сивности разгона первым входом соединен с выходом преобразователя частота-напряжение, вторым входом связан с выходом блока задания скорости, а выходом подключен к втором входу второго блока суммирования. 2. Электропривод по п.1, отличающийся тем, что блоки вычитания частот и п ереключатель режимов содержат J-K триггер, три ячейки И, две ячейки ИЛИ, при этом вход J триггера соединен с выходом импульсного датчика скорости, Квход триггера связан с выходом блока задания частоты тока ротора, а выход подключен к первому входу первой ячейки И, второй вход которой свя:зан с выходом импульсного датчик
скорости, а выход соединен с первым входом второй ячейки И, второй вход
:которой подключен к выходу D-тригfepa, первая ячейка ИЛИ входом соединена с выходом D-триггера, а выходом подключена к первому входу . третьей ячейки И, второй вход которой связан с выходом сумматора частот, вторая ячейка ИЛИ первым входо
.соединена с выходом второй ячейки
.И, вт6рь 1 входом связана с выходом третьей ячейки И, а выходом подключена к блоку усреднени) импульсной последовательности .
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-управляемый тяговый электропривод | 1982 |
|
SU1072230A1 |
| Частотно-управляемый тяговый электропривод | 1984 |
|
SU1211843A1 |
| Частотно-управляемый тяговый электропривод | 1984 |
|
SU1252902A1 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1552334A1 |
| Регулятор частоты для асинхронного тягового электропривода | 1982 |
|
SU1026275A1 |
| Многодвигательный электропривод | 1983 |
|
SU1115192A1 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| Устройство для частотного управления тяговым асинхронным электродвигателем | 1980 |
|
SU877768A1 |
| Способ управления автономнымэлЕКТРОпРиВОдОМ пОСТОяННОгО ТОКАгРузОпОд'ЕМНОгО МЕХАНизМА и уСТРОйСТВОдля ЕгО РЕАлизАции | 1979 |
|
SU843139A1 |
1. ЧАСТОТНО-УПРАВЛЯЕМЫЙ ТЯГОВЫЙ ЭЛЕКТРОПРИВОД, содержащий асинхронный двигатель, подключенный.; к преобразователю частоты с каналами управления амплитудой и частотой напряжения, датчик тока, выходом через нелинейный блок обратной связи по току соединенный с первым входом первого блока суммирования, второй . вход которого через регулятор скорости соединен с выходом второго блока суммирования, а выход первого блока суммирования через регулятор тока тягового режима связан с входом канала управления амплитудойнапряжения преобразователя частоты, импульсный датчик скорости двигателя, выходом подключенный к первому входу сумматора частот, второй вход которого связан с блоком задания частоты тока роторву а выход через блок усреднения импульсной последовательности связан с входом канала управления частотой напряжения - преобразователя частоты, кроме того, выход импульсного датчика скорости через преобразователь частота-напряжение связан с первым входом нели- нейного блока обратной связи по. скорости, выходом подключенный и первому входу второго блока суммирования, а вторые входы нелинейного блока обратной связи по скорости и второго блока суммирования связаны с выходом блока задания скорости, о т л и ч/.а ю щ и и с я тем, что, с. делью расширения функциональных возможностей за счет обеспечения как тягового, так и тормозного ре Жимов,введены пер эключатель каналов, регулятор тока тормозного режима, третий блок суммирования, задатчик интенсивности торможения, ключ, блок задания:тормозного момента, блок вычитания частот, переключатель режимов, первый и второй компараторы, D-триггер, задатчик интенсивности разгона, при этом переключатель каналов первым входом соединен с выходом регулятора тока тягового режима, а вторым входом подключен к выходу регулятора тока (Л тормозного режима, вход которого связан с выходом третьего блока суммирования, первый вход третьего блока суммирования соединен с выходом нелинейного блока обратной связи по току, а второй вход через задатчик интенсивности торможения и ключ подключен к выходу блока задания тормозного момента, блок вычитания часч от первым входом соединен с выходом импульсного датчика скорости, N3 второй вход связан с блоком задания Ю (Частоты тока ротора, а выход подклюCAD чен к первому входу пepeкJпoчaтeля режимов, втором входом связанного с выходом сумматора частот, а выходом соединенного с входом блока усреднения импульсной последовательности, первый компаратор входом связан с выходом блока задания тормозного момента, а .выходом соединен с D и R входами D-триггера и с управляющим входом переключателя каналов, причем выход D-триггера подключен к управляющим входам ключа и переключате тя режимов, второй компаратор входом соединен с выходом датчика тока, а выходом подключен к входу синх.рони(заиии D-триггера, а зэдатчик интен
Изобретение относится к электротехнике, а точнее к частотно-управляемьм тяговым электроприводам.с асинхронными короткозамкнутыми двигателями, и может быть использовано при создании тяговых приводов осей колесных транспортных cpeflCTjB, особенно с автономными источниками энергии на основе дизель-генераторов.
