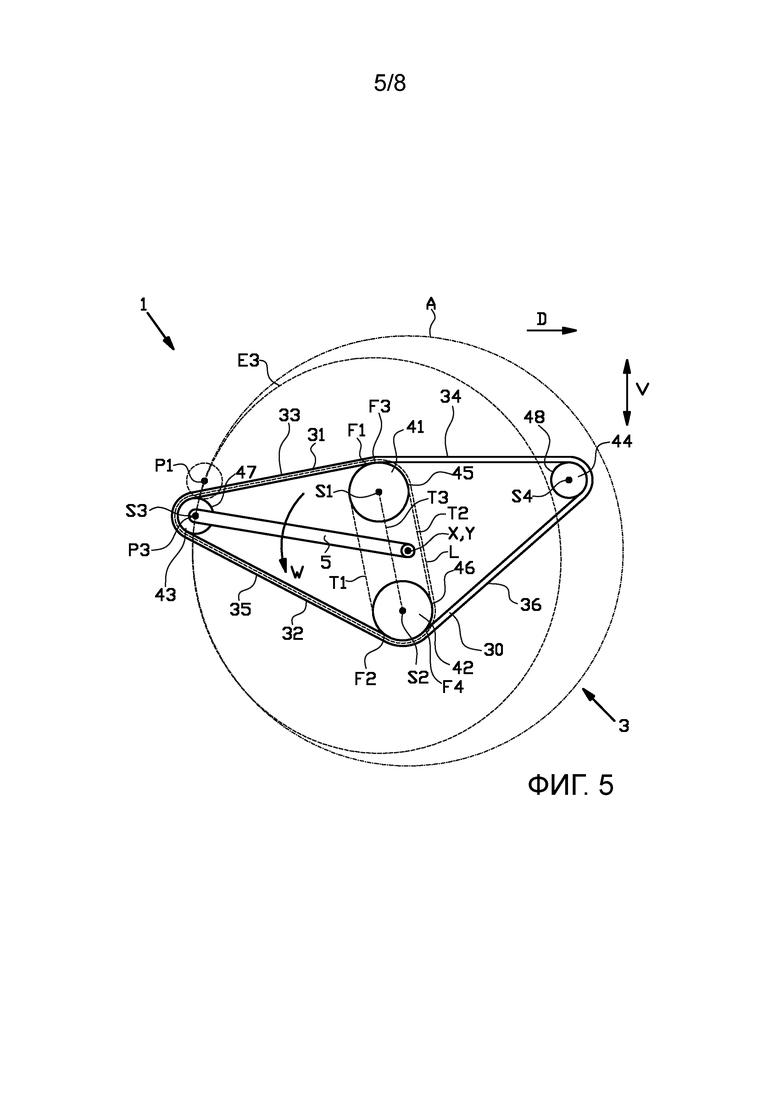
Как показано на фиг.1, 2 и 3, третий шкив 43 выполнен с возможностью поворота при поворотном движении W вокруг оси Х поворота относительно первого шкива 41 и второго шкива 42. Ось Х поворота расположена в месте Y расположения центра поворота, находящемся на расстоянии от третьего шкива 43 ближе к первому шкиву 41 и второму шкиву 42. Третий шкив 43 выполнен с возможностью поворота вокруг указанной оси Х поворота между первым положением при повороте, показанным на фиг.2 и 4, и вторым положением при повороте, показанным на фиг.3 и 6, для выравнивания первой части 33 транспортирующей ветви 31 соответственно относительно первого подающего конвейера 21, проходящего в первой плоскости Н1 транспортирования, и относительно второго подающего конвейера 22, проходящего во второй плоскости Н2 транспортирования.
Место Y расположения центра поворота выбрано так, что длина минимальной петли L является одинаковой в первом положении третьего шкива 43 при повороте, которое показано на фиг.2 и 4, и во втором положении третьего шкива 43 при повороте, которое показано на фиг.3 и 6, с учетом допустимого отклонения, составляющего менее 1 процента, предпочтительно менее 0,4 процента, более предпочтительно менее 0,1 процента и наиболее предпочтительно менее 0,05 процента. В альтернативном варианте допустимое отклонение составляет менее полмиллиметра, когда третий шкив 43 находится в первом положении при повороте, показанном на фиг.2 и 4, и во втором положении при повороте, показанном на фиг.3–6. Допустимое отклонение предпочтительно составляет менее одной десятой миллиметра, более предпочтительно менее одной двадцатой миллиметра и наиболее предпочтительно менее одной пятидесятой миллиметра. Место Y расположения центра поворота предпочтительно выбрано так, чтобы длина минимальной петли L была одинаковой с учетом допустимого отклонения для любого положения при повороте третьего шкива 43, например, промежуточного положения при повороте, показанного на фиг.5, вокруг оси Х поворота между первым положением при повороте, показанным на фиг.2 и 4, и вторым положением при повороте, показанным на фиг.3 и 6.
Место Y расположения центра поворота выбрано на основе принципа, заключающегося в том, что длина минимальной петли L остается постоянной при перемещении третьего шкива 43 вдоль эллиптической траектории, которая задана первой фокусной точкой F1, второй фокусной точкой F2 и точкой траектории с кривизной указанной эллиптической траектории. Однако третий шкив 43 перемещается вдоль круговой траектории А, концентрической по отношению к месту Y расположения центра поворота. Вследствие эксцентричности эллиптической траектории такая круговая траектория А может только частично приблизительно соответствовать эллиптической траектории. Однако, если эксцентриситет близок к нулю или если только малая длина дуги круговой траектории А используется для обеспечения приблизительного соответствия эллиптической траектории, то отклонение круговой траектории А относительно эллиптической траектории может быть минимизировано.
