1
Изобретение относится к электроприводам с бесконтактными электродвигателями постоянного тока.
Известны бесконтактные электродвигатели постоянного тока, содержащие синхронную машину, секции якорной обмотки которой подключены к источнику постоянного тока через силовые полупроводниковые ключи коммутатора, управляемого датчиком положения ротора 1.
Ближайшим к изобретению является бесконтактный электродвигатель постоянного тока, содержащий синхронную мащину, секции якорной обмотки которой подключены к источнику постоянного тока через силовые полупроводниковые ключи коммутатора, датчик положения ротора, выявитель рассогласования, первой и второй входы которого соединены соответственно с датчиком скорости и задатчиком скорости, а выход- с входом многоканального реле, нормально замкнутые цепи которого включены между выходом датчика положения ротора и входом силового полупроводникового ключа 2.
Система стабилизации основана на регулировании среднего напряжения питания двигателя за период коммутации. Недостатком таких систем стабилизации скорости является то, что приводы с различными моментами инерции по разному реагируют на выключение напряжения питания. Например, приводу с большим моментом инерции, кроме выключения напряжения для снижения скорости, необходимо еще активное торможение, иначе время переходного процесса будет значительным, и наоборот привод с малым моментом инерции очень чувствителен к выключению напряжения,
вследствие чего возникает большая величина перерегулирования, и нередко в системе возникают до.тгозатухающие качания. Чтобы избежать этих недостатков приходится вводить многочисленные дополнительные устройства, что сильно усложняет схему и тем самым снижает надежность коммутатора и привода в целом.
Целью изобретения является улучшение переходного процесса стабилизации.
Поставленная цель достигается тем, что регулирование скорости ведется не по напряжению, а изменением внутренней структуры синхронной машины, для чего последняя снабжена дополнительными секциями
якорной обмотки, каждая из которых включена параллельно силовому полупроводниковому ключу через последовательно соединенный с ней дополнительный ключ, вход которого соединен с одноименным выходом
датчика положения ротора через нормальuo разомкнутые цепи многоканального реле.
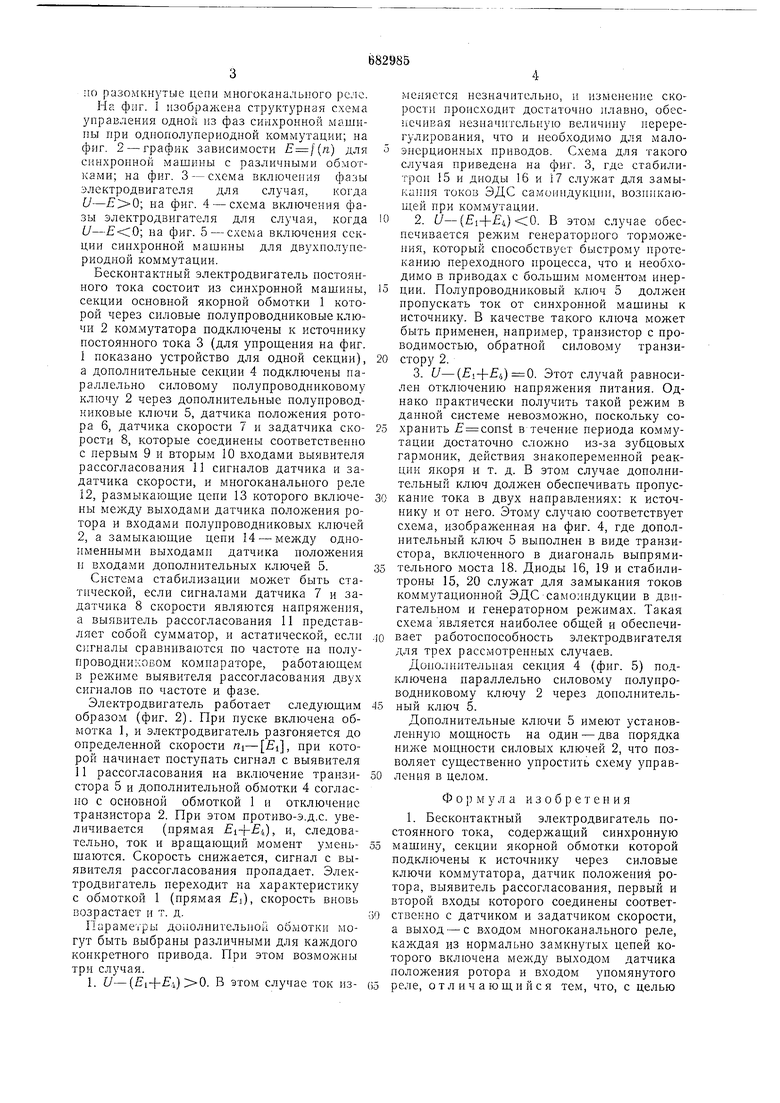
