Изобретение относится к электротехнике, в частности к синхронизированному электроприводу, содержащему несколько электродвигателей,и может найти применение для построения систем синхронного вращения нескольких механически несвязанных валов в широком диапазоне изменения нагрузки.
Известен электропривод, содержащий несколько синхронных машин с дат :чиками положения ротора на каждой обсшй полупроводниковый коммутатор и выявитель рассогласования сигналов датчиков положения ротора по частоте и фазе С.
Синхронное вращение механически несвязанных валов обеспечивается за счет выявления электродвигателя, ротор которогоявляется отстающим по углу поворота от других электродвигателей , и управления общим полупроводниковым коммутатором по сигналам датчика положения ротора этого .электродвигателя.
Недостатками такого электропривода являются низкие энергетические показатели электропривода при различных величинах моментов нагрузки на электродвигателях. Это объясняется тем, что синхронизирующий момент в электроприводе обеспечивается за счет поздней коммутации менее нагруженных электродвигателей, что. сопряжено с ухудшением энергетических показателей. .
Известен многодвигательный электропривод с синхронно вращающимися электродвигателями, содержащими каждый синхронную машину с датчиком
10 положения ротора и коммутатор С2 J.
Синхронное вращение механически несвязанных валов электродвигателей обеспечивается за счет того, что многоканальные датчики положения ро15тора связаны,по части каналов с цепью управления, по крайней мере, одного ключа полупроводникового коммутаторй через функциональный преобразователь сигнала в сигнал с задержанным
20 передним (|фонтом на интервал времени, соответствующий углу рассогласования между роторсял данного электродвигателя и ротором электродвигателя, отстающего по углу поворота.
25
Недостатком указанного электропривода является значительная величи на угла-пространственного рассогласввания между синхронно вращающимися
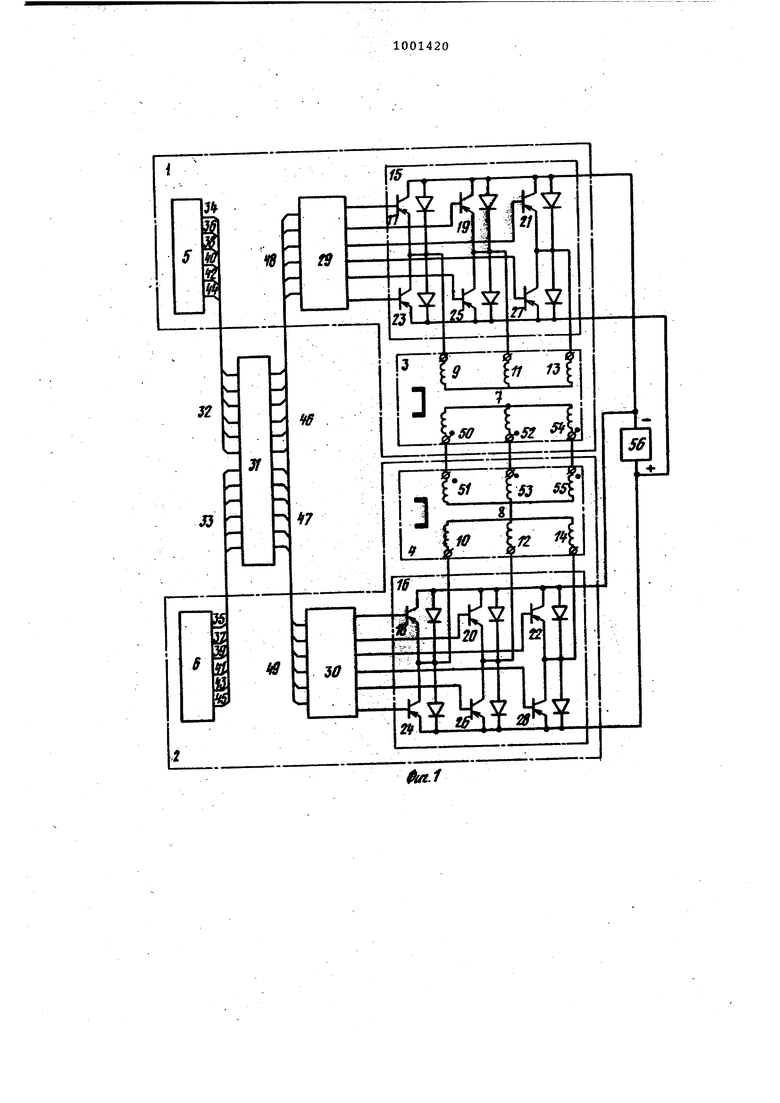
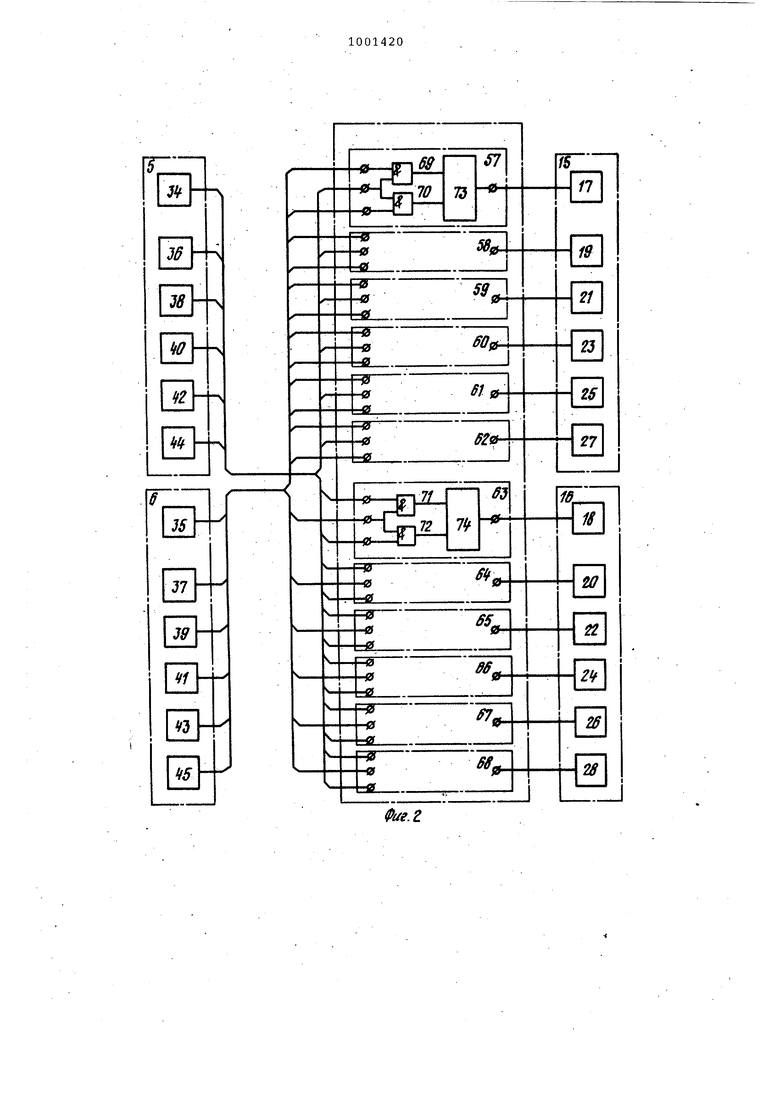
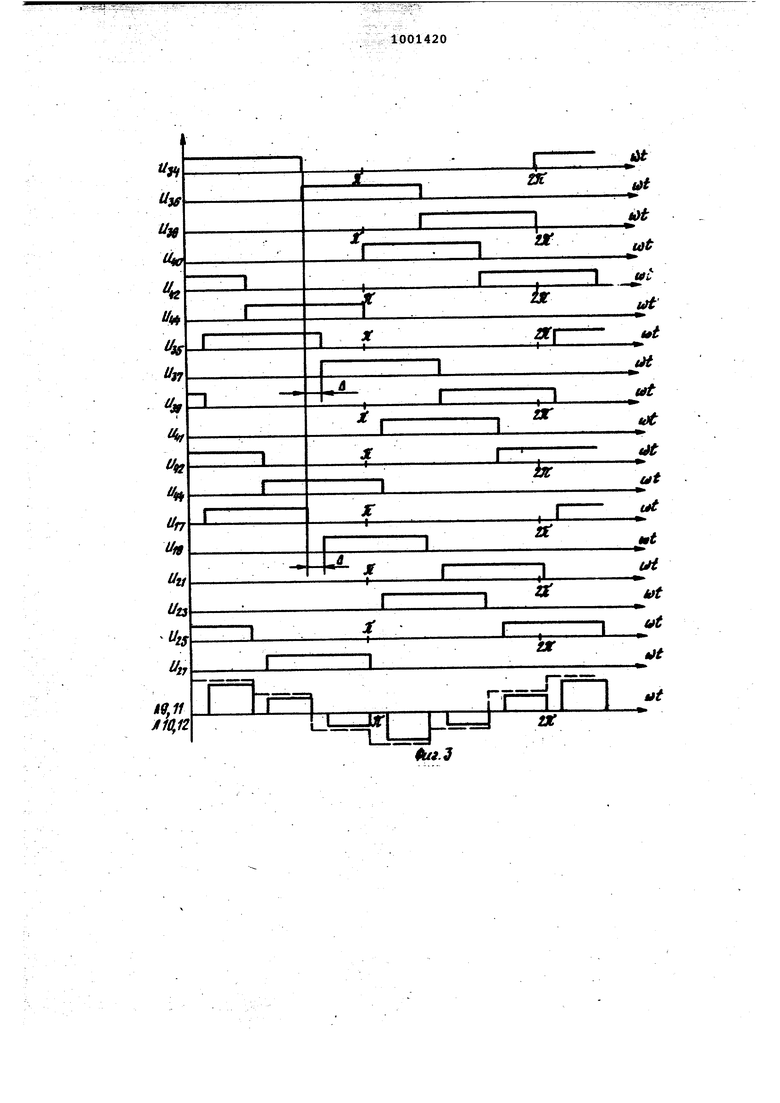
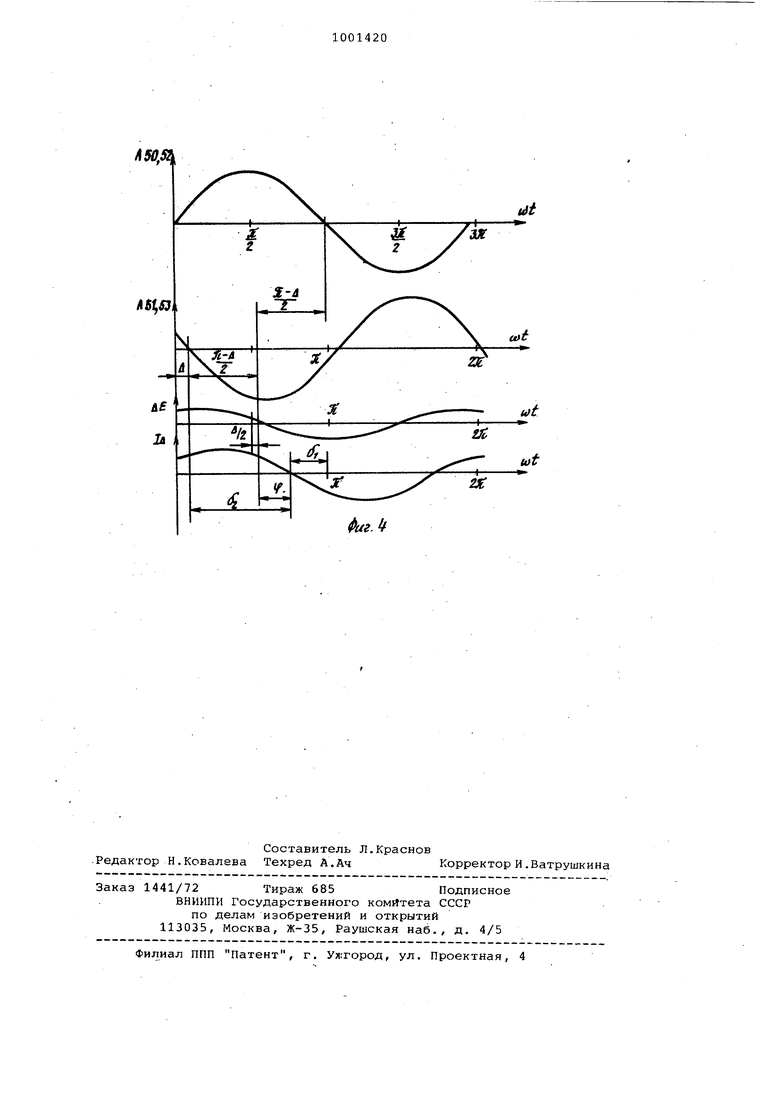