Ситуация усложняется вследствие того, что первая фокусная точка F1 и вторая фокусная точка F2, которые определяют эллиптическую траекторию, расположены соответственно на первой окружной периферии 45 и второй окружной периферии 46. Более конкретно, первая фокусная точка F1 расположена в месте, в котором первая часть 33 транспортирующей ветви 31 сходится по касательной или соединяется с первой окружной периферией 45 первого шкива 41, и вторая фокусная точка F2 расположена в месте, в котором первая часть 35 обратной ветви 32 сходится по касательной или соединяется со второй окружной периферией 46 второго шкива 42. Указанные фокусные точки F1, F2 смещаются на соответствующих окружных перифериях 45, 46 при повороте третьего шкива 43 вокруг оси Х поворота, соответствующей месту Y расположения центра поворота. Следовательно, для оптимальной аппроксимации по отношению к эллиптической траектории, по которой должна проходить ось S3 третьего шкива, следует фактически обеспечить приблизительное соответствие средней из нескольких эллиптических траекторий, которые заданы разными фокусными точками F1, F2 в разных положениях третьего шкива 43 при повороте.
Следует отметить, что длина реальных петель бесконечных лент 30 между первым шкивом 41, вторым шкивом 42 и четвертым шкивом 44 остается постоянной. В частности, можно отметить, что вторая часть 34 транспортирующей ветви 31 сходится по касательной с первой окружной периферией 45 первого шкива 41 в первой точке F3 касания, что вторая часть 36 обратной ветви 32 сходится по касательной со второй окружной периферией 46 второго шкива 42 во второй точке F4 касания, и что длина петель бесконечных лент 30 между указанной первой точкой F3 касания и указанной второй точкой F4 касания является постоянной независимо от положения третьего шкива 43 при повороте. Другими словами, длина реальной петли бесконечных лент 30 и/или длина минимальной петли L на участке между первой точкой F3 касания и второй точкой F4 касания, который не проходит вокруг третьего шкива 43, остается постоянной. Место Y расположения центра поворота выбрано так, что длина остальной части петель бесконечных лент 30, которая проходит от первой точки F3 касания на первом шкиве 41 вокруг третьего шкива 43 до второй точки F4 касания на втором шкиве 42, является одинаковой – с учетом допустимого отклонения, составляющего менее 1 процента, – когда третий шкив 43 находится во втором положении при повороте, по отношению к длине такой же части, когда третий шкив 43 находится в первом положении при повороте.
В дальнейшем приведен ряд характеристик места Y расположения центра поворота, которые позволяют оси S3 третьего шкива следовать по круговой траектории А, которая, по меньшей мере, между первым положением при повороте и вторым положением при повороте лучше всего приближается к идеальной и/или средней эллиптической траектории.
Ось S3 третьего шкива находится в первой точке Р1 траектории на круговой траектории А, когда третий шкив 43 находится в первом положении при повороте, показанном на фиг.2 и 4, и ось S3 третьего шкива находится во второй точке Р2 траектории на круговой траектории А, когда третий шкив 43 находится во втором положении при повороте, показанном на фиг.3 и 6. Круговая траектория А между первой точкой Р1 траектории и второй точкой Р2 траектории образует дугу В окружности, вдоль которой перемещается ось S3 третьего шкива при повороте третьего шкива 43 вокруг оси Х поворота из первого положения при повороте во второе положение при повороте. Место Y расположения центра поворота выбрано так, что указанная дуга В окружности приблизительно соответствует идеальной и/или средней эллиптической траектории.
Фиг.4 показывает первую эллиптическую траекторию Е1, которая задана первой фокусной точкой F1, второй фокусной точкой F2 и первой точкой Р1 траектории, когда третий шкив 43 находится в первом положении при повороте. Фиг.6 показывает вторую эллиптическую траекторию Е2, которая задана первой фокусной точкой F1, второй фокусной точкой F2 и второй точкой Р2 траектории, когда третий шкив 43 находится во втором положении при повороте. Указанная вторая эллиптическая траектория Е2 незначительно отличается от первой эллиптической траектории Е1, поскольку ось S3 третьего шкива переместилась вдоль дуги В окружности, а не вдоль первой эллиптической траектории Е1. Фиг.5 показывает промежуточную третью эллиптическую траекторию Е3, которая задана первой фокусной точкой F1, второй фокусной точкой F2 и третьей точкой Р3 траектории, когда третий шкив 43 находится в третьем положении при повороте, которое является промежуточным между первым положением при повороте и вторым положением при повороте. Как и в предыдущем случае, указанная третья эллиптическая траектория Е3 незначительно отличается от первой эллиптической траектории Е1 и второй эллиптической траектории Е2. Место Y расположения центра поворота выбрано так, что дуга В окружности приблизительно соответствует средней из первой эллиптической траектории Е1, второй эллиптической траектории Е2 и/или третьей эллиптической траектории Е3.
Место Y расположения центра поворота также может характеризоваться тем, что в случае, когда первая окружная периферия 45 и вторая окружная периферия 46 соединены посредством наружных касательных Т1, Т2, место Y расположения центра поворота находится в промежуточной зоне, границы которой заданы указанными наружными касательными Т1, Т2. Место Y расположения центра поворота может дополнительно характеризоваться тем, что в случае, когда ось S1 первого шкива и ось S2 второго шкива соединены межцентровой линией T3, место Y расположения центра поворота находится за межцентровой линией T3 по отношению к третьему шкиву 43. В качестве дополнения или альтернативы место Y расположения центра поворота может характеризоваться тем, что в случае, когда этом ось S1 первого шкива и ось S2 второго шкива соединены межцентровой линией T3, место Y расположения центра поворота может быть спроецировано на межцентровую линию T3 в направлении, нормальном к указанной межцентровой линии T3, на половине или приблизительно половине расстояния между осью S1 первого шкива и осью S2 второго шкива.
