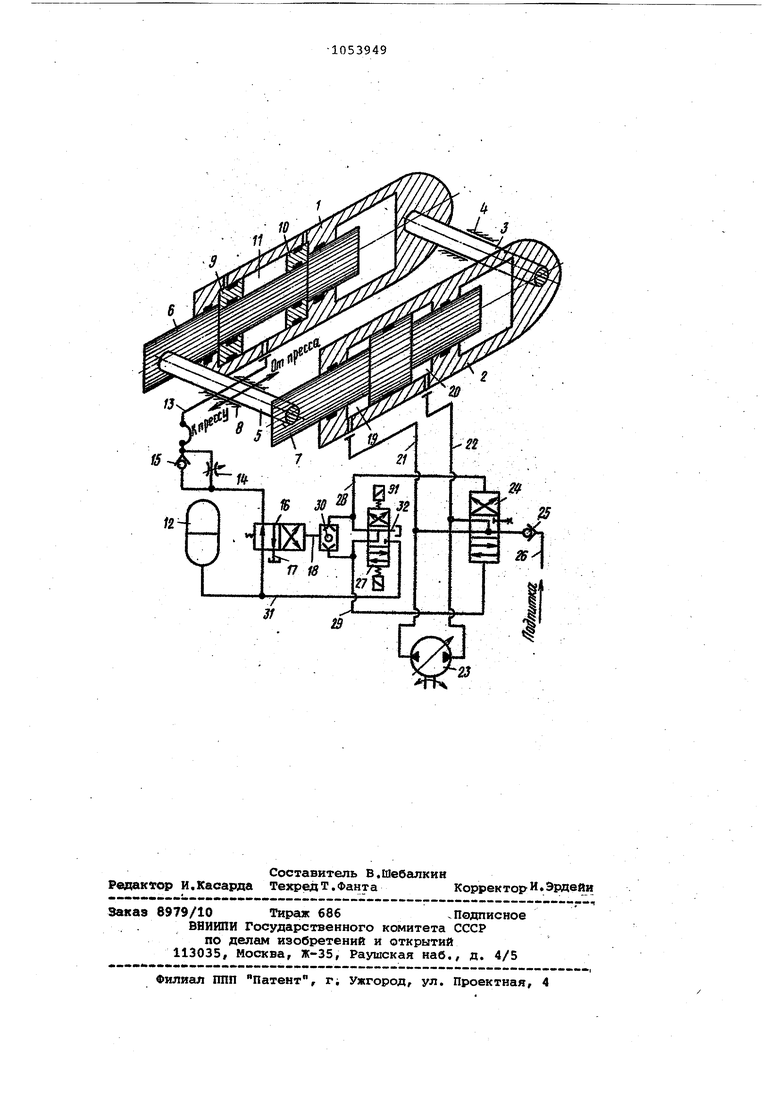
Изобретение относится к вспомогательному оборудованию кузнечнопрессового производства-, а именно к конструкциям ковочных манипуляторов . Известно устройство осевого перемещения хобота ковочного манипуля тора, содержащее электромеханический привод осевого перемещения тележки хобота, и гидравлические системы остановки и возврата хобота 17. Недостатком известного устройств яЕвляется слржность его конструкции. Наиболее близким по технической сущности и достигаемому результату к предлагаемому является устройство осевого перемещения хобота ковочного манипулятора, содержащее шарнирн связанные с тележкой манипулятора и подвеской хобота силовой гидроцилиндр останова хобота, полости которого связаны магистралями с реверсивным насосом и трехпозиционным трехходовым гндрораспределителем, и силовой цилиндр возврата хобота, связанный с пневмогидравлическим аккумулятором.магистралью с установ ленными в ней дросселем и обратным клапаном, а также механизм перемеще ния тележки хобота в виде зубчатого зацепления и приводного редуктора, кинематически связанного с реверсивны насосом 2 J. Недостатком указанного устройств являются повьаяенные энергозатраты на управление процессом останова хо бота, что обусловлено постоянной связью полостей гидроцилиндра возврата с аккумулятором, приводящей к необходимости увеличения силовых и. расходных параметров гидродилиндра останова, который при уттравляемом останове осевого перемещения хобота должен преодолевать наряду с маятниковым моментом подвески хоботамомент от ПОСТОЯННОГО усилия гидроцилиндров возврата, при этом требуется больший типоразмер реверсивного, насоса. Цель изобретения - снижение энер гозатрат при эксплуатации манипулятора. Указанная цель достигается тем, 4to устройство осевого перемещения, хобота ковочного манипулятора, соде жащее шарнирно связанные с тележкой манипулятора и подвеской хобота сил вой гидроцилиндр останова хобота, полости которого связаны магистраля ми с реверсивным насосом и трехпозиционным трехходовым гидрораспределителем, и силовой цилиндр возвра та хобота, связанный с пневмогидравлическим аккумулятором магистрал с установлеяными в ней дросселем и . обратным клапаном, а также механизм перемещения тележки хобота в виде зубчатого зацепления и приводного редуктора, кинематически связанного с реверсивным насосом, снабжено системой подпитки рабочей средой, связанной магистралью с силовьтм гидроцилиндром останова хобота, двухпозиционным,трехходовым гидрораспределителем, установленным в магистрали подвода рабочей среды от пневмогидравлического аккумулятора к силовому гидроцилиндру возврати хобота, а также трехпозиционным электрогидравлическим пилотом управления, связанным с управляемыми полостями трехшозиционного трехходового гидрораспределителя и с пневмогидравлическим аккумулятором, при этом управляемая полость двухпозиционного трехходового гидрораспределителя связана с управляемыми полостями трехпозиционного трехходового гидрораспределителя посредством логического элемента ИЛИ, а трехпозиционный трехходовый гидрораспредедитель установлен в магистрали подпитки силово го гидроцилиндра останова хобота. На чертеже изображена схема устройства . Устройство осевого перемещения хобота содержит поршневые гидроцилиндры возврата 1 и останова 2 хобота, которые с помощью оси 3 шарнирно закреплены относительно тележки 4 манипулятора, а осью 5. их штоки 6 и 7 шарнирно связаны с подвеской 8 хобота манипулятора. На центральном участке штока б гидроцилиндра 1 установлены с возможностью осевого перемещения поршни 9 и 