Изобретение относится к электротехнике и может быть использовано в устройствах для автоматического управления электроприводами, в частности электроприводами с асинхронными двигателями и статическими преобразователями частоты в режиме генераторного торможения на реостат.
Известно устройство реостатного торможения электропривода с асинхронным двигателем и статическим преобразователем частоты, в котором управление приводом осуществляется путем автоматического поддержания баланса активных мощностей, отдаваемых двигателем при торможении и поглощаемых реостатом l .
Однако в этом устройстве ток, потребляемый от первичной сети, может быть принят линейно зависящим от частоты лишь в небольшом диапазоне частот вращения двигателя. Это уменьшает момент двигателя и увеличивает потребление тока из сети.
Наиболее близким по техническому решению к предлагаемому является устройство для автоматического управления асинхронным двигателем в режиме частотного торможения, содержащее
преобразователь частоты с блоком регулирования напряжения в звене постоянного тока инвертора, к которому подключен асинхронный двигатель, блок тормозных резисторов, соединенный через контактор с зажимами двигателя, блок регулирования тормозного режима, включающий блок суммирования, входа которого соединены
0 с датчиком тока в цепи питания инвертора и с блоком задания тока, соединенным с датчиком частоты вращения двигателя 2 .
Однако потребление дополнительно5го тока из сети снижает энергетические показатели устройства.
Целью изобретения является повышение энергетических показателей привода за счет уменьшения тока,
0 потребляемого из сети.
Для этого в предлагаемое устройство введен нелинейный блок коррекции, вход которого подключен к блоку задания тока, а выход - к блоку
5 суммирования.
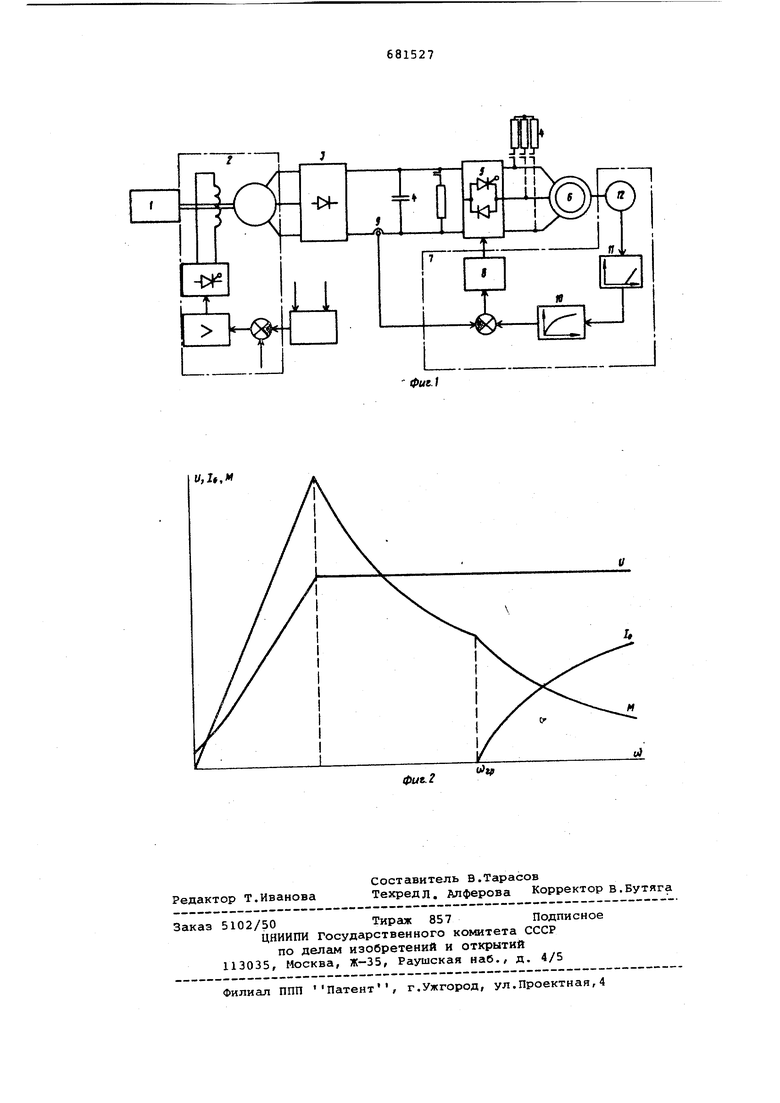
На фиг. 1 представлено предлагаемое устройство для автоматического управления на фиг. 2 - графики изменения момента тока и напряжения.
0
Устройство содержит первичный двигатель 1, например дизель, генератор 2 с блоком регулирования напряжения, выпрямитель 3, подключенный к генератору 2, блок 4 тормозных реаисторов, который может быть подключен на вход или выход инвертора 5. К последнему подсоединен асинхронный двигатель б. Блок 7 регулирования тормозного режима содержит сумматор 8, с которым соединены датчик тока 9 и нелинейный блок коррекции 10, связанный с блоком 11 задания тока генератора, соединенным с датчиком 12 частоты вращения двигателя. Блок 11 задания тока представляет собой пропорционально-пороговый элемент с регулируемой отсечкой, сигнал на выходе которого равен нулю при частотахj ниже частоты, заданной уставкой, и пропорционален частоте при частотах, выше заданной.
Устройство работает следующим образом.
При частотах, ниже граничной для привода при данных параметрах его силового оборудования, сигнал на выходе блока коррекции 10 равен нулю, и блок 7 изменяет автоматически частоту питающего напряжения так, что торможение протекает при отсутствии потрабления тока от генератора 2. Граничная частота вычисляется заранее и в соответствии с ней устанавливается отсечка в блоке 11.