30 роторами электродвигателей. Наиболее близким к предлагаемому является электропривод, содержащий, по крайней мере, два электродвигателя , каждый из которых выполнен на базе синхронной машины q установ ленным на ее валу многоканальным датчиком положения ротора и размещенной на статоре /Щ-секционной яко ной обмоткой, секцииякорной обмотк подключены- к выходам полупроводникового коммутатора, к цепям управления ключей которого подключен широтно-импульсный регулятор, и изме ритель пространственного рассогласо-вания синхронно вращающихся механически несвязанных роторов электродвигателей, входы которого-;; 5вязаны с каналами датчиков положения ротор а выходы - с управляющими входами широтно-импульсного регулятора . Формы выполнения широтно-импульс ного регулятора и измерителя пространственного рассогласования -роторов могут быть различны. В частност эти. функциональные блоки могут быть 1конструктивно объединены и выполне ны В виде функционального преобразо .вателя каждого сигн.ала датчика-поло жения ротора в последовательность импульс.ов, следующих друг за другом с интервалом времени, соответствующим углу пространственного рассогла сования между ротором данного элект ;родвигателя и ротором отстающего по углу поворота. При этом отстающий в пространственном отношении электродвигатель работает в естественном режиме вентильного электродвигателя, управляемого по сигналам со ственного датчика положения ротора, а опережающий в пространственном отношении, электродвигатель работает в квазиустановившемся. режиме: разгон режим вентильного электродвигатеЛй)- торможение на выбеге 1 режим отключения от источника питания) . Электропривод характеризует ся удовлетворительным энергетичес.кими характеристиками, однако об.ладает низкой устойчивостью. Для повышения устройчивости электропривода в переходных режимах и уменьшения углов пространственного рассогласования вышеуказанный функциональный преобразователь может быть дополнительно снабжен формирователем импульсов на временном интервале между двумя последователь:нрстями импульсов, причем длительность сформированных импульсов соответствует указанному углу пространственного рассогласования. .В этом случае отстающий в пространственном отношении электродвига тель также работает в естественном режиме вентильного электродвигателя; Управляемого по сигналам собствен(ного датчика положения ротора, а опережающий в пространственном отношении электродвигатель работает в квазиустановившемся режиме: разгон ( режим вентильного электродвигатёля - активное торможение (динамическое торможение или противовключение). Недостатком известного электродвигателя является ухудшение энерге Тических характеристик. Для электроприводов мощностью уже несколько десятков ватт не удается в полной мере решить задачу .