В примере, показанном на фиг.4, 5 и 6, диаметры первого шкива 41, второго шкива 42, третьего шкива 43 и четвертого шкива 44 составляют соответственно 50 миллиметров, 50 миллиметров, 30 миллиметров и 30 миллиметров. Ось S1 первого шкива и ось S2 второго шкива расположены на расстоянии друг от друга в вертикальном направлении V, составляющем 100 миллиметров. Ось S1 первого шкива расположена по ходу позади оси S2 второго шкива по отношению к направлению D транспортирования на расстоянии от нее, составляющем 20 миллиметров. Ось S1 первого шкива и ось S4 четвертого шкива расположены на расстоянии друг от друга, определяемом в направлении D транспортирования и составляющем 160 миллиметров. Четвертый шкив 44 расположен так, что вторая часть 34 транспортирующей ветви 31 проходит горизонтально. Первая часть 33 транспортирующей ветви 31 имеет угол Z поворота, составляющий 1 градус, относительно проходящей горизонтально, второй части 34 транспортирующей ветви 31, когда третий шкив 43 находится в первом положении при повороте, показанном на фиг.4, и угол, составляющий 21 градус, относительно проходящей горизонтально, второй части 34 транспортирующей ветви 31, когда третий шкив 43 находится во втором положении при повороте, показанном на фиг.6. Место Y расположения центра поворота находится по ходу впереди оси S1 первого шкива по отношению к направлению D транспортирования на расстоянии от нее, определяемом в направлении D транспортирования и составляющем 25,27 миллиметра, и ниже оси S1 первого шкива на расстоянии от нее, определяемом в вертикальном направлении V и составляющем 46,36 миллиметра. Радиус круговой траектории А и, следовательно, дуги В окружности составляет 185,31 миллиметра. При указанных размерах длина реальной петли варьируется между 799,99 миллиметра и 800,01 миллиметра между первым положением при повороте и вторым положением при повороте. Следовательно, когда длина данных одной или более бесконечных петель 30 выбрана равной 800 миллиметрам, длина фактической петли будет иметь допустимое отклонение 0,01 миллиметра между первым положением при повороте и вторым положением при повороте. Кроме того, при указанных размерах длина минимальной петли L варьируется между 588,40 миллиметра и 588,42 миллиметра между первым положением при повороте и вторым положением при повороте. Следовательно, длина минимальной петли L будет иметь допустимое отклонение 0,01 миллиметра по отношению к средней длине минимальной петли L в первом положении при повороте и втором положении при повороте.
Кроме того, на фиг.4, 5 и 6 можно видеть, что угол между первой частью 33 транспортирующей ветви 31 и первой частью 35 обратной ветви 32 является относительно острым, например, составляет менее 90 градусов.
Специалисту в данной области техники будет понятно, что вышеуказанные размеры приведены только в качестве примера для демонстрации принципа работы согласно изобретению. Тот же принцип работы применим также для различных других размеров. Место Y расположения центра поворота может быть определено путем вычислений для каждой конфигурации посредством ввода параметров первого шкива 41, второго шкива 42 и третьего шкива 43 в компьютерную программу, которая может вычислять траекторию перемещения оси S3 третьего шкива 43, не ограниченную местом Y расположения центра поворота, относительно первого шкива 41 и второго шкива 42 при предположении, что длина минимальной петли L сохраняется постоянной. Это приводит к перемещению третьего шкива 43 вдоль идеальной и/или средней эллиптической траектории. При графическом отображении точек траектории вдоль данной идеальной и/или средней эллиптической траектории для трех намеченных положений при повороте можно начертить круговую траекторию А и/или дугу В окружности, «проходящую» через указанные три положения при повороте.
Как показано на фиг.1, поворотный конвейер 3 содержит поворотный рычаг 5 для обеспечения опоры для третьего шкива 43 с возможностью поворота вокруг оси Х поворота. Поворотный конвейер 3 дополнительно содержит привод 6 поворота, который выполнен с возможностью приведения поворотного рычага 5 в поворотное движение W вокруг оси Х поворота для поворота третьего шкива 43 между первым положением при повороте, показанным на фиг.2 и 4, и вторым положением при повороте, показанным на фиг.3 и 6. В данном иллюстративном варианте осуществления привод 6 поворота представляет собой поршень, который контактно взаимодействует с поворотным рычагом 5 в месте, находящемся на расстоянии от оси Х поворота, для поворота указанного поворотного рычага 5 вокруг указанной оси Х поворота. В альтернативном варианте привод 6 поворота может быть выполнен в виде ротационного привода, например, серводвигателя, который контактно взаимодействует с поворотным рычагом 5 непосредственно в месте расположения оси Х поворота.