Известен частотно-управляемый тяговый электропривод, содержащий асинхронный двигатель, подключенный к преобразователю частоты с каналами управления амплитудой и.частотой напряжения, датчик тока, блоки суммирования, регулятор тока, регулятор скорости, импульсный датчик скорости функциональные преобразователи и блоки нелинейностей Cl Недостатками данного частотноуправляемого тягового электропривода являются сложность схемы, невысокая точность регулирования, недостаточное быстродействие и ограниченные функциональные возможности.
Наиболее близким к предлагаемому по-технической сущности является частотно-управляемый тяговый электропривод, содержащий асинхронный двигатель, подключенный к преобразователю частоты с каналами управления амплитудой и частотой напряжения, датчик тока, выходом через нелинейный блок обратной связи по току соединенный с первым входом первого блока суммирования, второй вход которого через регулятор скоростиГ соединен с выходом второго блока суммирования через регулятор тока тягового режима связан с входом канала управления ампли тудоп напряжения преобразователя частоты, импульсный датчик скорости двигателя, выходом подключенный к первому входу сумматора частот, второй вход которого связан с блоком
задания частоты тока,ротора, а выход через блок усреднения импульсной последовательности соединен с входом канала управления частотой напряжения преобразователя частоты, кроме того, выход импульсного датчика скорости через преббразователь частотанапряжение связан с первым входом нелинейного блока сигнала обратной
Q связи по скорости, выходом подключенного к первому входу второго бло,касуммирования, а вторьте входы нелинейного блока обратной связи по скорости и второго блока суммирова ния связаны с выходом блока задания
скорости t }
Недостатками известного частотноуправляемого тягового электропривода являются невозможность перевода его в тормозной режим. Кроме того,
0 в режиме разгона при резком увеличении сигнала задания скорости злек.тропривод будет начинать разгон с максимальным моментом, что может привести к рывкам или пробуксовыванию
5 колес транспортного средства. Все это ограничивает функциональные возможности электропривода.
Цель изобретения - расширение функциональных возможностей за счет
0 обеспечения как тягового, так и тормозного режимов частотно-управляемого тягового электропривода.
Поставленная цель достигается тем, что в частотно-управляемом тяговом
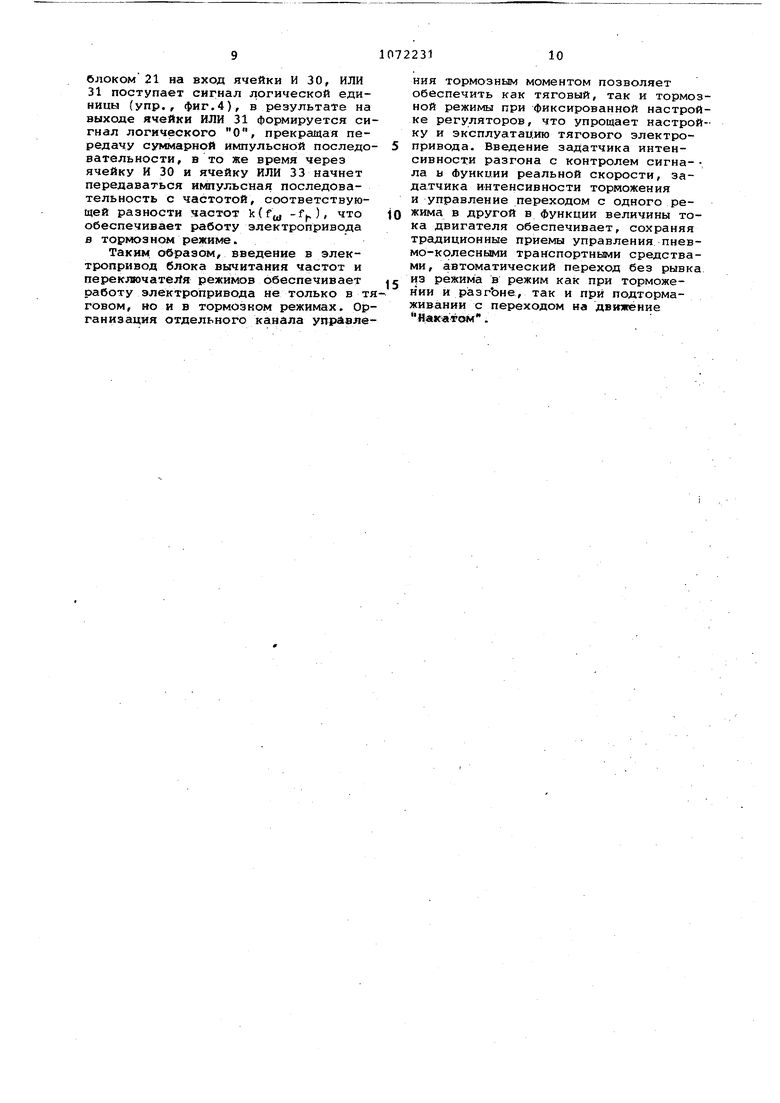
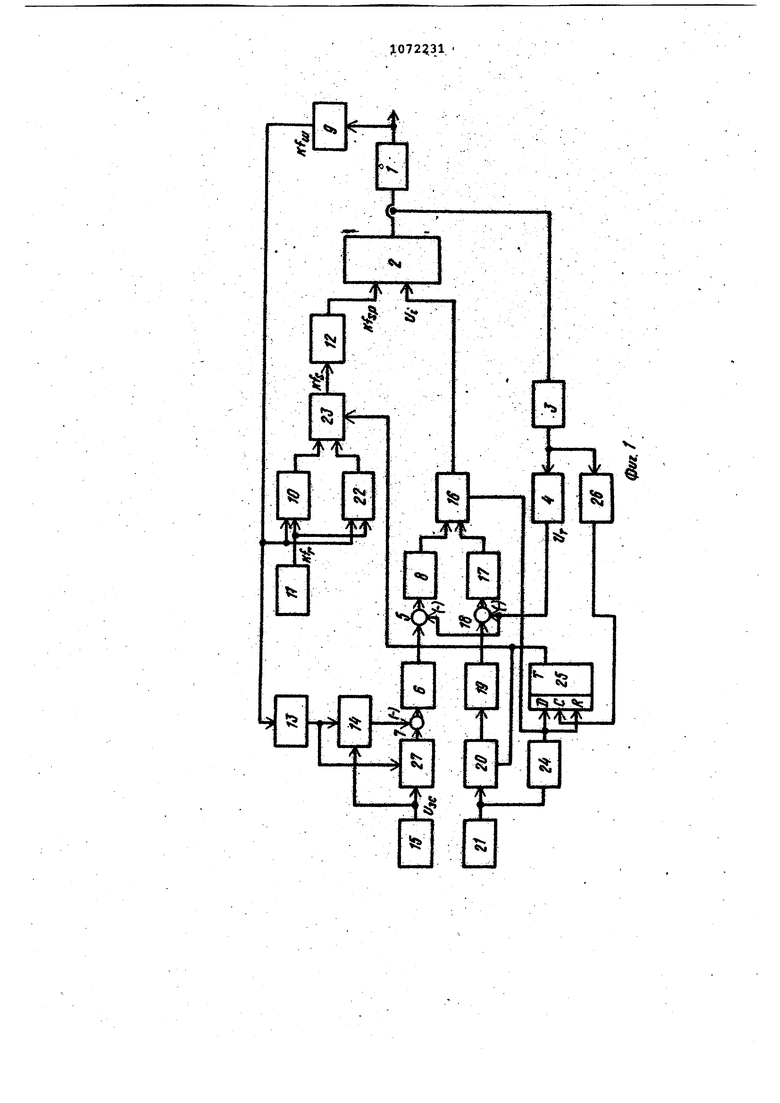
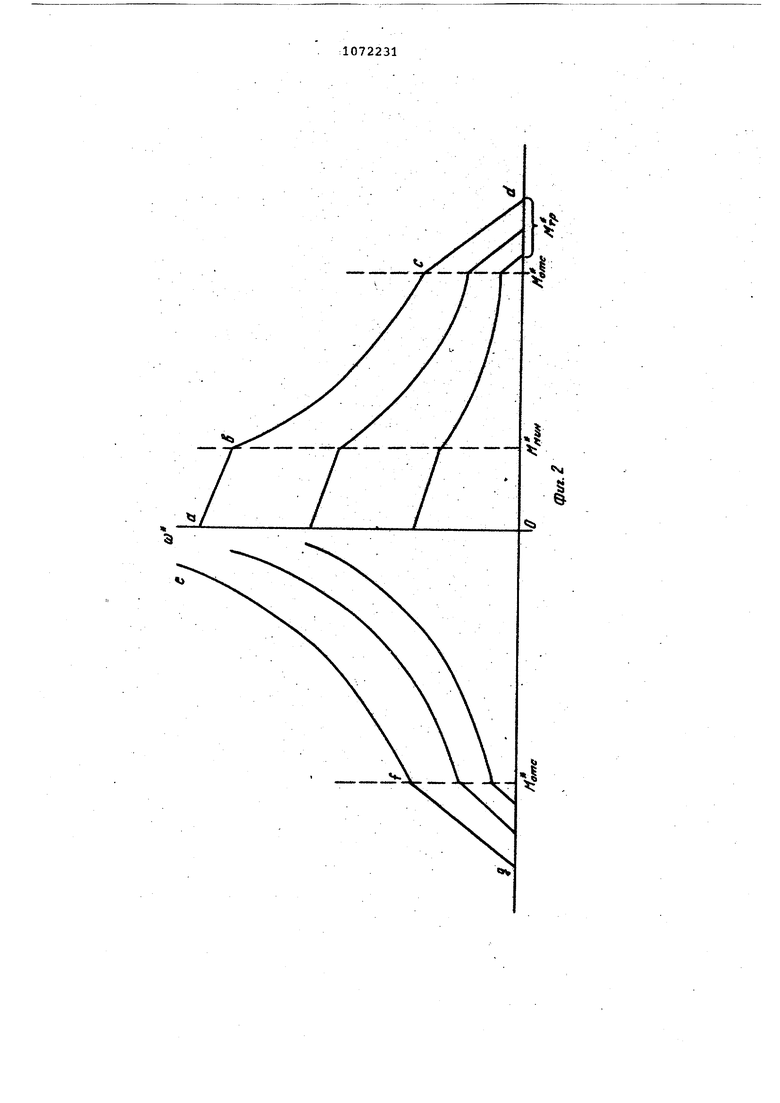
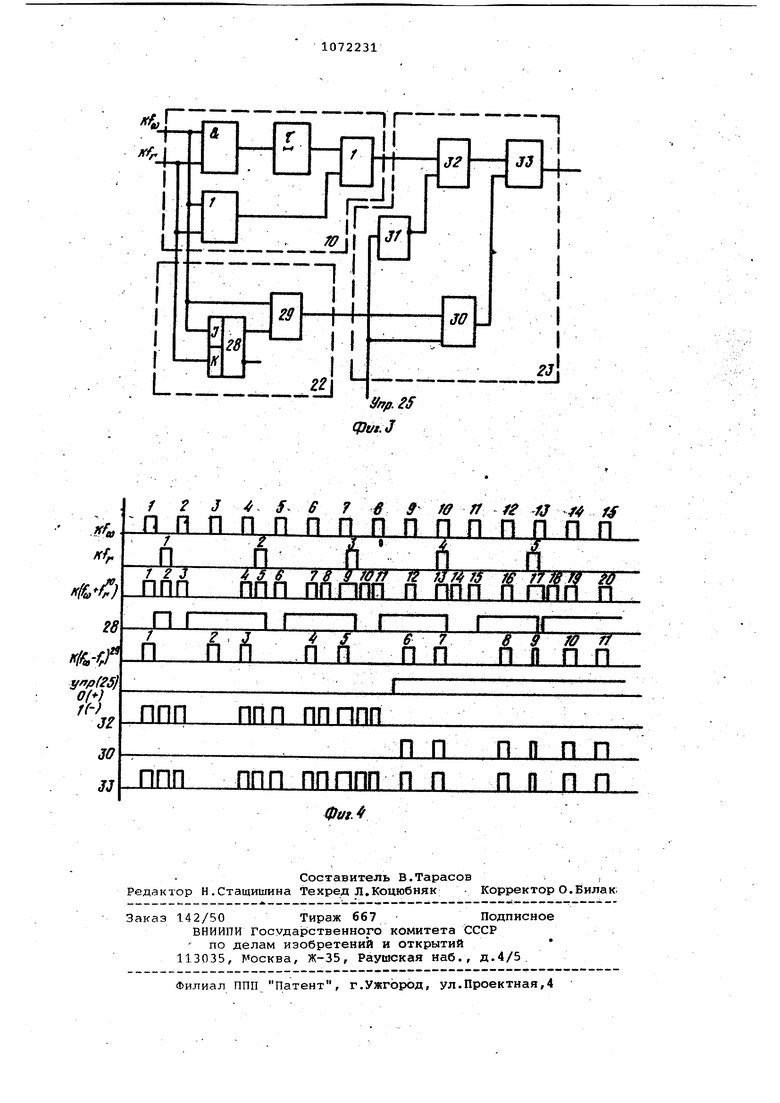