На фнг. 1 изображена структурная схема управления одной из фаз синхронной машины при однополупериодной коммутации; на фиг. 2 - график зависимости («) для синхронной машины с различными обмотками; на фиг. 3 - схема включения фазы электродвигателя для случая, когда на фиг. 4 - схема включения фазы электродвигателя для случая, когда на фиг. 5 - схема включения секции синхронной машины для двухполунериодной коммутации.
Бесконтактный электродвигатель постоянного тока состоит из синхронной машины, секции основной якорной обмотки 1 которой через силовые полупроводниковые ключи 2 ко.ммутатора подключены к источнику постоянного тока 3 (для упрощения на фиг.
Iпоказано устройство для одной секции), а дополнительные секции 4 подключены параллельно силовому полупроводниковому ключу 2 через дополнительные полупроводниковые ключи 5, датчика положения ротора 6, датчика скорости 7 и задатчика скорости 8, которые соединены соответственЕЮ
с первым 9 и вторым 10 входами выявителя раесогласования 11 сигналов датчика и задатчика скорости, и многоканального реле 12, размыкающие цепи 13 которого включены между выходами датчика положения ротора и входами полупроводниковых ключей 2, а замыкающие цепи 14 - между одноименными выходами датчика положения н входами дополнительных ключей 5.
Система стабилизации может быть статической, если сигналами датчика 7 и задатчика 8 скорости являются напряжения, а выявитель рассогласования И представляет собой сумматор, и астатической, если сигналы сравниваются по частоте на полупроводниковом компараторе, работающем в ре/киме выявителя рассогласования двух сигналов по частоте и фазе.
Электродвигатель работает следующим образом (фиг. 2). При пуске включена обмотка 1, и электродвигатель разгоняется до определенной скорости , при которой начинает поступать сигнал с выявителя
I1рассогласования на включение транзистора 5 и дополнительной обмотки 4 согласно с основной обмоткой 1 и отключение транзистора 2. При этом противо-э.д.с. увеличивается (прямая fi-f-fu), и, следовательно, ток и вращающий момент уменьшаются. Скорость снижается, сигнал с выявителя рассогласования пропадает. Электродвигатель переходит на характеристику
с обмоткой 1 (прямая EI), скорость вновь возрастает и т. д.
Параметры дополнительной обмотки могут быть выбраны различными для каждого конкретного привода. При этом возможны три случая.
