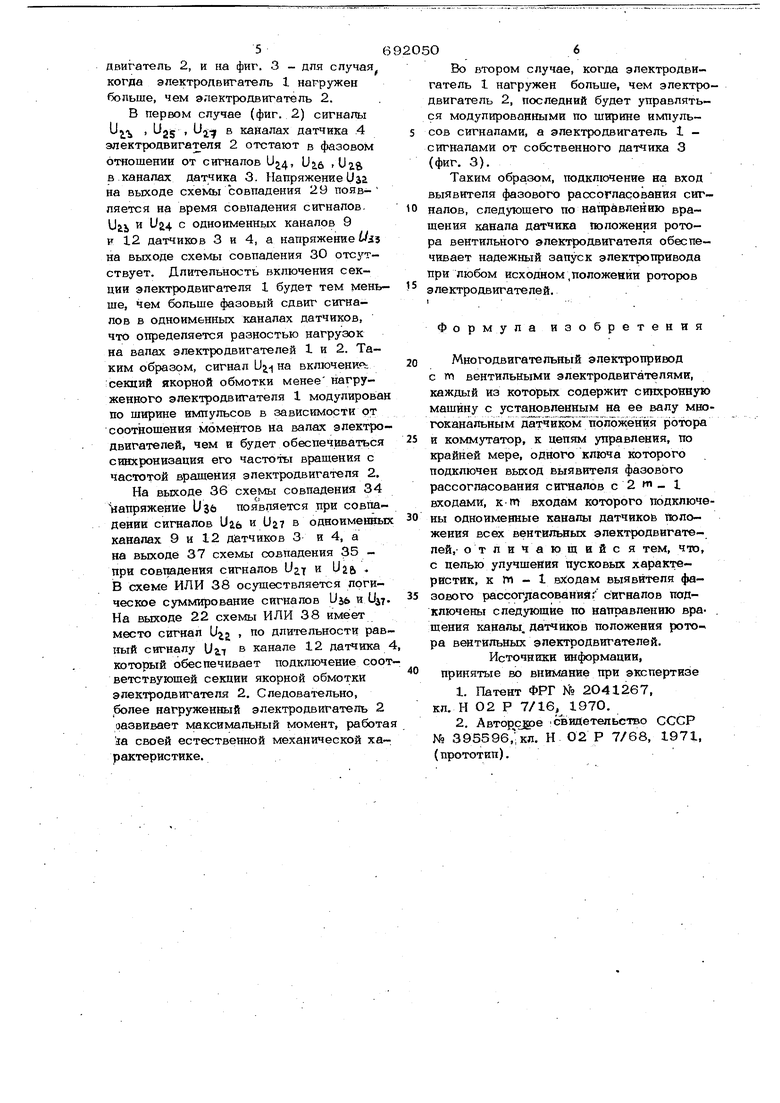
(54) МНОЮДВИГАТЕЛЬНЫЙ ЭЛЕКТГОПРИЮД 36 вого рассогласования cHrrfSiiOB с 2 т входами, к И1 входам которого подключе ны одноименные каналы датчиков попож ния ротора всех вентильных электродвигателей, а дополнительно к т- 1 вхбдам подключеньг следующие по направле нию вращения каналы датчиков положения ротора вентильных электродвигателей. Сущность изобретения поясняется чертежами. На фиг. 1 изображена блок- схема двухдвигательйъго эпейтрьпрй зода;. на фиг. 2 и 3 - диаграммы напря.жения в узлах блок-схема электропривода. Электропривод (фиг. 1) содержит дв вентильных.электродвигателя I и 2, в состав каждого из ,ноторьгх входят син хронные машины с секциями обмотки якоря (на чертеже не показаны) и уста новленными на их валах многоканальными датчиками 3 и 4 положения ротора, коммутаторы 5 и 6 и выявители 7 и 8 фазового рассогласования сигналов, В данном конкретном случае каждый датчик 3 и 4 содержит по три канала (чувствительных элемента) 9, 10, 11 И 12, 13, 14 соответственно, а кажды коммутатор 5 и 6 - по три ключа 15, 16, 17 и 18, 19, 20, соответственно. Ключи подключены к секциям обмоток якоря синхронаых машин (на чертеже не показаны). К цепи управления, по крайней мере, одного ключа в каждом коммутаторе, например к ключам 15 и 1б, подключены выходы 21 и 22 выя вителей 7 и 8, каждый из которых вмёёт по 2ni l, т.е. по три , входа 23, 24, 25 и 26, 27, 28 соответстве но. К m , т.е. к двум входам, наприме к входам 23 и 24, выявителя 7 подклю чень одноименные каналы 9 и 12 датчиков 3 и 4 вентильньсйэлектродвигате лей, а к m-1, т.е. к одному входу, на пример 25, подключен следующий по направлению вращения канал 13 датчика 4 вентильного электродвигателя 2, Подключение к входам выявителя 8 каналов датчиков произведено аналогичным образом. В данном конкретном случае выявитель 7.