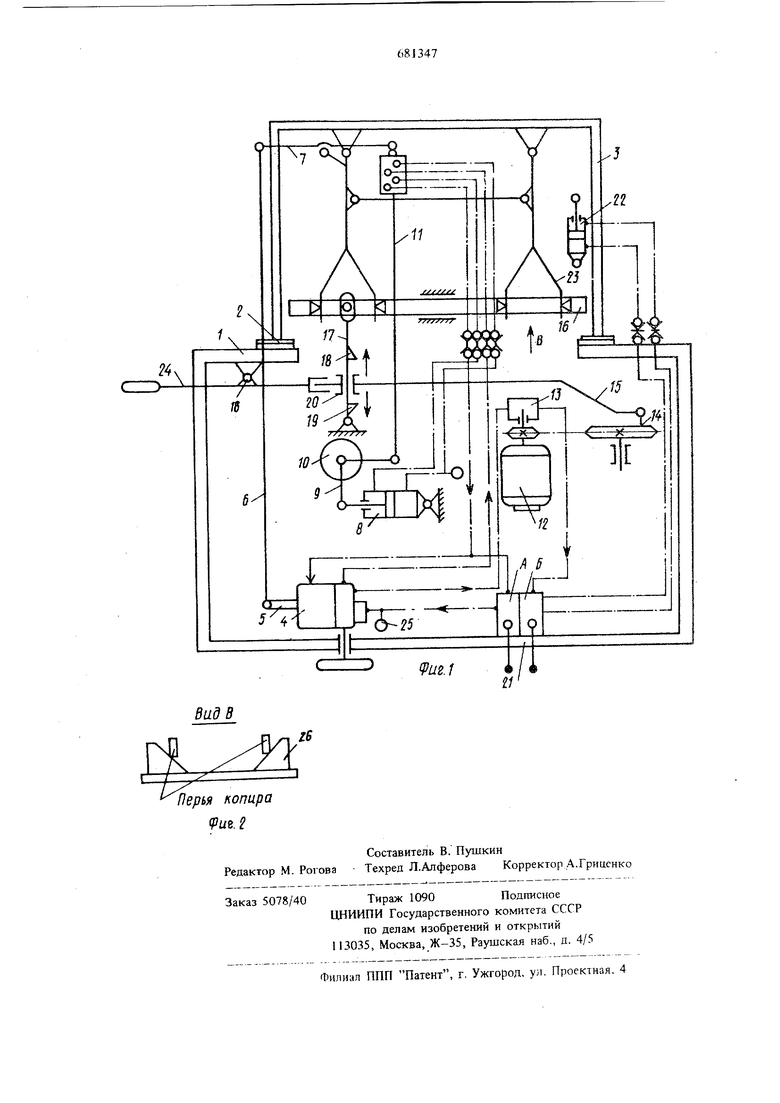
автомата 3, силовой гидроцилиидр 8, соединенный с двуплечим рычагом 9, на оси которого установлено нагрузочное устройство 10, и далее посредством тяги 11 - с распределителем автомата 3, электродвигатель 12, являющийся приводом гидронасоса 13 и кривошипного механизма 14, кинематически связанного тягой 15 с подвижной рейкой 16 посредством рычага 17 диапазонов с упорами 18, 19 и ползуном 20 распределительное устройство 21, гидравлически соединяющее насос 13 посредством секции А с гидроусилителем 4 рулевого механизма, а посредством секции Б - с гидроцилиндром 22 подъема копиров 23 испытуемого автомата 3. Ползун 20 соединен с рукояткой 24 переключения. Давление в системе измеряется манометром 25. На рейке 16 установлены упоры 26, имеющие наклонные плоскости дпя контакта с перьями копиров 23. Стевд работает следующим образом. Рама испытуемого автомата 3 закрепляется на привалочных площадках 2 рамы 1 стенда. Затем посредством тяг 6 и 11 стыкуется кинем тика, а посредством гибких рукавов (на чертежах не показаны) - гидравлические магистрали стенда и испытуемого автомата 3. Секцией Б распределителя 21 копиры 23 посредством гидроцилиндра 22 устанавливаются на наклонных поверхностях упоров 26 рейки 16, при этом по положению перьев копиров 23 на наклонных поверхностях упоров 26 судят о качестве сборки копиров (плоскостность перьев симметричность раствора и т.д.). Затем секцией А распределительного устройства 21 включается гидросистема следящего механизма автомата 3. Кривошипный механизм 14 приводит в движение рейку 16, а с ней перемещает копиры 23, находящиеся между упорами 26, с амплитудой, определяемой положением рукоятки 24 переключения и соответственно ползуна 20 на рычаге 17 диапазонов. Оптимальные положения ползуна 20 рычага 17 диапазонов определены заранее и соответствуют реально существующему на копирах входному сигналу от ряда убираемой сельскохозяйственной культуры. Вначале рукояткой 24 переключения ползун 20 переводится до упора 18, соответствующего минимальному входному сигналу на копирах 23, по отработке которого силовым гидроцилиндром 8 с помощью известных средств судят о качестве сборки механической части испытуемого автомата 3 вождения. Особенно важна оценка качества сборки шарнирных соединений являющихся основным источником люфтов в следящей системе. После этого рукояткой 24 переключения пол зун 20 переводится до упора 19 на рычаге 17 диапазонов, соответствующего максимальному входному сигналу на копирах 23. В этом положении производится обкатка механической и гидравлической частей автомата вождения с визуальной оценкой работы всех элементов системы. Далее испытанию подвергается система ввода корректирующего сигнала при имитации режима автоматического управления поворотом рулевого колеса гидроусилителя 4 рулевого