устойчивости и снижения углов пространственного рассогласования, что особенно важно для, высокоточных систем. Это объясняется тем, что из соображений уменьшения установленной мощности, массы и габаритов полупроводникового коммутатора такие электродвигатели в обязательном порядке.снабжаются устройствами защиты от максимальных токов. Защита срабатывает при токе, в два - четыре раза превышающем номинальный . В режиме активного торможения отношение тормозного момента к вращающему не может превышать указанное значение и поэтомувеличина синхронизирукнцего момента в элект|роприводе ограничена. Кроме этого, в известном электроприводе регулирующему воздействию подвергаются электродвигатели, которые являются опережакяцими в пространственном отношении . Электродвигатель, отстающий в пространственном отношении, управляющему воздействию не подвергается. i Повышение устойчивости и уменьшение углов пространственного рассогласования в рамках известной функциональной схемы электропривода может быть получено за счет увеличения числа секций якорной обмотки синхронной, машины и эа счет выполнения ключей полупроводникового коммутатора, рассчитанных на пусковые токи или на токи противовключения (выполнение электропривода без устройства згициты- . Однако такой путь нельзя при- . знать рациональным, поскольку потребует существенного увеличения массы и габаритов полупроводникового коммутатора. Противоречивые требования макси|мальных энергетических показателей и устойчивости, а также минимальных углов пространственного рассогласования в рамках известной функциональной схемы электропривода удовлетворить невозможно. Цель изобретения - упрощение, повышение энергетических показателей и устойчивости работы электропривода в переходных процессах. Поставленная цель достигается тем, что S электроприводе, содержащем два электродвигателя, каждый из которых выполнен на базе синхронной машины с установленным на ее валу многоканальным датчиком положения ротора и -размещенной на статоре IM . -секционной якорной обмоткой, секции которой подключены к выходам полупроводникового коммутатора, к цепям