фазового раосогпасования сигналов сбдерЖат, две двухвходовые схемы совпадения 29 и 30 и одну; логическую схему ИЛИ 31. Два входа двух схем со падения, 29 и 30 объединены и в сово хупности с двумя другими входами образуют три входа выявителя 7 4 азового рассогласования сиппюп. Выходы 32 и 33 схем совпадения 9 и 30 подключены к входам схеьпл ЛИ 31, вькод которой являетс;я выхоом выявителя 7. Выявитель 8 фазового рассогласования игналов выполнен аналогично и содержит хемы совпадения 34,35, выходы котоых 36 и 37 подключены к входам схеы ИЛИ 38. На фиг. 2 и 3 изображены напряженные в уйлах схемы соответствующих позиций. В исходном состоянии при включении электропривода сигналы имеют место, например, в каналах 9 и 13 датчика 3 и 4, т.е. существуют сигналы U, , и jg, на входах 24, 25 и 26 выявителей 7 и 8. В этой комбинации будет иметь место сигналить на выходе 33 схемы совпадения 30, который пройдя схему ИЛИ 31 поступит в цепь управления ключа 15. В результате последний подключит к источнику питания соответствующую секцию якорной обмотки синхронной машины, создавая пусковой момент. Ротор электродвигателя 1 начнет вращаться. На выходе 22 1выявателя 8 сигнал Ujj будет отсутствовать и ротор электродвигателя 2 будет оставаться в исходном состоянии. В дальнейшем, при достижении согласованного положения роторов электродвигателей 1 и 2, начнет вращаться и ротор электродвигателя 2, так как сигналы на 1ключение соответствующих секций будут поступать через схемы совпадения, подключенные к одноименным каналам датчиков 3 и 4 положения роторов. Поскольку каждый канал 9, 10, 11 датчика 3 объединен парами посредством схем совпадения с каждым, каналом 12, 13, 14 датчика 4, то при любом положении роторов в исходном состоянии будет иметь место включение секции якорной обмотки того и другого электродвигателя, соответствующее сигналу по крайней мере, одного из каналов 9 j 14 датчиков 2 и 4. Электропривод начнет вращение при любом исходном положении роторов электродвигателей и всегда в одном, и том же направлении. Дальнейшая работа электропривода происходит в соответствии с диаграммами напряжений, представленными на фиг, 2 для случая, когда электродвигатель 1 нагружен меньше, чем электродвигатель 2, и на фиг. 3 - для случая когда электродвигатель 1 нагружен больше, чем электродвигатель 2.