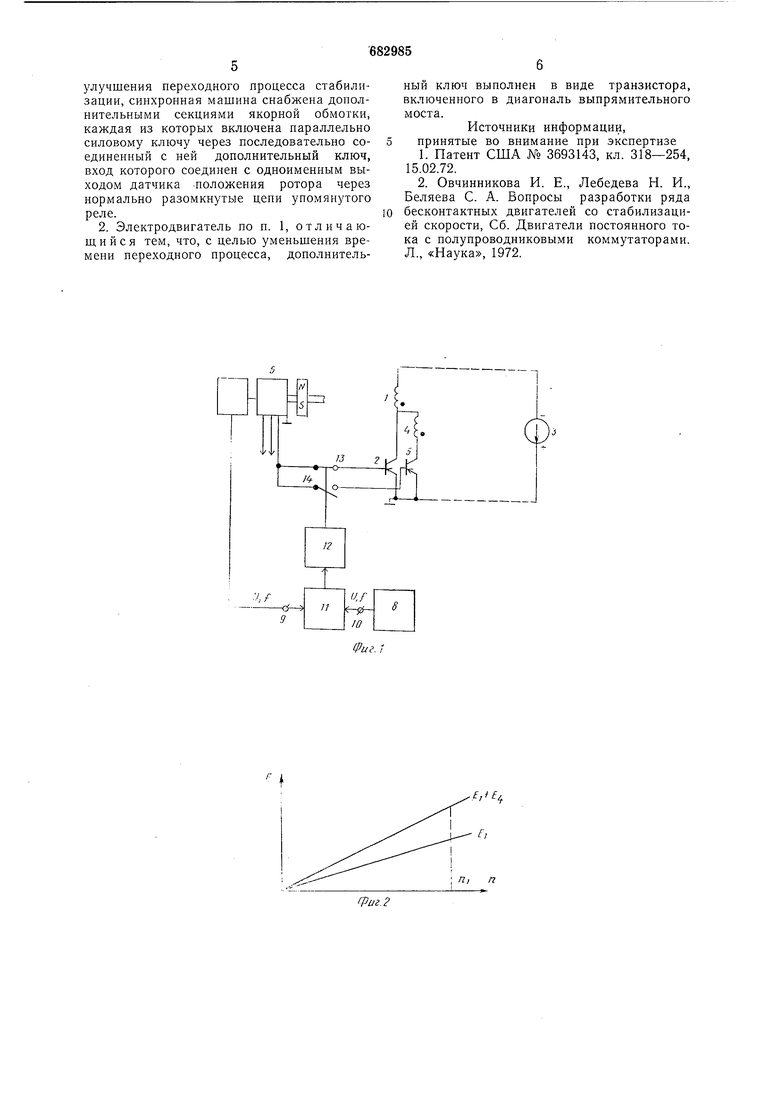
1. и-()0. В этом случае ток изменяется незначительно, и изменение скорости происходит достаточно плавно, обеспечивая незначительную величину перерегулирования, что и необходимо для малоэнерционных приводов. Схема для такого случая приведена на фиг. 3, где стабилитрон 15 и диоды 16 и 17 служат для замыка ия токов ЭДС самоиндукцнн, возипкающей при коммутации.
2.и-(i+.i) 0. В этом случае обеепечивается режим генераторного торможения, который снособствует быстрому протеканию переходного процесса, что и необходимо в приводах с большим моментом инерции. Полупроводниковый ключ 5 должен пропускать ток от синхронной машины к источнику. В качестве такого ключа может быть применен, например, транзистор с проводимостью, обратной силовому транзистору 2.