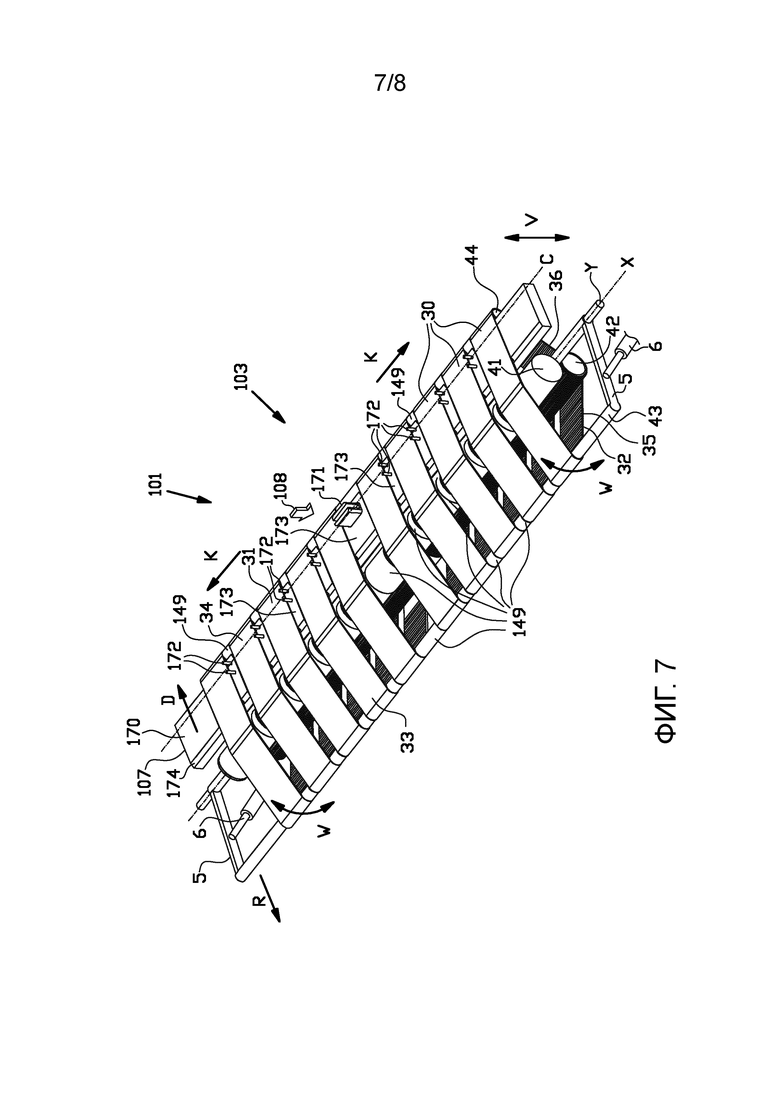
Фиг.7 показывает альтернативное транспортирующее устройство 101 согласно второму иллюстративному варианту осуществления изобретения. Указанное альтернативное транспортирующее устройство 101 отличается от рассмотренного ранее, транспортирующего устройства 1 тем, что его поворотный конвейер 103 содержит резальное устройство 107, которое выполнено с возможностью перемещения из отведенного положения, в котором оно находится в пределах реальных петель соответствующих бесконечных лент, в положение при разрезании, показанное на фиг.7, в котором резальное устройство 107 выступает, по меньшей мере частично, наружу по отношению к реальным петлям и через промежуток между соответствующими бесконечными лентами 30 в зоне транспортирующей ветви 31. Более конкретно, резальное устройство 107 выполнено с возможностью выступания через промежуток между бесконечными лентами 30 в зоне второй части 34 транспортирующей ветви 31, между первым шкивом 41 и четвертым шкивом 44.
В этом иллюстративном варианте осуществления резальное устройство 107 содержит балку 170, которая расположена так, что она проходит с внутренней стороны реальных петель соответствующих бесконечных лент рядом с транспортирующей ветвью 31, и опору 171, которая выполнена с возможностью перемещения относительно указанной балки 170 через промежуток между соответствующими бесконечными лентами 30 в зоне транспортирующей ветви 31 из отведенного положения в положение при разрезании, показанное на фиг.7. В частности, опора 171 выполнена с возможностью перемещения через один из промежутков в центре или рядом с центром поворотного конвейера 103. Опора 171 выполнена с возможностью перемещения в направлении подъема, которое предпочтительно параллельно вертикальному направлению V. Опора 171 используется для взаимодействия с ножом 108. Указанный нож 108 выполнен с возможностью перемещения вдоль линии С разрезания поперек/от края до края поворотного конвейера 103, предпочтительно в боковом направлении К. В этом примере нож 108 выполнен с возможностью врезания в слой 9 шины рядом с опорой 171 и с возможностью последующего перемещения в одном или обоих направлениях вдоль линии С разрезания для отрезки первой части слоя 9 шины. Опора 171 выполнена с возможностью обеспечения опоры для слоя 9 шины и/или подъема слоя 9 шины относительно бесконечных лент 30 по направлению к ножу 108 для создания возможности врезания ножа 108 в слой 9 шины без врезания в бесконечные ленты 30.
Линия С разрезания находится на расстоянии от четвертого шкива 44, определяемом в направлении D транспортирования и предпочтительно составляющем пятьдесят миллиметров или менее и предпочтительно тридцать миллиметров или менее. Следовательно, относительно короткая часть слоя 9 шины может быть отрезана и выгружена в направлении D транспортирования, например, в качестве части, представляющей собой отходы, перед отрезкой последующей части слоя 9 шины. Остальная часть слоя 9 шины может быть отведена в направлении R отвода, противоположном направлению D транспортирования, для избежания ситуации, при которой отрезанная часть снова прикрепляется или приклеивается к остальной части слоя 9 шины.
Резальное устройство 107 дополнительно содержит множество поднимающих элементов 172, которые выполнены с возможностью перемещения относительно указанной балки 170 через промежуток между соответствующими бесконечными лентами 30 в зоне транспортирующей ветви 31 из отведенного положения в положение при разрезании, показанное на фиг.7. Поднимающие элементы 172 могут поднимать слой 9 шины в направлении подъема, предпочтительно параллельном вертикальному направлению V, от бесконечных лент 30 вдоль линии С разрезания, так что нож 108 может быть перемещен вдоль указанной линии С разрезания без врезания в бесконечные ленты 30.