электроприводе, содержащем асинхронный двигатель, подключенный к преобразователю частоты с каналами управления амплитудой и частотой напряжения, датчики тока, выходом через нелинейный блок обратной связи по току 0 соединенный с первым входом первого блока суммирования, второй вход которого через регулятор скорости соединен с выходом второго блока суммированяя, а выход первого блока суммирования через регулятор тока тягового режима связан с входом канала управления амплитудой напряжения преобразователя частоты, импульсный датчик скорости двигателя, выходом -подключенный к первому входу сумма тора частот, второй вход которого связан с блоком задания частоты ротора , а выход через блок усреднения импульсной последовательности связан с входом канала управления Частотой напряжения преобразователя частоты, кроме того, выход импульсного датчика скорости через преобразователь частота-напряжение связан с первым входом нелинейного блока обратной связи по скорости, выходом подключенного к первому входу второго блока суммирования, а вторые входы нелинейного блока обратной связи по скорости и второго блока суммировани связаны с выходом блока задания скорости, введены переключатель каналов , регулятор тока тормозного режима, третий блок суммирования, задатчик интенсивности торможения, ключ, блок задания тормозного момента, бло вычитания частот, переключатель режи мов , первый и второй компараторы, D-триггер, задатчик интенсивности разгона,при этом переключатель каналов первым входом соединен с выходом регулятора тока тягового режима, а вторым входом подключен к выходу регулятора тока тормозного режима, вход которого связан с выходом третьего блока суммирования, первый вход третьего блока суммирования соединен с выходом нелинейного блока обратной связи по току, а второй вход через задатчик интенсивности то{эможения и ключ подключен к выходу блока задания тормозного момента блок вычитания частот первым входом соединен с выходом импульсного датчи ка скорости, второй вход связан с блоком задания частоты тока ротора, а выход подключен к первому входу переключателя режимов, вторым входом связанного с выходом сумматора частот, а выходом соединенного с axd дом блока усреднений импульсной по следовательности, первый компаватор входом связан с выходом блока задания тормозного момента, а выходом со единен с D. и R входами Dj-триггера и с управляющим входом перёключателя каналов, причем выход D-триггера подключен к управляющим входам ключа и переключателя режимов, второй компаратор -ВХОДОМ соединен с выходом датчика тока, а выходом подключен к входу синхронизации D-триггера, а задатчик интенсивности разгона первым входом соединен с выходом преобразователя