1
Устройство относится к сельскохозяйственному машиностроению, в частности к агрегатам для управления сельскохозяйственными машинами при уборке сахарной свеклы.Известно устройство для управления самоходной сельскохозяйственной машиной, содержащее следяш,ую систему автоматического вождения с механическими обратными связями 1.
Известно также устройство для управления самоходной сельскохозяйственной машиной, содержащее следящую систему с копирующими щупами, гидрораспределитель, гидроцилиндр управляемых колес, корректирующий гидроцилиндр, узел дистанционного управления, питаемый рабочей жидкостью, последовательно с гидро-. распределителем, и систему клапанов 2.
Недостатком известных устройств является то, что для обеспечения обратной связи в следящих системах гидроцилиндр управляемых колес должен быть кинематически связан с гидрораспределителем при помощи тяг и рычагов с шарнирами. Вместе с тем, при большом удалении копирующих щупов и управляемых колес или при занятости пространства между ними другими конструктивными элементами машины выполнить механические обратные связи без люфтов или других нелинейностей невозмбжно. Эти нелинейности в цепи обратной связи приводят к автоколебаниям, что ухудшает качество управления машиной.
Целью изобретения является улучшение качества управления при любом взаимном расположении копирующих щупов и управляемых колес путем исключения механических обратных связей.
Это достигается тем, что копирующие щупы кинематически связаны с гидравлически управляемым тормозным звеном че15 рез жестко соединенные гидрораспределитель и корректирующий гидроцилиндр, под- ключенный последовательно с гидроцилиндром управляемых колес к гидрораспределителю и дополнительно к узлу дистанционного управления посредством системы клапанов и клапана с логической функцией И.
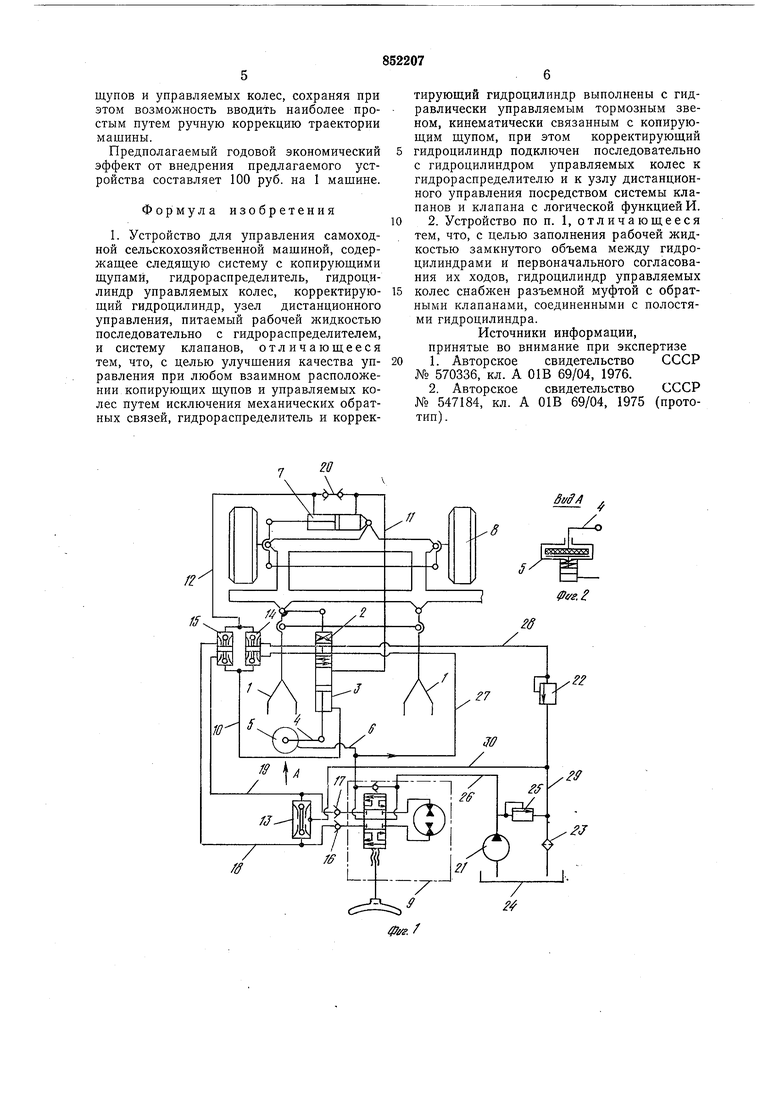
Кроме того, с целью заполнения рабочей жидкостью замкнутого объема между гид25 роцилиндрами и первоначального согласования их ходов полости гидроцилиндра управляемых колес соединены разъемной муфтой с обратным клапаном. На фиг. 1 представлена схема устрой30 ства для управления самоходной сельскохозяйственной машиной; на фиг. 2 - вид А на фиг. 1. Следящая система устройства состоит из датчиков, выполненных в виде копирующих щупов 1, кинематически связанных с золотником гидрораспределителя 2. Корпус гидрораспределителя жестко соединен с корпусом корректирующего гидроцилиндра 3. Шток этого гидроцилиндра щарнирно связан с рычагом 4 тормозного звена 5, управляемого гидравлически через маслопровод 6, подключенный к напорной полости гндрораспределителя 2. Корректирующий гидроцилнндр 3 последовательно с гидроцилиндром 7 управляемых колес 8 подключей к гидрораспределителю 2 и узлу 9 дистанционного управления посредством маслопроводов 10-12 через систему клапанов и клапан 13 с логической функцией И. Система клапанов выполнена в виде двух параллельно соединенных гидрозамков 14 и 15 и двух обратных клапанов 16 и 17, установленных в маслопроводах 18 и 19. Полости гидроцилиндра 7 могут быть сообщены между собой или разобщены при помощи разъемной муфты 20 с обратными клапанами. Резьбовая пара (не показана) разъемной муфты 20 позволяет производить коммутацию маслопроводов без разгерметизации. В схему устройства также входят насое 21, редукционный клапан 22, фильтр 23, маслобак 24 и предохранительный клапан 25. Питание маслом узла дистанционного управления и гидрораспределителя 2 осуществляется последовательно через маслопроводы 26 и 27, а слив - по маслопроводам 28 и 29. Выходная полость клапана с логической функцией И соединена непосредственно с маслобаком 24 через маслонровод 30. Устройство работает следующим обраПри автоматическом унравлении отклонение копирующих щупов I приводит к смещению золотника гидрораспределителя 2 Относительно его корпуса. При этом масло под