Балка 170 предпочтительно содержит множество опорных элементов 173, которые расположены так, что они находятся на одном уровне или по существу на одном уровне с бесконечными лентами 30 в промежутке между указанными бесконечными лентами 30 в зоне транспортирующей ветви 31. Балка 170 имеет скошенную кромку 174, обращенную в направлении, противоположном направлению D транспортирования, для отклонения слоя 9 шины над балкой 170 в указанном направлении D транспортирования.
Как показано на фиг.7, один или более из шкивов 41–44 предусмотрены с множеством проходящих в направлении вдоль окружности, направляющих элементов 149 в промежутке между соответствующими бесконечными лентами 30 для направления соответствующих бесконечных лент 30. Указанные направляющие элементы 149 расположены так, что они находятся на одном уровне или по существу на одном уровне с бесконечными лентами 30 в промежутке между указанными бесконечными лентами 30 в зоне транспортирующей ветви 31 для обеспечения опоры для слоя 9 шины и для направления и/или удерживания бесконечных лент 30 в заданном положении.
Следует дополнительно отметить, что данные одна или более бесконечных лент 30 выполнены с возможностью легкого снятия со шкивов 41–44 в боковом направлении К, параллельном оси Х поворота.
Следует понимать, что вышеприведенное описание включено для иллюстрации функционирования предпочтительных вариантов осуществления и не предназначено для ограничения объема изобретения. Для специалиста в данной области техники из вышеприведенного рассмотрения будут очевидными многие варианты, которые, тем не менее, будут охватываться объемом настоящего изобретения.
Например, специалисту будет понятно, что поворотный конвейер согласно изобретению может быть использован в сочетании с другим количеством подающих конвейеров и/или разгрузочных конвейеров. Направление транспортирования может быть противоположным направлению транспортирования, показанному на фиг.1–7, при этом в данном случае поворотный конвейер будет принимать слои шины от одного подающего конвейера 23 и выгружать указанные слои шины избирательно на один из разгрузочных конвейеров 21, 22.
Изобретение относится к транспортирующему устройству и способу транспортирования слоя шины. Транспортирующее устройство содержит поворотный конвейер (3) с, по меньшей мере, одной бесконечной лентой (30) или проволочной сеткой и первым шкивом (41), вторым шкивом (42) и третьим шкивом (43), которые определяют границы минимальной петли (L) для направления указанной бесконечной ленты или проволочной сетки вдоль транспортирующей ветви (31) и обратной ветви (32), при этом третий шкив (43) расположен между транспортирующей ветвью (31) и обратной ветвью (32), при этом третий шкив выполнен с возможностью поворота вокруг оси (Х) поворота между первым положением при повороте и вторым положением при повороте, при этом минимальная петля имеет некоторую длину, при этом место расположения центра поворота выбрано так, чтобы длина минимальной петли в случае, когда третий шкив находится в первом положении при повороте, была такой же, как длина минимальной петли в случае, когда третий шкив находится во втором положении при повороте, с допустимым отклонением, составляющим менее 1 процента по отношению к длине минимальной петли в случае, когда третий шкив находится во втором положении при повороте. Технический результат изобретения - уменьшение или предотвращение деформации слоя шины. 2 н. и 37 з.п. ф-лы, 8 ил.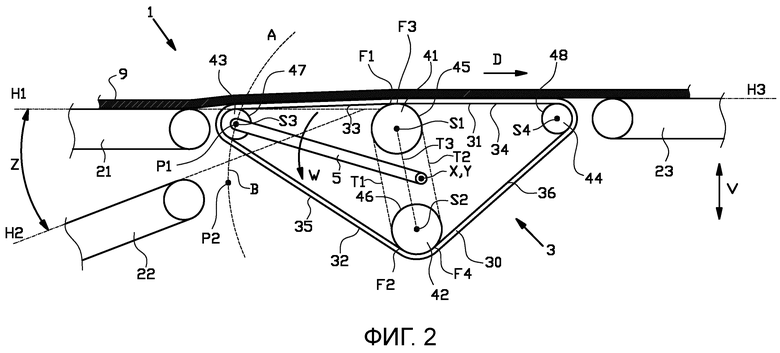
1. Транспортирующее устройство (1, 101, 201) для транспортирования слоя (9) шины, при этом транспортирующее устройство (1, 101, 201) содержит поворотный конвейер (3, 103, 203) с, по меньшей мере, одной бесконечной лентой (30, 230) или проволочной сеткой и первым шкивом (41), вторым шкивом (42) и третьим шкивом (43), которые определяют границы минимальной петли (L) для направления указанной, по меньшей мере, одной бесконечной ленты (30, 230) или проволочной сетки вдоль транспортирующей ветви (31) и обратной ветви (32), причем первый шкив (41) определяет границу, по меньшей мере, первой части (33) транспортирующей ветви (31), второй шкив (42) определяет границу, по меньшей мере, первой части (35) обратной ветви (32), а третий шкив (43) расположен между первой частью (33) транспортирующей ветви (31) и первой частью (35) обратной ветви (32), при этом третий шкив (43) выполнен с возможностью поворота относительно первого шкива (41) и второго шкива (42) вокруг оси (Х) поворота, которая расположена в месте (Y) расположения центра поворота, находящемся на расстоянии от третьего шкива (43) ближе к первому шкиву (41) и второму шкиву (42), причем третий шкив (43) выполнен с возможностью поворота вокруг указанной оси (Х) поворота между первым положением при повороте и вторым положением при повороте для выравнивания первой части (33) транспортирующей ветви (31) относительно соответственно первой плоскости (Н1) транспортирования и второй плоскости (Н2) транспортирования, при этом минимальная петля (L) имеет некоторую длину, причем место (Y) расположения центра поворота выбрано так, чтобы длина минимальной петли (L) в случае, когда третий шкив (43) находится в первом положении при повороте, была такой же с учетом допустимого отклонения, составляющего менее 1 процента по отношению к длине минимальной петли (L) в случае, когда третий шкив (43) находится во втором положении при повороте.