10. Межпоршневая полость 11 связана с пневмогидравлическим аккумулятором 12 магистралью 13, на которой установлены дроссель 14 с обратным клапаном 15 и двухпозиционньай трехходовой гидрораспределитель 16, присоединенный также к сливной магистрали 17 и магистрали 18 управления. Полости 19 и 20 поршневого гидроцилиндра 2 магистралями 21 и 22 связаны с соответствующими выходами реверсивного насоса 23, кинематически связанного с редуктором перемещения тележки и трехпозиционного трехходового гидрораспределителя 24, сообщенного через обратный клапан 25 с магистралью 26 подпитки. Гидрораспределитель 24 в свою очередь с трехпозиционвым электрогидравлическим пилотом 27 управления магистралями 28 и 29, дополнительно соединенными через элемент ИЛИ 30 с магистралью 18 управления гидрораспределителем 16. Магистрали 31 и 32 связывают пилот 27 управления с гидроаккумулятором 12 и сливом. Устройство осевого перемещения ,хобота ковочного манипулятора piiuoTaeT следующим образом. При ручном управлении осевым перемещением хобота с поковкой не ставится задача ее точног шагового перемещения, обе полос.ти 19 и 20 гидроцилиндра останова через магистрали 21 к 22 к гидрораспределитель 24, находящийся в нейтральном положении, сообщены между собой и находятся под дав-- лением системы подпитки. В этом сл чае при останове хобота внешними силами, например при зажатии поковки бойками пресса, перемещающая тележка 4 через ось 3 смещает гидроцилиндр 1 возврата с поршнем 10 Относительно неподвижного штока б, а гидроцилиндр 2 - относительно не подвижного штока 7 влево. Жидкост из полости 20 свободно переливается в полость 19, а из полости 11 жидкость ОУДет вытесняться через магистраль 13, даюссель 14 с обрат tuiM клапаном 15 и гидрораспределитеп - 16, занимающий правое положение благодаря связи магистрали 18 со сливом, в гидр-одневматический аккумулятор 12. После освобождения хобота с поковкой внешними силами поршень 9 досылает шток б и связанную с ни через ось 5 подвеску хобота 6 до упора в передний бурт гидроцилиндра 1, восстанавливая нейтральное положение подвески хобота относительно тележки манипулятора. Аналогичным образом работает ги росистема при движении манипул|ятор от пресса. В случае управляемого останова хобота с поковкой, необходимого дл точной реализации заданного шага о вой подачи, например при работе с программным управлением, задача после выдачи команды на останов состоит в смещении хобота с поковкой усилием гидроцилиндра 2 остано ва относительно тележки 4 со скоростью, равной, но противоположно направленной скорости тележки. Это достигается включением соответствующего электромагнита Э1 и Э2, электрогидравлического пилота 27 управления в зависимости от напра ления движения тележки манипулятора - к прессу или от пресса), а та же. соответствующим подбором геомет рического объема реверсивного насЪса 23, эффективной площади поршневых полостей гидроцилиндра 2 останова, кинематической увязкой передаточного числа редуктора между валами привода звездочки цевочной рейки и реверсивного насоса. Так, при движении тележки манипулятора к прессу, команда на упр вляет й останов осуществляется включением электромагнита Э2 электрогидравлического пилота 27 управления. При этом гидросистема обеспечивает следующие функции; благодаря переключению гидрораспределителя 24 в верхнее положение полость 20 гидроцилиндра останова становится всасывающей для насоса 23, работающего в режиме дозатора расхода, а полость 19 - нагнетательной, вследствие чего шток 7 отклоняет подвеску в направлении от пресса со скоростью, равной скорости движения