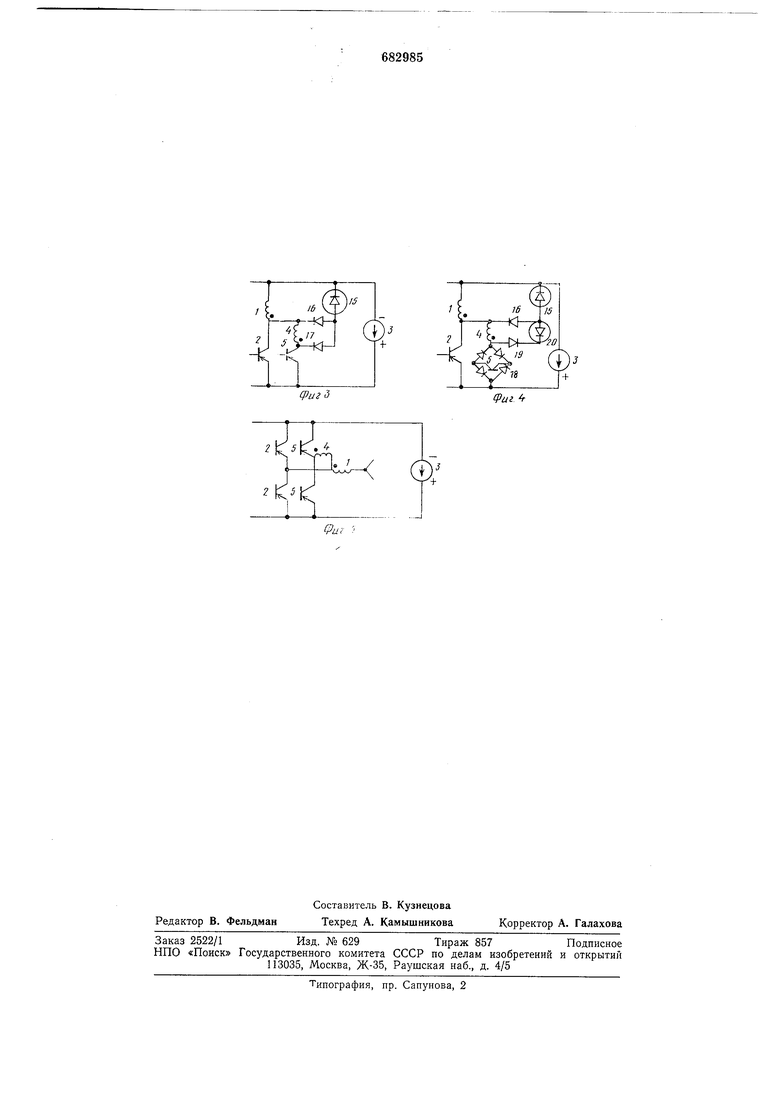
3.и-(Ei-}-Ei.,)Q. Этот случай равносилен отключению напряжения питания. Однако практически получить такой режим в данной системе невозможно, поскольку сохранить const в течение периода коммутации достаточно слол4но из-за зубцовых гармоник, действия знакопеременной реакции якоря и т. д. В этом случае дополнительный ключ должен обеспечивать пропускание тока в двух направлениях: к источнику и от него. Этому случаю соответствует схема, изображенная на фиг. 4, где дополнительный ключ 5 выполнен в виде транзистора, включенного в диагональ выпрямительного моста 18. Диоды 16, 19 и стабилитроны 15, 20 служат для замыкания токов коммутационной ЭДС самоиндукции в двигательном и генераторном режимах. Такая схема является наиболее общей и обеспечивает работоспособность электродвигателя для трех рассмотренных случаев.
Дополнительная секция 4 (фиг. 5) подключена параллельно силовому полупроводниковому ключу 2 через дополнительный ключ 5.
Дополнительные ключи 5 имеют установленную мощность на один - два порядка ниже мощности силовых ключей 2, что позволяет существенно упростить схему управления в целом.
Формула изобретения
1. Бесконтактный электродвигатель постоянного тока, содержащий синхронную машину, секции якорной обмотки которой подключены к источнику через силовые ключи коммутатора, датчик положения ротора, выявитель рассогласования, первый и второй входы которого соединены соответственно с датчиком и задатчиком скорости, а выход - с входом многоканального реле, каждая из нормально замкнутых цепей которого включена между выходом датчика положения ротора и входом упомянутого реле, отличающийся тем, что, с целью
улучшения переходного процесса стабилизации, синхронная машина снабжена дополнительными секциями якорной обмотки, каждая из которых включена параллельно силовому ключу через последовательно соединенный с ней дополнительный ключ, вход которого соединен с одноименным выходом датчика -положения ротора через нормально разомкнутые цепи упомянутого реле.
2. Электродвигатель по п. 1, отличаюшийся тем, что, с целью уменьшения времени переходного процесса, дополнительный ключ выполнен в виде транзистора, включенного в диагональ выпрямительного моста.
Источники информации, принятые во внимание при экспертизе
1.Патент США № 3693143, кл. 318-254, 15.02.72.