частота-напряжение,вторым входом связан с выходом блока .. задания скорости, а выходом подключен к второму входу второго блока суммирования. Блоки вычитания частот и переключатель., режимов содержит J-K триггер, три ячейки И, две ячейки ИЛИ, при этом вход J триггера соединен с выходом импульсного датчика скорости, К-вход триггера связан с выходом блока задания частоты тОка ротора, а выход подключен к первому входу первой ячейки И, второй вход которой связан с выходом импульсного датчика скорости, а выход соединен с первым входом второй ячейки И, второй вход которой подключен к выходу D-триггера, первая ячейка ИЛИ входом соединена с выходом D-триггера, а выходом подключена к первому входу третьей ячейки И, второй вход которой связан с выходом сумматора частот, вторая ячейка ИЛИ первым входом соединена с выходом Второй ячейки И, вторым входом связана с выходом третьей ячейки И, а выходом подключена к блоку усреднения импульсной последовательйости. На фиг.1 приведена функциональная схема частотно-управляемого тягового электропривода; на фиг.2 - механические характеристики электропривода; на фиг.3 - схема блока вычитания и переключателя режимов; на фиг.4 диаграмма, поясняющая формирование управляющей импульсной последовательности. Электропривод {фиг.1) содержит асинхронный двигатель 1, подключенный к преобразователю 2 частоты с каналами управления амплитудой и и частотой kfpp напряжения, датчик 3 тока, выходом через нелинейный блок 4 обратной связи по току соединенный с первым входом первого блока 5 суммирования, второй ВХОД которого через регулятор 6 скорости соединен с выходом второго блока 7 суммирования, а выход первого блока суммирования подключен к входу регулятора 8 тока тягового режима. Импульсный датчик 9 скоЕЮсти двигателя выходом подключен к первому входу сумматора 10 частот, второй его вход соединен с блоком 11 задания частоты тока ротора, а выход связан с входом канала управления частотой напряжения преобразователя частоты через блок 12 усреднения импульсной последовательности. Кроме того, выход импульсного датчика скорости двигателя соединен с входом преобразователя 13 частотанапряжение, выход которого связан с первым входом нелинейного блока 14 сигнала обратной связи по скорости, второй вход которого соединен с выходом блока 15 задания скорости, а выход подключен к первому входу второго блока 7 сум 1ирования. Вход ка нала управления амплитудой напряже;- ния преобразователя частоты соедине с регуляторами через переключатель 16 каналов, первый вход которого соединен с выходом регулятора 8 ток тягового режима, а второй вход через регулятор 17 тока тормозного режима связан с выходом третьего блока суммирования 18. Первый вход третьего блока суммирования соединен с выходом нелинейного блока 4 обратной связи по току, а второй вход через зада.