Изобретение относится к области обработки металлов давлением, а именно к автоматизации свободной ковки поковок с вытянутой осью.
Известно устройство осевого перемещения хобота ковочного манинулятора, содержащее пневмоцилиндр установки хобота в среднее полол :ение и гидроцилиндр осевого перемещения, связанный с гидравлической системой управления, состоящей из насоса и распределительной и предохранительной аппаратуры 1.
Недостатком известного устройства является сложность и малая надежность системы управления в целом.
Целью изобретения является повыщение надежности путем улучщения демпфировапия колебаний в режиме шлихтовки.
Указанная цель достигается тем, что гидроцилиндр осевого перемещения выполнен с четырьмя отверстиями для подвода рабочей жидкости от распределительной аппаратуры гидросистемы, причем два отверстия расположены в средней части гидроцилиндра, соединены с гидросистемой через обратные клапаны и расстояние между ними меньще высоты порщня, а два других - на его концевых участках и соединены между собой двумя магистралями с управляемыми предохранительными клапанами.
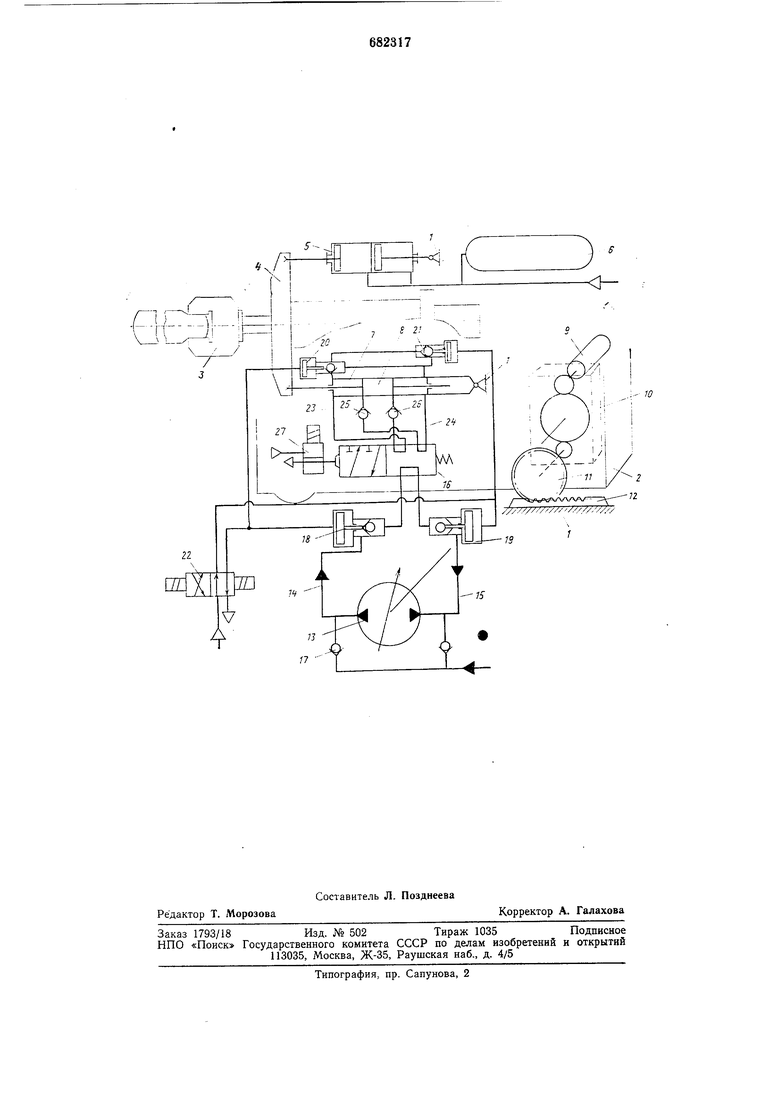
На чертеже изображена иринципиальная схема устройства.
В корпусе 1 устройства свободно подвещен на тележке 2 хобот 3.
Корпус 4 передней опоры хобота соединен с штоком пневмоцилиндра 5 установки хобота в среднее положение, второй щток которого соединен с корпусом устройства. Цилиндр 5 имеет фиксированное среднее положение п удерживает хобот в исходном положении благодаря давлению в ресивере 6.
Корпус 4 соединен также с штоком гидроцилиндра 7 осевого перемещения, порщень 8 которого имеет длину, равную половине полного хода. Гильза цилиндра шарнирно соединена с корпусом 1 устройства.
Тележка 2 приводится в электродвигателем 9 через редуктор 10, выходной вал которого несет на себе звездочку 11, сцепленную с рейкой 12.
Звездочка 11 через редуктор 10 соединена с валом гидронасоса 13. Гидронасос 13
соединен с гидроцилиндром 7 с помощью
трубопровода 14, 15 через золотник 16.