2.Овчинникова И. Е., Лебедева Н. И., Беляева С. А. Вопросы разработки ряда бесконтактных двигателей со стабилизацией скорости. Сб. Двигатели постоянного тока с полупроводниковыми коммутаторами. Л., «Наука, 1972.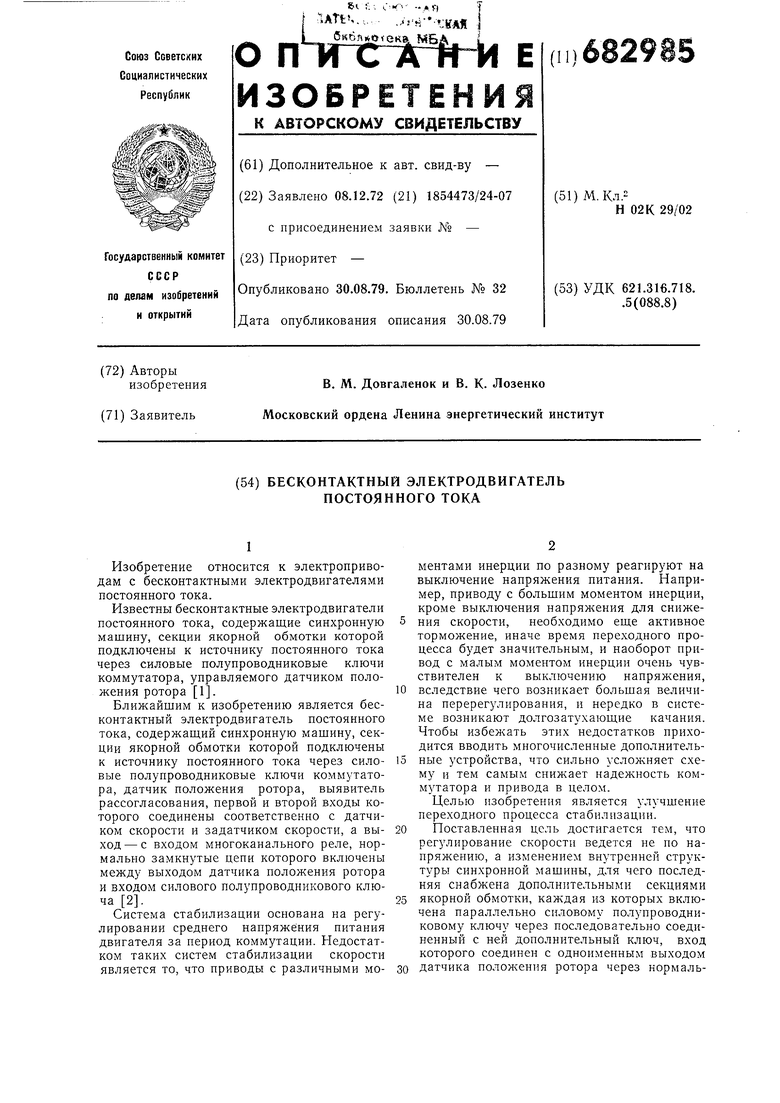
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1981 |
|
SU1001420A1 |
| Многодвигательный электропривод с бесконтактными электродвигателями постоянного тока | 1973 |
|
SU520684A2 |
| Стабилизированный вентильный электродвигатель | 1981 |
|
SU1007160A1 |
| Многодвигательный электропривод | 1978 |
|
SU785938A2 |
| Устройство для управления бесконтактным электродвигателем постоянного тока | 1981 |
|
SU1020951A1 |
| Бесконтактный двигатель постоянного тока | 1976 |
|
SU653693A2 |
| Многодвигательный электропривод | 1977 |
|
SU692050A1 |
| РЕГУЛИРУЕМЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2068611C1 |
| Вентильный электропривод | 1986 |
|
SU1390764A1 |
| Бесконтактный электродвигатель постоянного тока | 1974 |
|
SU600669A2 |
ф