тчик 19 интенсивности торможения и ключ 20 связан с выходом блока 21 задания торможного момента. Блок 22 вычитания частот соединен первым В.ХОДОМ с выходом импульсного датчика 9 скорости, вторым входом связан с выходом блока задания частоты тока ротора, а выходом подключей к первому входу переключателя 2 режимов, вторым входом связанного с выходом сумматора 10 частот, а выхо дом соединенного с входом блока 12 усреднения импульсной последователь ности. Первый компаратор 24 входом связан свыходом блока 21 задания тормозного момента, а выходом соединен с D- и R-входами D-триггера 25 и с управляющим входом переключателя 16 каналов, причем выход D-тр ггера подключен к управляющим входам ключа и переключателя режимов. Второй компаратор 26 входом соединен с выходом датчика тока, а выходом подключен к входу синхронизации D-триггера. Задатчик 27 интенсивности разгона первым входом соединен с выходом преобразователя частота-напряжение , вторым входом связан с выходом блока 15 задания скорости, а выходом подключен к второму входу второго блока суммирования. На фиг.З приведены схемы блока 22 вычитания частот и переключателя 23 режимов, образующих с сумматором 10 частот блок формирования частотьк Здесь JK-триггер 28 J-BXOJIOM соединен с выходом импульсного датчика скорости, К-входом подключен к выходу блока задания частоты тока ротора а выходом связан с первым входом первой ячейки И 29 л второй вход кото рой соединен с выходом импульсного датчика скорости, а выход подключен к первому входу второй ячейки И 30, второй вход которой связан с выходом D-триггера. Первая ячейка ИЛИ 31 входом соединена с выходом D-триггера 25, а выходом подключена к первому входу третьей ячейки И 32, второй вход которой связан с выходом сумматора 10 частот, вторая ячейка ИЛИ 33 первым входом соединена с зыхоifbM второй ячейки И 30, вторым входом связана с выходом третьей ячейки И, а выходом подключена к блоку усгреднения импульсной последовательности. Частотно-управляемый тяговый электропривод работает следующим образом. ПРИ трогании с места к асинхронному двигателю 1 (фиг.1) от преобра- зователя 2 частоты подается напряже- ние с начальной частотой, определяемой заданной частотой тока ротора kfy, при этом начинает нарастать ток статора и момент на валу двигателя. Ток статора датчиком 3 тока преобразуется в уровень напряжения сигнала обратной связи по току, который поступает на вход нелинейного блока 4 обратной связи по току (фиг.1). При достижении током величины, соответствующей моменту отсечки (,фйг.2) , сигнал на выходе датчика тока достигает уровня открытия нелинейного блОка 4 и с его выхода сигнал поступает на первый вход первого блока 5 суммирования. Здесь он сравнивается с сигналом управления скоростью, формируемым.