механизма. Подается сигнал на суммирующий рычаг 7, кинематически связанный с гидрораспределителем следящей системы испытуемого автомата 3. При этом по обработке корректирующего сигнала (известными средствами) силовым гидроцилиндром 8 оцегшвается зона нечувствительности, приведенная к рулевому колесу. Свободный ход рулевого колеса механизма рулевого управления оценивается аналогично описанному. При этом испытуемый автомат 3 переводится секцией Б распределительного устройства 21 в режим ручного управления. Оценка качества работы пвдросистемы производится по манометрам 25, установленным в необхода1мых магистралях. Таким образом, на предлагаемом стенде проводится проверка механической и гидравлической частей автомата вождения, его обкатка в условиях, близких к реальным, и на основании сравнения полученных параметров с оптимальны.1И дается качественная оценка работоспособности испытуемого автомата. Формула изобретения Стевд для испытания автоматов вождения сельскохозяйственных машин, включающий раму, установленные на ней электродвигатель, гидронасос и распределительное устройство, кинематически связанное с кривошипным механизмом, и рукоятку включения, отличающийся тем, что, с целью расширения его функциональных возможностей, гидрораспределитель соединен с кривошипным механизмом посредством рычага диапазонов и подвижной в поперечном направлении рейкой, которая снабжена фиксаторами дпя каждого копирующего щупа автомата вождения, а рычаг диапазонов щарнирно соединен с рейкой и снабжен упорами, между которыми установлен ползун. Связанный с рукояткой включе1шя и кривопшпным механизмом. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 516935, кл. G 01 М 19/00, 1974. 2.Отчет по теме Иа-67. Исследова1ше и разработка автоматического приспособления для межкустовой обработки почвы в виноградниках. 1970, с. 110, рис. 4.7.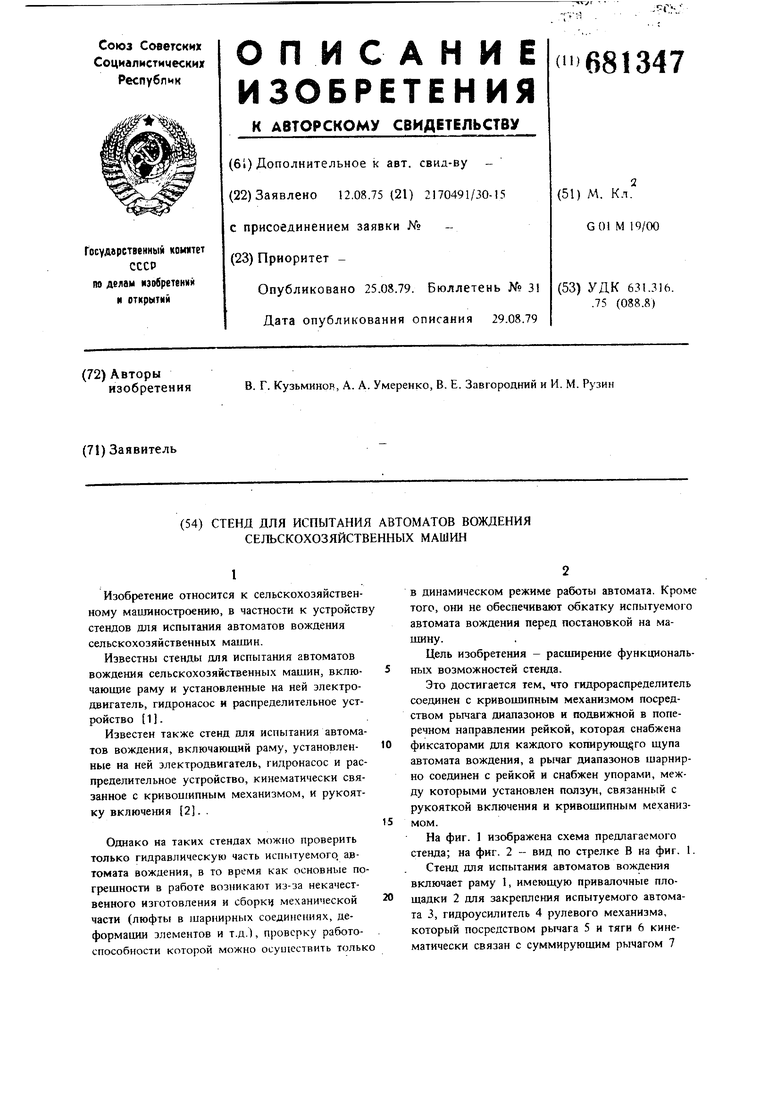
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания автоматов вождения сельскохозяйственных машин | 1973 |
|
SU516935A1 |
| Устройство для обработки корпуса судна в доке | 1983 |
|
SU1085892A1 |
| Стенд для испытания рулевого управления автомобиля | 1981 |
|
SU1026033A1 |
| Устройство для управления самоходной сельскохозяйственной машиной | 1982 |
|
SU1113011A1 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 2008 |
|
RU2385249C1 |
| СПОСОБ РАБОТЫ ПОГРУЗЧИКА-ОЧИСТИТЕЛЯ КОРНЕПЛОДОВ И АГРЕГАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2471334C1 |
| Устройство для автоматического вождения самоходной сельскохозяйственной машины | 1981 |
|
SU952122A1 |
| Устройство для управления самоходнойСЕльСКОХОзяйСТВЕННОй МАшиНОй | 1979 |
|
SU852207A1 |
| Рулевое управление трактора | 1984 |
|
SU1221002A1 |
| Копирующее устройство для автоматического вождения сельскохозяйственной машины по борозде | 1981 |
|
SU959649A1 |