ройствами 9, одноребордных дисков 10, дугообразных упоров 11.
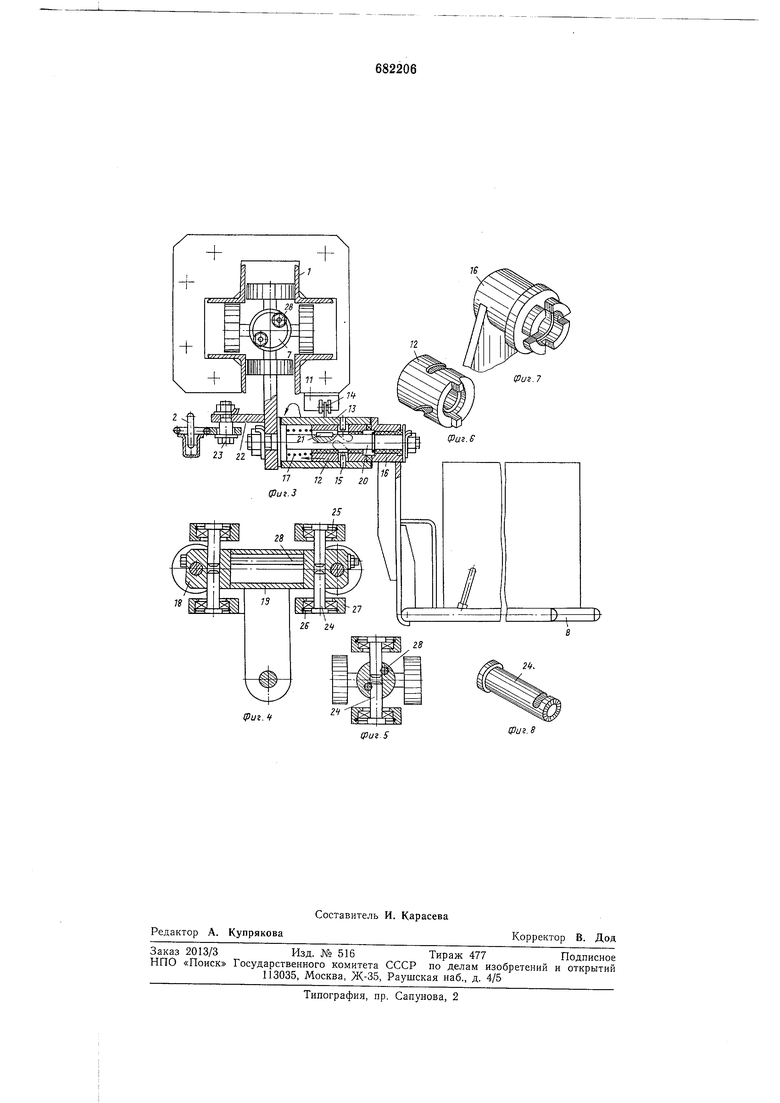
Фиксирующее устройство (см. фиг. 3, 6, 7) включает втулку 12 корпус 13 поворотного шарнира люльки с роликовым рычагом 14 и пальцами 15, головку 16 поворотного шарнира люльки, пружину 17.
Каретка (см. фиг. 2, 4, 5, 8) состоит из двух роликовых крестовин 18, кронштейна 19, оси 20, шпонки 21, проушины 22, болта 23, пальцев 24, подшипников 25, пружинных колец 26, роликов 27, продольных стержней 28.
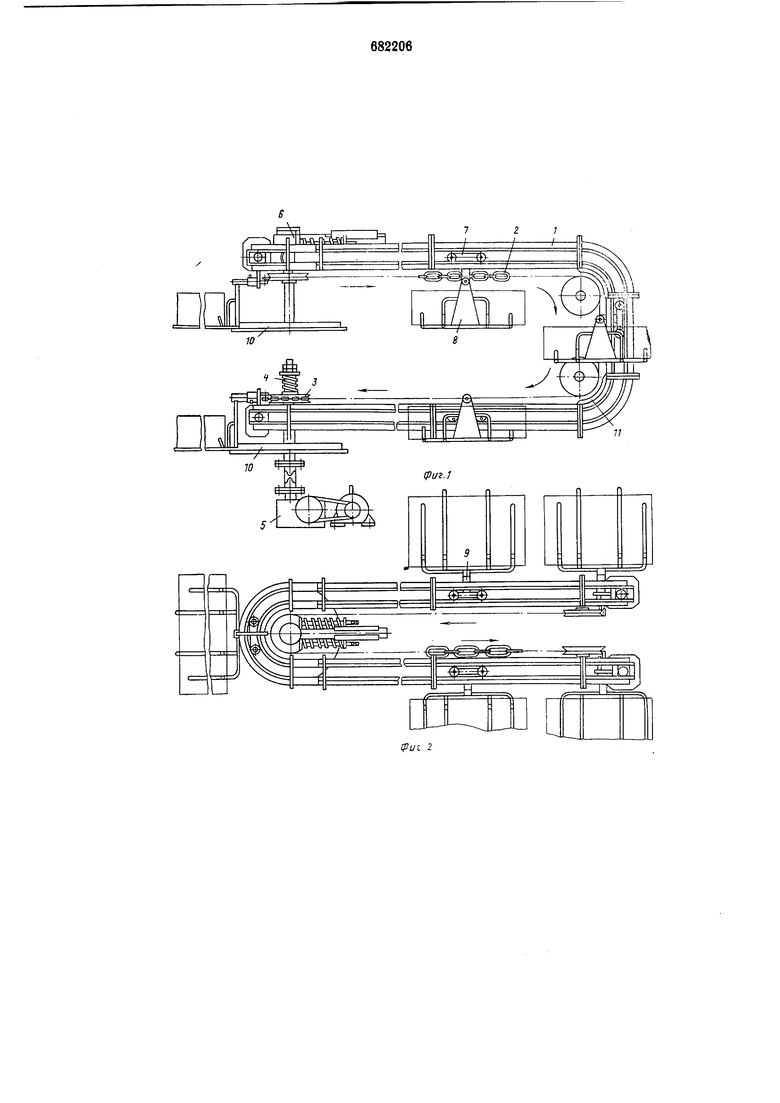
Подвесной грузонесуший конвейер работает следующим образом.