регулятором 6 скорости под действием сигнала Управления с выхода второго блока 7 суммирования, и сигнал ошибки по току регулятором тока тягового режима формирует сигнал U управления амплитудой напряжения на выходе преобразователя частоты. В результате электропривод форсированно переходит в режим ограничения тока на уровне Мпвр(фиг.2) и двигатель начинает разгоняться при частоте на выходе преобразователя частоты, равной заданной частоте тока ротора. В результате вращения ротора двигателя на выходе импульсного датчика 9 скорости (фиг.1) начинает формироваться импульсная последовательность с частотой, пропорциональной скорости вращения. Эта импульсная последовательность k складывается в сумматоре частот с k Гр, формируемой блоком задания частоты тока ротора, и усредняется в блоке 12 усреднения импульс ной последовательности. В результате частота напряжения на выходе преобразователя начинает увеличиваться, а ток статора двигателя - уменьшаться. При дальнейшем увегичении скорости ток статора снижается до уровня, соответствующего моменту отсечки (М ,фтлг.2 . Нелинейный блок 4 сигнала обратной с.вязи по току отключает сигнал. U с входа блока 5 суммирования. Электропривод переходит в рабочий режим с предельньа и характеристиками Р const (участок be , фиг.2). При уменьшении момента на-, грузки до М Mj5iHH (.2) сигнал на выходе преобразователя частотанапряжение 13 достигает уровня включения нелинейного блока 14 сигнала обратной связи по скорости, и на выходе сумматора 7 сигнал управления скоростью будет уже определяться раз ностью сигнала задсц ия скорости U|e формируемого блоком 15 задания .скоро сти, и сигнала обратной связи на выходе блока 14, Электропривод переходит в режим ограничения скорости (участки с характеристик, фиг.2). При работе в двигательном режиме вигнал управления амплитудой напряжения формируется регулятором 8 тока тягового режима, выход которого пере ключателем 16 каналов подключается к входу канала управления напряжением преобразователя частоты. При переходе в тормозной режим переключатель 16 кангшов подключает к входу канала управления напряжением преоб разователя частоты выход регулятора 17 тока тормозного режима, который через третий блок 18 суммирования, задатчик 19 интенсивности торможения и ключ 20 управляется сигналом блока 21 задания тормозного момента. Одновременно блок 22 вычитания частот переключателем 23 режимов че рез