давлением, создаваемым насосом 21, через гидрозамок 14, маслопроводы 10, 12 попадает в щтоковую полость гидроцилиндров 3 или 7, бесщтоковые полости которых соединены гидравлически, вызывает поворот управляемых колес 8 в соответствующую сторону. Пропорциональность углов поворота управляемых колес и копирующих щупов осуществляется одновременным перемещением поршня гидроцилиндра 7 и гильзы корректирующего гидроцилиндра 3 с жестко связанным с ним корпусом гидрораспределителя 2. Поршень корректирующего гидроцилиндра 3 опирается на рычаг 4 тормозного звена 5, неподвижность которого обеспечивается за счет нарастания давления масла в маслопроводе 6. Автоматический поворот управляемых колес изменяет траекторию двилсения машины и ликвидирует рассогласование на копирующих щупах. Если необходимо произвести ручную корректировку направления движения, например при просевах, оператор поворачивает рулевое колесо узла 9 дистанционного управления в нулшую сторону. При этом масло от насоса 21 по маслопроводу 26, например, через обратный клапан 16 маслопровод 18, гидрозамок 15 направляется в штоковую полость гидроцилиндра 7, поршень которого, перемещаясь, поворачивает управляемые колеса 8. Одновременно масло из бесштоковой полости вытесняется по маслопроводу 11, перемещает поршень корректирующего гпдроцилиндра 3 и рычаг 4 тормозного звена 5. При этом давление масла в управляющем маслопроводе 6 отсутствует. Масло, вытесняемое из штоковой полости гидроцилиндра 3 через маслопроводы 10, 19, гидрозамок 15, открытый канал клапана 13 с логической функцией И, сливные маслопроводы 29, 30, фильтр 23 сливаются в маслобак 24. Приоритет управляющего сигнала от узла 9 дистанционного управления в данном режиме обеспечивается отсутствием, в момент поворота рулевого колеса подачи масла по маслопроводу 27 в распределитель 2. Управление машиной в транспортном режиме происходит аналогичным образом. Надежная работа устройства автоматического вождения обеспечивается при полном согласовании ходов штоков гидроцилиндров 3 и 7 и отсутствии воздуха в замкнутом объеме масла. Первоначальное согласование ходов и удаление воздуха производится с помощью разъемной муфты 20. Для этого поворотом рулевого колеса узла 9 дистанционного управления поршень гидроцилиндра 7 устанавливается в крайнее положение (что соответствует полному повороту управляемых колес вправо). При этом замыканием половинок разъемной муфты 20 соединяются маслопроводы 12, 11, и масло под давлением направляется в бесштоковую полость корректирующего гидроцилиндра 3 и устанавливает его поршень также в крайнее положение. Удаление воздуха из замкнутого объема масла гидроцилиндров 3 и 7 производится путем частичной разгерметизации в одном из соединений маслопровода 11 в момент полного согласования ходов их штоков. Таким образом, схема предлагаемого устройства для управления самоходной машиной обеспечивает высокое качество автоматического управления и позволяет осуществлять любое расположение копирующих
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения самоходной сельскохозяйственной машины | 1981 |
|
SU952122A1 |
| Устройство управления самоходной сельскохозяйственной машиной | 1989 |
|
SU1676474A1 |
| Устройство управления самоходной сельскохозяйственной машиной | 1985 |
|
SU1287763A1 |
| Гидросистема свеклоуборочного комбайна | 1976 |
|
SU655351A2 |
| Устройство управления самоходной сельскохозяйственной машиной | 1989 |
|
SU1635918A1 |
| Устройство для управления самоходной сельскохозяйственной машиной | 1977 |
|
SU631101A1 |
| Устройство для управления самоходной сельскохозяйственной машиной | 1977 |
|
SU677699A1 |
| Устройство для управления самоходной сельскохозяйственной машиной | 1982 |
|
SU1113011A1 |
| Устройство для управления самоходной уборочной машиной | 1979 |
|
SU879060A1 |
| Гидравлическая система к погрузчикуКОРНЕплОдОВ | 1979 |
|
SU803890A1 |