Движение люльки 8 передается от привода 5 через звездочку 3 с предохранительной кулачковой муфтой 4, тяговую круглозвенную цепь 2 и каретку 7. Цепь 2 соединена с кареткой 7 посредством болта 23, свободно установленного в отверстии пластины, приваренной к горизонтальному звену цепи. Одноребордные диски 10 служат для поддержания люльки 8 при повороте и плавного ее поворота. При прохождении кареткой 7 вертикальных поворотов ходового пути конвейера происходит освобождение от осевой фиксации головки поворотного шарнира люльки посредством поворота вокруг оси 20 корпуса 13 при набегании на дугообразный упор 11 роликового рычага 14. При этом корпус 13, проворачиваясь вокруг своей оси, посредством пальцев 15 перемещает влево втулку 12, установлен подвижно на шпонке 21, выводя ее торцовые выступы из зацепления с пазами головки 16, сжимая при этом пружину 17. После прохождения кареткой 7 вертикального поворота роликовый рычаг 14 сходит с дугообразного упора И, корпус 13 поворачивается в исходное положение под действием пружины 17, перемещающей втулку 12 вправо до зацепления с головкой 16 люльки.
Ось 20 и проушина 22 установлены в кронштейне 19 каретки, соединяющем две крестовины 18, в которых установлены пальцы 24 с роликами 27. Пальцы 24 имеют на конце поперечную проточку и после установки в крестовину 18 надежно фиксируются от проворачивания и осевого перемещения продольными стержнями 28. Такая конструкция обеспечивает надежное крепление пальцев 24 и их быстрый демонтаж. На пальцах 24 на подшипниках 25 установлены ролики 27, посредством кото5 рых каретка 7 перемещается в ходовом пути, состоящем из четырех уголков. Подшипники 25 закрепляются в роликах 27 при помощи пружинных колец 26. Такая конструкция каретки и ходового
0 пути, боковое расположение тяговой цепи и люльки позволяют перемещать в пространстве груз в любом необходимом направлении.
Использование изобретения позволит
5 расширить область применения конвейера, уменьшить его габариты, повысить ремонтопригодность, надежность и долговечность, обеспечить возможность транспортирования грузов по любой траектории.
Формула изобретения
1.Подвесной грузонесущий конвейер, включающий пространственный многоярусный путь с поворотами, расположенными в горизонтальной и вертикальной плоскостях, каретки, люльки, связанные с последними посредством поворотных шарниров, заключенных в корпуса, тяговую цепь и
0 привод, отличающийся тем, что, с целью обеспечения надежности работы конвейера, каждая каретка снабжена фиксирующим устройством, установленным в корпусе поворотного шарнира люльки, а на
.3 поворотах пути, расположенных в вертикальной плоскости, установлены дугообразные упоры, при этом каретка состоит из двух роликовых крестовин, соединенных между собой кронштейном, на котором кон0 сольно расположена ось для крепления люльки и проушина для крепления каретки к тяговой цепи.
2.Конвейер по п. 1, отличающийся тем, что корпус поворотного шарнира имеет радиальные пазы, расположенные на торце, а фиксирующее устройство состоит из втулки, двух пальцев и роликового рычага, при этом на торце втулки выполнены радиальные выступы, размещаемые в радиальных пазах корпуса поворотного шарнира, а на образующей втулки имеется два наклонных продольных паза. i t4Lvf t - и
ipuz. 4
Фиг. S
Фиг. 5
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для образования поперечных швов на рукавной пленке и разрезания ее | 1976 |
|
SU659459A1 |
| МОСТОВОЙ БЛОК МНОГОПРОЛЕТНОГО МОСТА И КАРЕТКА ПРИВОДА (ЕЕ ВАРИАНТЫ) | 1993 |
|
RU2057836C1 |
| АВТОМАТИЧЕСКИЙ МЕХАНИЗМ ЗАРЯЖАНИЯ ПУШКИ | 2001 |
|
RU2195617C1 |
| Стенд для сборки траков гусеничной цепи | 1988 |
|
SU1549667A1 |
| Автомат для группирования и установки бутылок в стандартные ящики с перегородками | 1957 |
|
SU112199A1 |
| Одноцепной конвейер | 1958 |
|
SU116100A1 |
| Автомат для гибки изделий из проволоки | 1989 |
|
SU1641490A1 |
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| Устройство для конвейерного обслуживания животных | 1985 |
|
SU1356996A1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ УГЛОВ УСТАНОВКИ КОЛЕС ПЕРЕДНЕЙ ПОДВЕСКИ | 2000 |
|
RU2177147C1 |