блок 12 усреднения импульсной последовательности подключается к входу канала управления частотой напряжения преобразователя частоты. Перевод электропривода в тормозной режим осуществляется следующим образом. При появлении сигнала зада ния тормозного момента на выходе блока 21 независимо от уровня сигна ла Эсщания скорости компаратор 24 сформирует на выходе сигнал логической единииы. Этот сигнал подаетс на входы D и -R D-триггера 25 и на управляющий вход переключателя 16 каналов, который отключит от преобразователя частоты регулятор тока тягового режима и подключит регулятор тока тормозного режима. Однако на выходе регулятора тока.тормозного режима сигнал будет отсутствоват и ток двигателя снизится до нуля, При этом компаратор 26 сформирует на выходе сигнал логической 1, ко торый поступит на вход С синхрониза ции D-триггера и пройдет.на управля гацие входы ключа 20 и переключателя 23 режимов, В результате ключ 20 Зсцикнет чепь сигнала задания тормой ного момента и через задатчик 19 ин тенсивности торможения на входе тре тьего cyiva aTOpa 18 начнет нарастать сигнал управления торможением с тем пом, определяемым постоянной интег- рирования задатчика 19.. Одновременно переключатель 23 режимов отключи вьаход сумматора частот и подключит блок 22 вычитания частот через блок 12 к входу канала управления частотой напряжения преобразователя частоты, .В результате частота напряжения на выходе преобразователя будет определяться разностью частот f и электропривод перейдет в режим торможения (участок ef, фиг.2),скорость будет падать, а ток и момент двигателя нарастать. При увеличении тормозного мсмента до уровня М. нелинейный блок 4 обратной сьязи по току подключит выход датчика 3 тока к входу блока 18 суммирования и электропривод перейдет в режим ограничения тормозного мснмента (участок fg., фиг,2). При сбросе сигнала задания тормозного, мсшента произойдет обратное переключение каналов и благодаря наличию связи между выходом преобразователя частота-напряжение и входом задатчнка 27 интенсивности разгона на выходе последнего будет сигнал., уровень которого соответствует ре.альной скорости, что автоматически обеспечит переход из тормозного режима в тяговый без рывка. Если сигнал Зсщания скорости будет больше сигнала на выходе преобразователя частота-напряжение. Привод плавно перейдет на более высокую скорость, Если же сигнал задания скорости меньше, то электропривод плавно перейдет на более низкую скорость, соответствующую уровню . Импульсная последовательность, определяющая частоту напряжения на выходе преобразователя частоты, формируется сумматором 10 частот (Фиг,3) блоком вычитания частот и переключателем 