управления ключей которого 1Пбдключен широтно-импульсный регуля тор, и измеритель пространственного рассогласования синхронно вращаю- , щихся механически. несвязанных ротор электродвигателей, входы которого связаны с каналами датчиков положения ротора, а выходы - с управляющими входами широтно-импульсного р& гулятора, каждая синхронная машина снабжена дополнительной Ki -секционной якорной обмоткой, секции дополнительной обмоткн первой синхронной машины соединены встречно с одноиме ными секциякш дополнительной о мотки другой синхронной ма1иины. На фиг. 1 изображена блок-схема двухдвигательного электропривода на фиг. 2 - пример реализации на элементах логики измерителя простра ственного рассогласования синхронно вращающихся механически несвязанных роторов электродвигателей на фиг.З и 4 - диаграммы напряжений в узлах двухдвигательного электропривода. Электропривод (фиг. 1 ) содержа.щий два электродвигателя 1 и 2, каж дый из которых выполнен на базе синхронной машины 3(4) с установленным на ее валу .многоканальным датчиком 5 (6 ) положения ротора и размещенной на статоре шестисекционной якорной обмоткой 7 (9), три сек ции 9 (10 ), 11 (12), 13 (14).которой подключены к выходам полупроводникового коммутатора 15 (16) к цепям управления ключей 17(18), 19 (20), 21 (22), 23 (24), 25 (26);i 27 (28), которого подключен широтно-импульсный регулятор 29 (30). Электропривод содержит измеритель 31 пространственного рассогласования синхронно ВЕащаквдихся механически несвязан - ных роторов электродвигателей, входы 32 и 33 которого связаны с каналами 34 (35), 36 (37), 38 (39), 40 (41), :42 (43), 44 (45) датчиков 5 (6) поло жения ротора, а выходы 46 и 47 - с управляющими входами 48 и 49 широтно-иьшульсныхрегуляторов 2S и 30. Каждая из оставшихся (трех) секций 50 (51), 52 (53), 54 (55) якорной обмотки 7 (8) .-синхронной машины 3 (4 соединены вс.трёчнр с одноименной секцией 51, 53,55 (50, 52, 54) якорной обмотки 8 (7).-другой синхрой ной машины 4 (3 ). Электродвигатели .подключены к источнику питания 56 постоянного напряжения. . В рамках сформулированной функциональной схемы конструктивное выполнение электродвигателей может быть различно. В частности, синхронная машина может ейать любого типа, например с возбуждением от постоянных магнитов с произвольным количеством секций якорной обмотки. Датчик положения ротора