Трубоироводы 14 и 15 соединены также с
источником небольшого постоянного давления подпитки через обратные клананы 17. 3 в трубопровод, соединяющий гидронасос с золотником, включены управляемые обратные клапаны 18 и 19. Гидроцилиндр 7 выполнен с четырьмя отверстиями для подвода рабочей жидкости, причем два отверстия, расположенные на его конценых участках, соединены между собой двумя магистралями с управляемыми предохранительными клапанами 20 и 21, установленными параллельно гидроцилиндру 7. Воздухораспределитель 22 соединяется с управляющими полостями клапанов 18, 20 или 19 и 21. Золотник 16 соединяется с гильзой гидроцилиндра 7 с помощью каналов 23, 24 и 25, 26. На каналах 25 и 26, соединенных с отверстиями в средней части гидроцилиндра 7, установлены обратные клапаны, и расстояние между ними меньше высоты поршня. Золотник 16 управляется быстродействующим пневмоклапаном 27. Устройство работает следующим образом. В режиме ручного управления и в режиме шлихтовки золотник 16 занимает полол ение, изображенное на чертеже. Гидронасос 13 может перекачивать масло, а тележка перемещаться только в одном направлении - вперед или назад. Возможное направление движения определяется тем, который из клапанов 18 или 19 открыт в данное время. Принудительное движение манипулятора в обратную сторону (откат) исключается из-за невозможности изменения направления потока жидкости. В режиме шлихтовки, когда поковка захватывается бойками пресса при непрерывном движении манипулятора, происходит сдвиг хобота относительно корпуса устройства, а следовательно, и поршня 8 относительно гильзы гидроцилиндра 7. При смещении поршня масло перетекает из одной полости в другую без сопротивления через ненагруженный клапан 20 или 21 (на чертеже изображено положение, соответствующее движению манипулятора влево, клапан 20 открыт, клапан 21 нагружен) . В том же шлихтовочном режиме при возврате хобота в исходное положение под действием пневмоцилиндра 5, масло перетекает в обратном направлении по каналам 23 и 24. При подходе к середине гильзы и при переходе за середину происходит демпфирование, так как канал 25 закрывается, а проход масла по цепи каналов 23-26 невозможен из-за наличия обратного клапа68235 10 15 20 25 30 35 40 45 50 55 60 7 на. По мере закрытия канала 25 объеммасла, не успевающий перетечь по этому каналу, направляется к клапану 21 и перетекает через него под давлением, обусловленным давлением воздуха в полости управления. Это способствует эффективному гашению колебаний. В режиме фиксированной шаговой подачи по сигналу отработки заданного перемещения, золотник 16 переходит во второе положение. При этом гидронасос 13 начинает нагнетать масло в гидроцилиндр 7, площадь поршня которого, ироизводительность насоса и направление движения подобраны таким образом, что движение хобота относительно бойков пресса прекращается. Предварительные клапаны 20 и 21 в это время служат для ограничения скачка давления при торможении и перепускании масла при подходе поршня 8 к упору. Возврат хобота в исходное положение происходит при отключенном золотнике 16, так же как это было описано выше. Предложенное устройство осевого перемещения хобота ковочного манипулятора позволит повысить надежность работы, путем эффективного гашения осевых колебаНИИ в подвеске хобота манипулярота и соответственно повысить производительность ковки. Формула изобретения Устройство осевого перемещения хобота ковочного манипулятора, содержащее пневмоцилиндр установки хобота в среднее положение и гидроцилиндр осевого перемещения, связанный с гидравлической системой управления, состоящей из насоса и распределительной и предохранительной аппаратуры, отличающееся тем, что, с целью повышения надежности путем улучшения демпфирования колебаний в режиме шлихтовки, гидроцилиндр осевого перемещения выполнен с четырьмя отверстиями для подвода рабочей жидкости от распределительной аппаратуры гидросистемы, причем два отверстия расположены в средней части гидроцилиндра, соединены с гидросистемой через обратные клананы и расстояние между ними меньше высоты поршня, а два других - на его концевых участках и соединены между собой двумя магистралями с управляемыми предохранительными клапанами. Источники информации, принятые во внимание при экспертизе 1. Патент США № 3476.276, кл. 214-652, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство осевого перемещения хобота ковочного манипулятора | 1984 |
|
SU1220839A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1976 |
|
SU1038051A1 |
| Устройство для изготовления электрода химического источника тока | 1980 |
|
SU1003204A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1982 |
|
SU1053949A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОДВЕСКОЙ ХОБОТА КОВОЧНОГО МАНИПУЛЯТОРА | 1991 |
|
RU2015783C1 |
| Гидравлическая система управления сельскохозяйственными орудиями | 1988 |
|
SU1538909A2 |
| Гидравлическая система управления гидроподъемным механизмом трактора | 1987 |
|
SU1482551A1 |
| МНОГОСЕКЦИОННЫЙ ГИДРОПРИВОД КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2007 |
|
RU2352518C1 |
| Гидросистема управления сельскохозяйственными орудиями | 1988 |
|
SU1618301A1 |
| Погрузочно-транспортная машина | 1990 |
|
SU1767197A1 |