тележки; давление в магистрали 29 прижимает шарик логического элемента ИЛИ 30 к верхнему седлу и, действуя на управляемый торец гидрораспределителя 16, перемещает его . в левое положение, благодаря чему полость 11 гидроцилиндра 1 возврата разгружается на слив и. шток 7 гидроцилиндра 2 останова преодолевает при смещении подвески хобота лишь ее маятниковый момент, что существенно уменьшает потребную эффективную площадь гищ оцилиндра останова. Возврат подвески хобота в нейтральное положение (догон тележки ). происходит регулируемой дросселем 14 скоростью после отключения электрома,гнита Э2, переключения пилота 27 и гидрораспределителя 24 в среднее положение, гидрораспределителя 16 в правое положение и сообщения полости 11 гидроцилиндра 1 возврата с гидропневматическим аккумулятором 12. . Ансшогичным образом включением электромагнита Э1 обеспечивается управляемый останов хобота с поковкой при движении тележки манипулятора от пресса, при этом шарик т ерметизирует. нижнее седло логического элемента ИЛИ 30.. По сравнению с прототипом использование предлагаемого изобретения позволяет снизить энергозатраты при ;эксплуатации манипулятора.
w
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство осевого перемещения хобота ковочного манипулятора | 1976 |
|
SU1038051A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1984 |
|
SU1220839A1 |
| Привод продольного перемещения хобота ковочного манипулятора | 1981 |
|
SU997945A1 |
| Привод вертикального перемещения хобота ковочного манипулятора | 1980 |
|
SU912390A1 |
| Привод продольного перемещения тележки и хобота ковочного манипулятора | 1980 |
|
SU946775A1 |
| Передняя подвеска хобота ковочногоМАНипуляТОРА | 1979 |
|
SU816656A1 |
| Хобот ковочного манипулятора | 1977 |
|
SU725773A1 |
| Устройство вертикальной амортизации хобота ковочного манипулятора | 1987 |
|
SU1516216A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1971 |
|
SU682317A1 |
| Устройство вертикальной амортизации хобота манипулятора | 1976 |
|
SU607634A1 |
УСТРОЙСТВО ОСЕВОГО ПЕРЕИЕ- : ЩЕНИЯ ХОБОТА КОВОЧНОГО МАН ШУЛЯТОРА, содержащее шарнирно свя9ав11ые с - . . теЛежкой манипулятора и подвеской хобота силовой гидроцилиндр останова хоёота, полости которого связаны магистралями с реверсигньш насосом и трехпозиционны трехходовым гидрораспределителем, и силовой гидроцилиндр возврата хобота, связанный ,с пневмогидравлическим аккзлмулятором магистралью с установленными в «ей дросселем и обратным клапаном, а : также механизмом Перемещения тележки I хобота в виде зубчатого зацепления и приводногр редуктора, кинематически связанного с реверсивным насосом, о т л и ч а ю Щ|е ё с я тем, ЧТО, с целью снижения энергозатрат, оно снабжено системой подпитки рабочей средой, связанной магистралью с силовым гидроцилиндрсш останова хобота, двухпозиционным трехходовым гидрораспределителем, установленным в магистрали подвода рабочей среды от пневмогидравлического ак- . кумулятора к силов «у гидроцилиндру возврата хобота, а также трехпозиционным электрогидравлическим пилотом управления, связанным с управляе1мыми полостями трехпозиционного трехходового гидрораспределиko теля и с пневмогидравлическим аккумулятором, при этсм управляемая полость двухпозициониого трехходового гидрораспределителя связана с управляемыми полостями трехпоэиционного треххЪдового гидрораспределителя посредством логического элемента ИЛИ, а трехпозиционный трехходовой гидрораспределитель устаICn новлен в магистрали подпй1ки силовооо го гидроцилиндра останова хобота. ;о 4 СО
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