2. Транспортирующее устройство (1, 101, 201) по п.1, в котором допустимое отклонение составляет менее 0,4 процента, менее 0,1 процента или менее 0,05 процента.
3. Транспортирующее устройство (1, 101, 201) по п.1, в котором допустимое отклонение составляет менее полмиллиметра, менее одной десятой миллиметра, менее одной двадцатой миллиметра или менее одной пятидесятой миллиметра.
4. Транспортирующее устройство (1, 101, 201) по п.1, в котором место (Y) расположения центра поворота выбрано так, что длина минимальной петли (L) является одинаковой с учетом допустимого отклонения при любом положении третьего шкива (43) при повороте вокруг оси (Х) поворота между первым положением при повороте и вторым положением при повороте.
5. Транспортирующее устройство (1, 101, 201) по п.1, в котором первый шкив (41) и второй шкив (42) имеют соответственно первую окружную периферию (45) и вторую окружную периферию (46), при этом первая окружная периферия (45) и вторая окружная периферия (46) выполнены с возможностью соединения посредством двух наружных касательных (Т1, Т2), которые определяют границы промежуточной зоны между первым шкивом (41) и вторым шкивом (42), причем место (Y) расположения центра поворота находится внутри данной промежуточной зоны.
6. Транспортирующее устройство (1, 101, 201) по п.1, в котором третий шкив (43) имеет ось (S3) третьего шкива, которая выполнена с возможностью перемещения вдоль круговой траектории (А), которая является концентрической по отношению к месту (Y) расположения центра поворота, при этом ось (S3) третьего шкива находится в первой точке (Р1) траектории и во второй точке (Р2) траектории на круговой траектории (А), когда третий шкив (43) находится соответственно в первом положении при повороте и втором положении при повороте, причем первый шкив (41) и второй шкив (42) имеют соответственно первую окружную периферию (45) и вторую окружную периферию (45), при этом круговая траектория (А) между первой точкой (Р1) траектории и второй точкой (Р2) траектории образует дугу (В) окружности, приблизительно соответствующую первой эллиптической траектории (Е1), которая задана первой фокусной точкой (F1), расположенной на или в пределах первой окружной периферии (45), второй фокусной точкой (F2), расположенной на или в пределах второй окружной периферии (46), и первой точкой (Р1) траектории.
7. Транспортирующее устройство (1, 101, 201) по п.6, в котором дуга (В) окружности приблизительно соответствует средней из первой эллиптической траектории (Е1) и второй эллиптической траектории (Е2), которая задана первой фокусной точкой (F1), второй фокусной точкой (F2) и второй точкой (Р2) траектории.
8. Транспортирующее устройство (1, 101, 201) по п.6, в котором первая часть (33) транспортирующей ветви (31) проходит между первым шкивом (41) и третьим шкивом (42) и сходится по касательной с первой окружной периферией (45) в первой фокусной точке (F1), причем первая часть (35) обратной ветви (32) проходит между вторым шкивом (42) и третьим шкивом (43) и сходится по касательной со второй окружной периферией (46) во второй фокусной точке (F2), при этом первая фокусная точка (F1) и вторая фокусная точка (F2) смещаются соответственно вдоль первой окружной периферии (45) и второй окружной периферии (46) при повороте третьего шкива (43) между первым положением при повороте и вторым положением при повороте.
9. Транспортирующее устройство (1, 101, 201) по п.1, в котором первый шкив (41) и второй шкив (42) имеют соответственно ось (S1) первого шкива и ось (S2) второго шкива, причем ось (S1) первого шкива и ось (S2) второго шкива выполнены с возможностью соединения межцентровой линией (T3), при этом место (Y) расположения центра поворота находится с противоположной стороны межцентровой линии (T3) по отношению к третьему шкиву (43).
10. Транспортирующее устройство (1, 101, 201) по п.1, в котором первый шкив (41) и второй шкив (42) имеют соответственно ось (S1) первого шкива и ось (S2) второго шкива, причем ось (S1) первого шкива и ось (S2) второго шкива выполнены с возможностью соединения межцентровой линией (T3), при этом место (Y) расположения центра поворота может быть спроецировано на межцентровую линию (T3) в направлении, нормальном к межцентровой линии (T3), на половине или приблизительно половине расстояния между осью (S1) первого шкива и осью (S2) второго шкива.
11. Транспортирующее устройство (1, 101, 201) по п.1, в котором первое положение при повороте и второе положение при повороте смещены относительно друг друга вокруг оси (Х) поворота на угол (Z) поворота, составляющий менее сорока градусов, менее тридцати градусов или менее двадцати пяти градусов.
12. Транспортирующее устройство (1, 101, 201) по п.11, в котором первое положение при повороте и второе положение при повороте смещены относительно друг друга вокруг места (Y) расположения центра поворота на угол (Z) поворота, составляющий, по меньшей мере, десять градусов, по меньшей мере, пятнадцать градусов или, по меньшей мере, двадцать градусов.
13. Транспортирующее устройство (1, 101, 201) по п.1, в котором поворотный конвейер (3, 103, 203) содержит поворотный рычаг (5) для обеспечения опоры для третьего шкива (43) с возможностью поворота вокруг оси (Х) поворота.