может быть любого из- вестного типа, например индуктивный; с псдмагничиванием. Полупроводниковый коммутатор может быть любого типа, например трехфазный двухполупериодный, и реализован на любых полупроводниковых переключакяцих приборах, например на транзисторах. г Формы выполнения широтно-импул1 сных регуляторов 29, 30 и измерителя 31 также могут быть различны. На,. фиг. 2 для примера показана одна из возможных форм их конструктивного объединения, выполненная на элементах логики. В данном конкретном слу-чае широтно-импульсные регуляторы |29 и 30 и измеритель 31 реализованы на двенадцати идентичных логических ячейках 57-68 по числу каналов датчиков 5 и 6 положения ротора. Каж-i дая логическая ячейка, например 57 iJ62Ji включает две двухвходовые логические схемы совпадения 69,70 (71, 72) и одну двухвходовую логическую схему ИЛИ 73 (74). Каждая логическая ячейка например, 57 (63) имеет три входа, к которым подключены каналы 34, .35, 37 (35, 34, 36 ) датчиков 5 и 6 положения ротора, и один выход, подключенный к цепи управления соответствующего ключа 17 (iS} полупроводникового коммутатора. Вхо дами каждой логической ячейки, например 57 С 63 являются входы логических схем 69, 70 71, 72 совпадения причем вторые входы этих ло гических схем объединены, входом каждой логической ячейки, например 57 (63) служит выход логической схе мы ИЛИ 73 (74 .-Схема-подключения каналов датчиков 5 и 6 положения ротора к входам логических ячеек 57 - 68 изрбражена на фиг. 2. В схе ме подключения каналов датчиков 5 к. 6 положения рртора к входам логических ячеек 57 - 68 усматривается за-; кономерность. ёта закономерность . заключается в том, что для логической ячейки, наприк1ер, 57 (63, свя-занной с цепью управления ключа 17 (18) полупроводникбвого коммутатора 15 .16, к объединенным входам логических схем 69,70 71,72 совпадения логической ячейки 57 (63) подключен соответствуквдий этому каналу канал 34 {ЗБ собственного датчика 5/6) положения ротора, а к двум Другим-входам логических схем 69, 70.(71, совпадения подключены каналы датчика б .( 5) положения рото ра другого электродвигателя 2 ( 1/: одно-именный с указанным, т.е. 35 (3 и следующий по направлению движения ротора электродвигателя, т,.е. 37 ;(З Указанная закономерность подключе1€И распрост1Ьаняется на каждую тройку логических ячеек 57 - 59, 60-62, 63 - 65, 66 - 68 и, соответственно |на 1 аждую тройку каналов. 