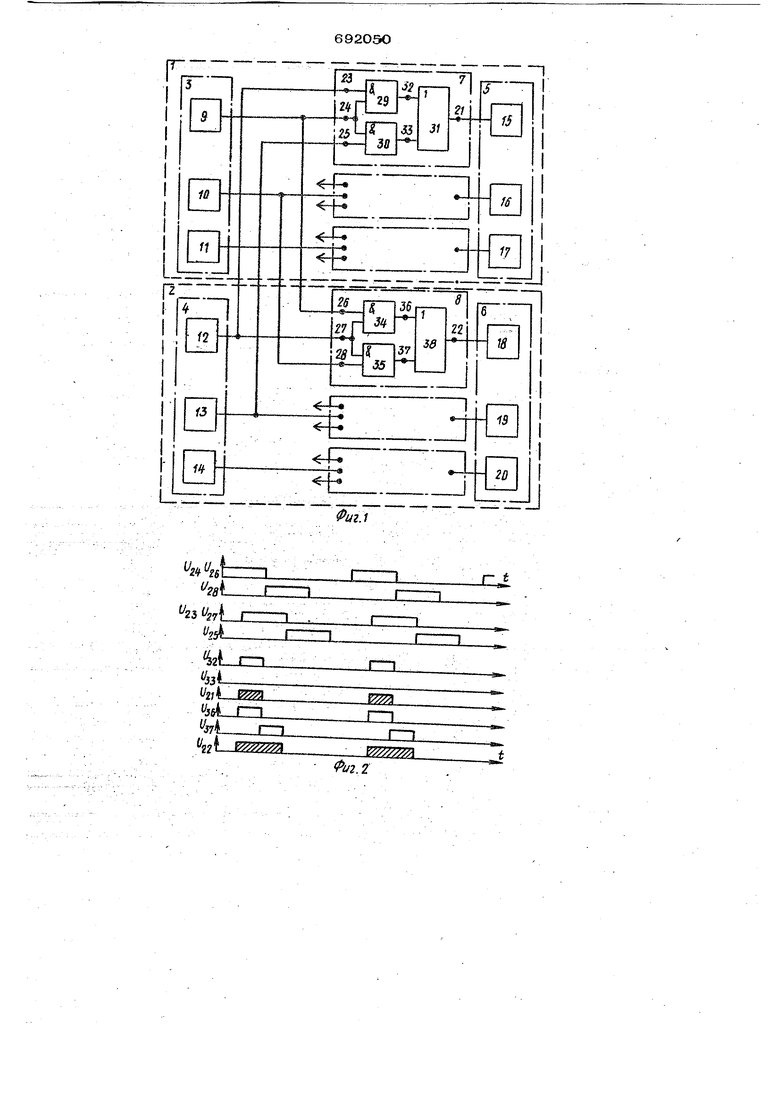
В первом случае (фиг. 2) сигналы -IT, zs i каналах датчика .4
электродвигателя 2 отстают в фазовом отношении от сигналов U, . в каналах 3. Напряжение Маа на вькоде схемы совпадения 29 появ- ляется на время совпадения сигналов.
Uij, и с одноименных каналов 9 V 12 датчиков 3 и 4, а напряжение Usy на выходе схемы совпадения 30 отсутствует. Длительность включения секции электродвигателя 1 будет тем меньше, Чем больше фазовый сдвиг сигналов в одноименных каналах датчиков, что определяется разностью нагрузок на валах электродвигателей 1 и 2. Таким образом, сигнал U на включени. :секций якорной обмотки менее нагруженного электродвигателя 1 модулирова по ширине импульсов в зависимости от соотношения моментов на валах электродвигателей, чем и будет обеспечиваться синхронизация его частоты вращения с частотой вращения электродвигателя 2.
На выходе 36 совпадения 34 Напряжение Ujb появляется при совпадении сигналов Uib и Ujv в одноименны каналах 9 и 12 датчиков 3 и 4, а на выходе 37 схемы совпадения 35 при совпадения сигналов и U26 . В схеме ИЛИ 38 осуществляется логическое суммирование сигналов Ujb и 1)37 На выходе 22 схемы ИЛИ 38 имеет место сигнал , по длительности равный сигналу L/iT в канале 12 датчика который обеспечивает подключение сооветствующей секции якорной обмотки электродвигателя 2, Следовательно, более нагруженный электродвигатель 2 развивает максимальный момент, работа на своей естественной механической характеристике.