14. Транспортирующее устройство (1, 101, 201) по п.13, в котором поворотный конвейер (3, 103, 203) содержит привод (6) поворота, который выполнен с возможностью приведения поворотного рычага (5) в поворотное движение вокруг оси (Х) поворота для поворота третьего шкива (43) между первым положением при повороте и вторым положением при повороте.
15. Транспортирующее устройство (1, 101, 201) по п.1, в котором, по меньшей мере, один из множества шкивов (41-43) представляет собой приводной шкив (42) для приведения в движение указанной, по меньшей мере, одной бесконечной ленты (30, 230) или проволочной сетки.
16. Транспортирующее устройство (1, 101, 201) по п.15, в котором указанная, по меньшей мере, одна бесконечная лента (30, 230) представляет собой зубчатую ленту, а указанный, по меньшей мере, один приводной шкив (42) представляет собой зубчатый приводной шкив, который выполнен с возможностью контактного взаимодействия с зубчатой лентой для приведения указанной зубчатой ленты в движение.
17. Транспортирующее устройство (1, 101, 201) по п.15, в котором второй шкив (42) представляет собой приводной шкив.
18. Транспортирующее устройство (1, 101, 201) по п.1, в котором транспортирующая ветвь (31) указанной, по меньшей мере, одной бесконечной ленты или проволочной сетки выполнена с возможностью приведения ее в движение в направлении (D) транспортирования, при этом третий шкив (43) представляет собой задний шкив по отношению к направлению (D) транспортирования.
19. Транспортирующее устройство (1, 101) по п.18, в котором поворотный конвейер (3, 103) содержит четвертый шкив (44) со стороны первого шкива (41) и второго шкива (42), противоположной по отношению к третьему шкиву (43), причем четвертый шкив (44) выполнен с возможностью образования - вместе с первым шкивом (41), - по меньшей мере, второй части (34) транспортирующей ветви (31) по ходу впереди первой части (33) транспортирующей ветви (31) в направлении (D) транспортирования.
20. Транспортирующее устройство (1, 101) по п.19, в котором четвертый шкив (44) представляет собой передний шкив относительно направления (D) транспортирования.
21. Транспортирующее устройство (1, 101, 201) по п.1, в котором поворотный конвейер (3, 103, 203) содержит множество бесконечных лент (30, 230) или проволочных сеток, при этом каждая бесконечная лента (30, 230) или проволочная сетка проходит в виде реальной петли вокруг множества шкивов (41-44), причем транспортирующие ветви (31) соответствующих бесконечных лент (30, 230) или проволочных сеток выполнены с возможностью приведения их в движение в направлении (D) транспортирования, при этом бесконечные ленты (30, 230) или проволочные сетки расположены рядом друг с другом в боковом направлении (К), перпендикулярном направлению (D) транспортирования.
22. Транспортирующее устройство (1, 101, 201) по п.21, в котором бесконечные ленты (30, 230) или проволочные сетки расположены на расстоянии друг от друга в боковом направлении (К).
23. Транспортирующее устройство (101) по п.22, в котором поворотный конвейер (103) содержит резальное устройство (107), которое выполнено с возможностью перемещения из отведенного положения, в котором оно находится в пределах реальных петель соответствующих бесконечных лент (30) или проволочных сеток, в положение при разрезании, в котором резальное устройство (107) выступает, по меньшей мере частично, наружу по отношению к реальным петлям и через промежуток между соответствующими бесконечными лентами (30) или проволочными сетками в зоне транспортирующей ветви (31).
24. Транспортирующее устройство (101) по п.23, в котором поворотный конвейер (3, 103) содержит четвертый шкив (44) со стороны первого шкива (41) и второго шкива (42), противоположной по отношению к третьему шкиву (43), причем четвертый шкив (44) выполнен с возможностью образования - вместе с первым шкивом (41), - по меньшей мере, второй части (34) транспортирующей ветви (31) по ходу впереди первой части (33) транспортирующей ветви (31) в направлении (D) транспортирования, при этом резальное устройство (107) выполнено с возможностью выступания, по меньшей мере частично, наружу по отношению к реальным петлям и через промежуток между соответствующими бесконечными лентами (30) или проволочными сетками в зоне второй части (34) транспортирующей ветви (31).
25. Транспортирующее устройство (101) по п.23, в котором резальное устройство (107) содержит балку (170), которая расположена так, что она проходит с внутренней стороны реальных петель соответствующих бесконечных лент (30) или проволочных сеток рядом с транспортирующей ветвью (31), и опору (171), которая выполнена с возможностью перемещения относительно указанной балки (170) через промежуток между соответствующими бесконечными лентами (30) или проволочными сетками в зоне транспортирующей ветви (31) из отведенного положения в положение при разрезании.
26. Транспортирующее устройство (101) по п.25, в котором резальное устройство (107) содержит множество поднимающих элементов (172), которые выполнены с возможностью перемещения относительно балки через промежуток между соответствующими бесконечными лентами (30) или проволочными сетками в зоне транспортирующей ветви из отведенного положения в положение при разрезании.
27. Транспортирующее устройство (101) по п.25, в котором балка (170) содержит множество опорных элементов (173), которые расположены так, что они находятся на одном уровне с бесконечными лентами (30) или проволочными сетками в промежутке между бесконечными лентами (30) или проволочными сетками в зоне транспортирующей ветви (31) для обеспечения опоры для слоя (9) шины.
28. Транспортирующее устройство (101) по п.25, в котором балка (170) имеет скошенную кромку (174), обращенную в направлении, противоположном направлению (D) транспортирования, для отклонения слоя (9) шины над балкой (170) в направлении (D) транспортирования.