34, 36, 38 |40, 42, 44, 35, 37, 39 и 41, 43, 45 |датчиков 5 и 6 положения ротора. Это .обеспечивается тем, чтоконец сигнала в третьем канале каждой тро ки каналов совпадает с началом сигнала в первом канале этой тройки. Такая форма выполнения гйиротноимпульсных регуляторов 29 и 30 и из мерителя 31 обеспечивает преобразование каждого сигнала датчика положения ротора опережающего в простра ственном отношении электродвигателя .сигнал с задержанным передним фронтом на интервал времени, соответствующий углу пространственного рассогласования Д между ротором данно |ГО электродвигателя и ротором от|стающего электродвигателя. . Электропривод работает следующим образом. Предположим, что роторы идентичных синхронных машин вращаются синхронно и синфазно. В этом случае сигналы с датчиков 5 и 6 положения ротора поступают на соответствующие им дели управления ключей полупроводниковых коммутаторов 15 и 16 без каких-либо преобразований. Электродвигатели работают в режиме вентиль ных электродвигателей, управляемыхпо сигналам собственных датчиков положения ротора. Наведенные в секциях 50, 52, 54 и. 51, 53, 55 .синхронных машин 3 и 4 ЭДС равны по величине. За счет встречного включе ния одноименных секций, например, секций. 50 и 51 синхронных машин 3 и 4, эти ЭДС взаимно компенсируются и токи в контурах, образованных , упомянутыми секциями 50 - 55, отбуТСТВуЮТ. В установившемся режиме работы синхронных машин 3 и 4 в общем случае вращаются синхронно, но несинфазно. Предположим, что.ро,тор синхронной машины 4 отстает от рото ра синхронной машины 3 на .угол д . Сигналы Uj4 ,Ua6 Use 40 / 4г , U44 в каналах 34, 36, 38,. 40, 42, 44 датчика 5 положения ротора опережаю в пространственном отношении одноименные, с ними сигналы Uj ,Uj7 b4i U, Ц4у s каналах 35, 37, 39, 41, 43, 45 датчика 6 положения ротора на угол Л(фиг. 3. Преобразов ние сигналов в данном случае будет осуществляться в каналах 34, 36, 38 40,42, 44 датчика 5 положения ротора. Логические ячейки 57 - 62 осуществляют преобразование каждого сигнала датчика 5 положения ротора в сигнал с задержанным передним фронтом на Интервал времени, соответствующий углу пространственного рассогласования. В цепи управления ключей 17, 19, 21, 23, 25 полупроводникового коммутатора 15 поступают преобразованные таким образом сиг- налы , (, Цу / чъг 25 Линейное напряжение- .. 