При частотах вращения двигателя, выше граничной Шрр, на выходе блока 11 появляется сигнал, прямо пропорциональный разности частоты двигателя и граничной частоты. Блок 10 корректирует этот сигнал в соответствии со своей нелинейной проходной характеристикой, и скорректированный сигнал поступает на вход блока суммирования, на другой вход которого подается сигнал, пропорциональный току генератора от датчика тока 9,. Вследствие этого частота регулируется так, что торможение протекает при потреблении тока генератора 3„ . При этом асинхронный двигатель работает с критическим значением тормозноге- момента, а величина тока генератора имеет минимально возможную величину (см.фиг.2).
Блок коррекции 10 имеет нелинейную характеристику. Хависимость тока Зо от разности частот U-uUf-p в зоне частот, выше граничной, близка к DO К.Va-cf.Поэтому блок 10 может иметь характеристику i -/1, где , - входной, а i - выходной параметры блока.
Применение изобретения позволит
повысить энергетические показатели привода за счет увеличения его тормозного момента до критического во всем диапазоне частот, выша граничной, и за счет снижения мощности
источника питания, расходуемой в режиме торможения.
Формула изобретения
Устройство для автоматического управления асинхронным двигателем в режиме частотного торможения, содержащее преобразователь частоты
с блоком регулирования напряжения в звене постоянного тока инвертора, к которому подключен асинхронный двигатель, блок тормозных резисторов, соединеиннй через контактор,
например, с зажимами двигателя, блок регулирования тормозного режима, включающий блок суммирования, входы которого соединены с датчиком тока в цепи питания инвертора и с блоком
задания тока, соединенным с датчиком частоты вращения двигателя, отличающееся тем, что, с целью повышения энергетических показателе|5 привода за счет уменьшения тока, потребляемоего из сети при высоких частотах вращения, в устройство введен нелинейный блок коррекции, вход которого соединен с блоком задания тока, а выход - с блоком суммирования.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР f 466598, кл, Я 02 Р 3/22, 1970.
2.Патент США №3688171, кл. 318-211, опубл. 1972.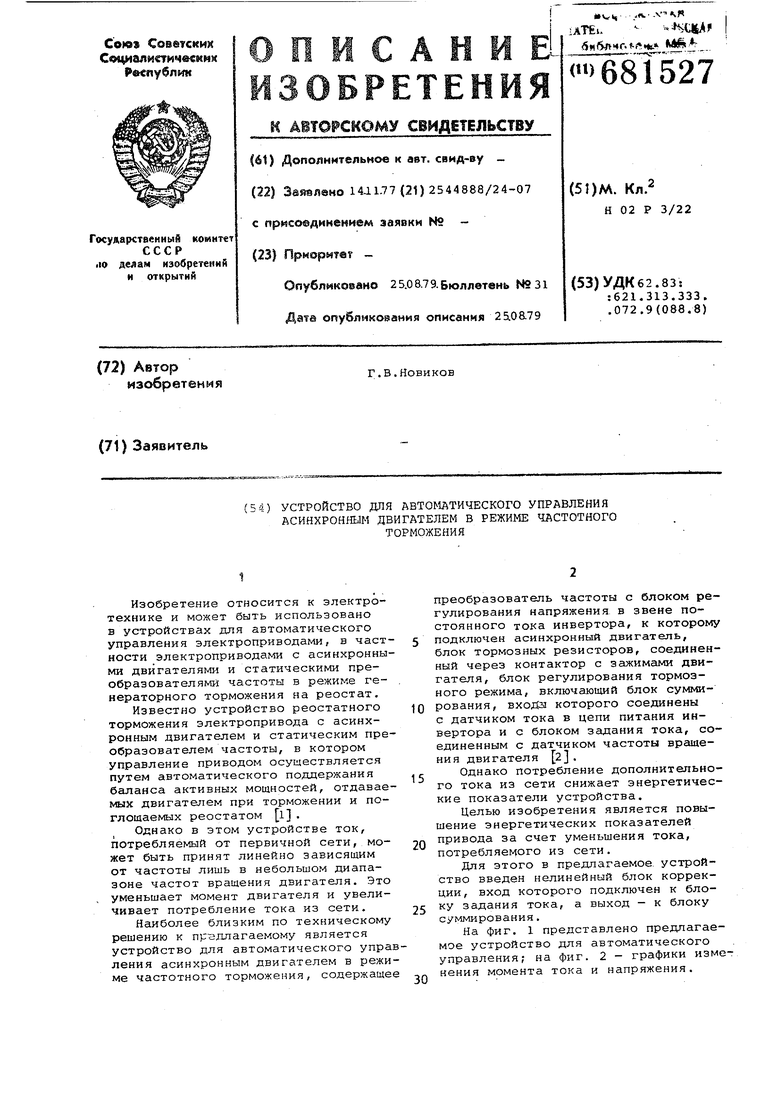

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулированияАСиНХРОННОгО ТягОВОгО дВигАТЕляпРи PEOCTATHOM ТОРМОжЕНии | 1977 |
|
SU821244A1 |
| Электропривод переменного тока | 1990 |
|
SU1750015A1 |
| Устройство для автоматического управления асинхронным двигателем в режиме частотного торможения | 1980 |
|
SU985912A1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2692288C1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU826543A1 |
| Частотно-управляемый тяговый электропривод | 1982 |
|
SU1072231A1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОГО ТОРМОЖЕНИЯ ТРЕХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2003 |
|
RU2242082C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ АВТОСАМОСВАЛА | 2021 |
|
RU2757093C1 |
| Устройство для управления многодвигательным электроприводом переменного тока | 1987 |
|
SU1422358A1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
M,I.M
фик.2