23 режимов. На входы сумматора 10 частот подаются две импульснне последовательности с частотами kf и kfj,, а на его выходе Формируется суммарная импульсная последовательность К (Гц, f р ) (фиг. 4,10). Одновременно импульсная последовательность с частотой kf (фиг. 4 ) подается на J вход установки 1 ,ТК-триггера 28 (фиг,3) и на второй вход первой ячейки И 29, а на К вход установки О JK-тряггера поступает импульсная последовательность с частотой КГр(фиг.4), в результате логическая ячейка И 29 пропустит только те импульсы , которые совпадают во времени с логической единицей на выходе JK-триггера 28 (фиг,4). Это обеспечивает на выходе ячейки И 29 формирование импульсной последовательности с частотой k(f(-r) 29 (фиг,4). При отсутствии сигнала задания тормозного момента на выходе блока 21 (фиг.1), -на выходе триггера 26 формируется сигнал логического О (упр., фиг.3,4), который закрывает ячейку И 30 и поступает на вход ячейки ИЛИ 31 (фиг.З). На выходе этой ячейки он инвертируется в сигнал логической 1, и через ячейку И32 и ячейку ИЛИ 33 (фиг.3,4) начинает проходить импульсная последовательность с частотой обеспечивая тяговый режим электропривода. При Лормирований сигнала задания тормозного момента
блоком 21 на вход ячейки И 30, ИЛИ 31 поступает сигнал логической единицы (упр., фиг.4}, в результате на выходе ячейки ИЛИ 31 формируется сигнал логического О, прекращая передачу суммарной импульсной последовательности, в то же время через ячейку И 30 и ячейку ИЛИ 33 начнет передаваться импульсная последовательность с частотой, соответствующей разности частот )/ что обеспечивает работу электропривода в тормозном режиме.
Таким образом, введение в электропривод блока вьгаитания частот и перекяочатеЛя режимов обеспечивает работу электропривода не только в тяговом, но и в тормозном режимах. Организация отдельного канала упрАвления тормозным моментом позволяет обеспечить как тяговый, так и тормозной режимы при фиксированной настройке регуляторов, что упрощает настройку и эксплуатацию тягового электропривода. Введение задатчика интенсивности разгона с контролем сигна- ла ь функции реальной скорости, задатчика интенсивности торможения и управление переходом с одного режима в другой в функции величины тока двигателя обеспечивает, сохраняя традиционные приемы управления пневмо-колеснь га транспортными средствами, автоматический переход без рывка 43 режима в режим как при торможении и разгЪне, так и при подтормаживании с переходом на движение Накагом.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент ФРГ 1563228, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3439055/07,кл.Н 02Р7/42, 1982. | |||