29. Транспортирующее устройство (101) по п.25, в котором балка (170) проходит вдоль линии (С) разрезания для взаимодействия с ножом (108) вдоль линии (С) разрезания, причем линия (С) разрезания находится на расстоянии от четвертого шкива (44), составляющем пятьдесят миллиметров или менее или тридцать миллиметров или менее.
30. Транспортирующее устройство (101) по п.22, в котором первый шкив (41), второй шкив (42) или третий шкив (43) предусмотрены с множеством проходящих в направлении вдоль окружности направляющих элементов (149) в промежутке между соответствующими бесконечными лентами (30) или проволочными сетками для направления соответствующих бесконечных лент (30) или проволочных сеток.
31. Транспортирующее устройство (101) по п.30, в котором направляющие элементы (149) расположены так, что они находятся на одном уровне с бесконечными лентами (30) или проволочными сетками в промежутке между бесконечными лентами (30) или проволочными сетками в зоне транспортирующей ветви (31) для обеспечения опоры для слоя (9) шины.
32. Транспортирующее устройство (1) по п.1, дополнительно содержащее первый подающий конвейер (21) и второй подающий конвейер (22), проходящие соответственно в первой плоскости (Н1) транспортирования и второй плоскости (Н2) транспортирования по ходу позади поворотного конвейера (3), и разгрузочный конвейер (23), проходящий в третьей плоскости (Н3) транспортирования по ходу впереди поворотного конвейера (3) в направлении (D) транспортирования, причем поворотный конвейер (3) выполнен с возможностью транспортирования первого слоя (9) шины от первого подающего конвейера (21) к разгрузочному конвейеру (23), когда первая часть (33) транспортирующей ветви (31) выровнена относительно первой плоскости (Н1) транспортирования, и с возможностью транспортирования второго слоя (9) шины от второго подающего конвейера (22) к разгрузочному конвейеру (23), когда первая часть (33) транспортирующей ветви (31) выровнена относительно второй плоскости (Н2) транспортирования.
33. Транспортирующее устройство (1) по п.32, в котором первая плоскость (Н1) транспортирования и третья плоскость (Н3) транспортирования являются параллельными или отклоняются друг от друга не более чем на два градуса.
34. Транспортирующее устройство (1) по п.32, в котором вторая плоскость (Н2) транспортирования смещена на угол (Z) поворота, составляющий менее сорока градусов, менее тридцати градусов или менее двадцати пяти градусов относительно первой плоскости (Н1) транспортирования.
35. Способ транспортирования слоя (9) шины посредством использования транспортирующего устройства (1, 101, 201) по п.1, при этом способ включает этап поворота третьего шкива (43) относительно первого шкива (41) и второго шкива (42) вокруг оси (Х) поворота между первым положением при повороте и вторым положением при повороте при сохранении одинаковой длины минимальной петли (L) с учетом допустимого отклонения, когда третий шкив (43) находится в первом положении при повороте и во втором положении при повороте.
36. Способ по п.35, при котором длина минимальной петли (L) сохраняется одинаковой с учетом допустимого отклонения для любого положения при повороте третьего шкива (43) вокруг оси (Х) поворота между первым положением при повороте и вторым положением при повороте.
37. Способ по п.35, при котором транспортирующее устройство (1) дополнительно содержит первый подающий конвейер (21) и второй подающий конвейер (22), проходящие соответственно в первой плоскости (Н1) транспортирования и второй плоскости (Н2) транспортирования по ходу позади поворотного конвейера (3), и разгрузочный конвейер (23), проходящий в третьей плоскости (Н3) транспортирования по ходу впереди поворотного конвейера (3) в направлении (D) транспортирования, причем способ дополнительно включает этап использования поворотного конвейера (3) для транспортирования первого слоя (9) шины от первого подающего конвейера (21) к разгрузочному конвейеру (23), когда первая часть (33) транспортирующей ветви (31) выровнена относительно первой плоскости (Н1) транспортирования, и для транспортирования второго слоя (9) шины от второго подающего конвейера (22) к разгрузочному конвейеру (23), когда первая часть (33) транспортирующей ветви (31) выровнена относительно второй плоскости (Н2) транспортирования.
38. Способ по п.37, дополнительно включающий этапы отрезки части первого слоя (9) шины или второго слоя (9) шины в зоне транспортирующей ветви (31) поворотного конвейера (3), выгрузки отрезанной части на разгрузочный конвейер (23) и отвода остальной части первого слоя (9) шины или второго слоя (9) шины в направлении (R) отвода, противоположном направлению (D) транспортирования.
39. Способ по п.35, дополнительно включающий этап замены указанной, по меньшей мере, одной бесконечной ленты (30, 230) или проволочной сетки во время технического обслуживания и текущего ремонта, при этом указанная, по меньшей мере, одна бесконечная лента (30, 230) или проволочная сетка выполнена с возможностью снятия с первого шкива (41), второго шкива (42) и третьего шкива (43) в боковом направлении (К), параллельном оси (Х) поворота.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ МНОГОСЛОЙНОГО КОМПОНЕНТА ШИНЫ | 2008 |
|
RU2455166C1 |
| Машина для резки и укладки резиновых передов | 1928 |
|
SU15713A1 |
| Устройство для изготовления обрезиненного металлокордного полотна | 1989 |
|
SU1694415A1 |
| DE 102007025384 B3, 20.11.2008 | |||
| УСТРОЙСТВО ДЛЯ ЛЕЧЕНИЯ ПЕРЕЛОМОВ ТАЗА | 2002 |
|
RU2230515C2 |
| DE 3733318 A1, 27.04.1989. | |||