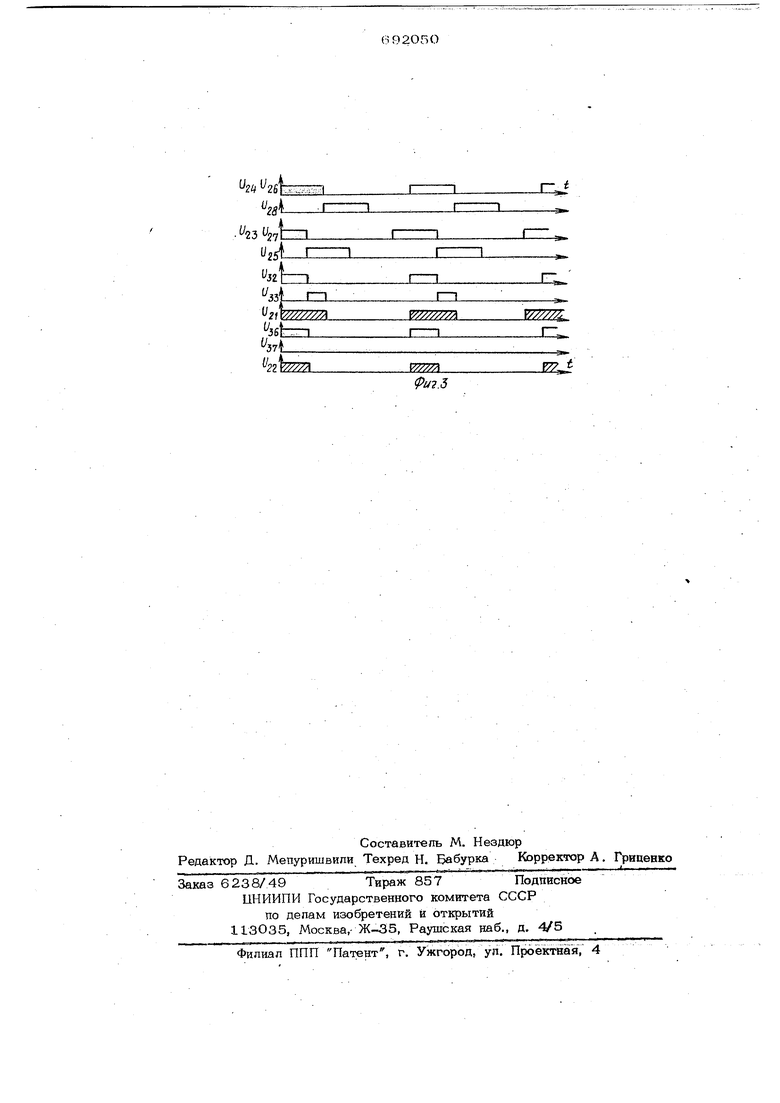
Во втором случае, когда электродвигатель 1 нагружен больше, чем электродвигатель 2, последний будет управляться модулированными по ширине импульсов сигналами, а электродвигатель 1 сигналами от собственного датчика 3 (фиг. 3).
Таким образом, подключение ва вход выявителя фазового рассогласования сигналов, следующего по направлению вращения канала датчика положения ротора вентильного электродвигателя обеспечивает надежный запуск электропривода при любом исходном .положении роторов
электродвигателей.
(--
Формула изобретения
Многодвигательный электропривод с гп вентильными электродвигателями, каждый из KOTopbix содержит синхронную машину с установленным на ее валу многоканальным дэтчиком положения ротора и коммутатор, к цепям управления, по крайней мере, одного ключа которого подключен выход выявителя фазового рассогласования сигналов с 2 - 1 входами, к m входам которого подключены одноименные каналы датчиков положения всех вентильных электродвигателей,- отличающийся тем, что, с целью улучшения пусковых характеристик, к m - 1 выявителя фазового paccorjiaсований Г сигналов подключены следующие по направлению вращения каналы, датчиков положения ротора вентильных электродвигателей.
Источники информации, принятые во внимание при экспертизе
1.Патент ФРГ fc 2О41267, кл. Н 02 Р 7/16, 1970.
2.Авторс|юе .свидетельство СССР N9 395596,; кл. И 02 Р 7/68, 1971, (прототип).
м
% %%1
а,
. 4t
%4 %t/jfi4
(/2,f

| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1978 |
|
SU785938A2 |
| Многодвигательный электропривод | 1981 |
|
SU1001420A1 |
| Многодвигательный электропривод | 1978 |
|
SU942232A1 |
| Многодвигательный электропривод | 1978 |
|
SU974541A2 |
| Многодвигательный электропривод с бесконтактными электродвигателями постоянного тока | 1973 |
|
SU520684A2 |
| Многодвигательный электропривод | 1981 |
|
SU1023613A2 |
| Бесконтактный электродвигатель постоянного тока | 1972 |
|
SU682985A1 |
| Вентильный электродвигатель | 1984 |
|
SU1241364A1 |
| Способ управления многодвигательным электроприводом | 1978 |
|
SU769696A1 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1007162A1 |
ggfe
f/7
У////л