9 и 11 на секциях. 9 и 11 якорной обмотки 7 имеет вид, изображенный, на фиг. 3. Опережающий электродвигат.ель 1 работает в квазиустановившемся режиме: разгон вентильного электродвигателя торможение на выбеге (режим отключения от источника питания. В цепи управления ключей 18, 20, 22, 24, 26, 28 полупроводникового коммутатора 16 поступают непреобразованные сигналы каналов 35, 37, 39, 41,43, 45 датчика 6 положения ротора. Линейное напряжение Л 10, 12 на секциях 10 и 12 якорной обмотки 8 имеет вид, изображенный на фиг.З пунктиром. Отстающий электродвигатель 2 работает в режиме вент ильного электродвигателя на естественной характеристике. Наведенные в секциях 50 - 55 синхронных машин 3 и 4 ЭДС равны по величине, поскольку роторы электродвигателей вращаются синхронно. Однако теперь ЭДС одноименных смещены друг относительно друга из синфазного- полохсения на угоЗГ пространственного рассогласования Д. Теперь уже они не компенсируют друг друга и в контурах, образованных указанными секциями, возникают результирующие ЭДС Ед и протекают уравнительные токи 1д. На фиг. 4 показаны линейные ЭДС Л 50, 52 и Л 51, 53 на секциях 50, 52 и 51, 53 якорных обмоток 7 и 8 синхронных машин 3 и 4, результирующая ЭДС Ед в контуре 50, 52, 53, 51 и протекающий в ней уравнительный ток 1д. Из-за индуктивного характера сопротивления секций якорных обмоток уравнительный ток 1д отстает по фазе на угол ( от результирующей эДС Ед. Результирующая ЭДС Ед опережает ЭДС Л 50, 52 на . и отстает от ЭДС Л 51, 53 на тот же угол-Г-д/г. Уравнительный ток 1д опережает ЭДС Л 50, 52 опережающего в пространственном отношении электродвигателя 1 на угол р и отстает от ЭДС Л 51, 53 отстающего в пространственном отношении электродвигателя 2 на угол dar-rtT- С - 4- - f)- Если индуктивное сопротивление секций якорной обмотки значительно больше ее активного сопрбтивления,, то угол f стремится к 14,2. ,(-|cfu/ .-К() . Значение углов . д невелики , поэтому уравнительный ток 1практически- находится в фазе с ЭДС Л -50, 52 и в противрфазе с ЭДС Л 51 53, в результате чего секции 50, 52 якорной хэбмотки 7 опережающего элек родвигателя 1 находятся в режиме генератора, т.е. Jpтдaют электрическую мощность, а секции 51, 53 якорной обмотки 8 отстакяЦего электродви гателя 2 находятся в режиме двигателя, т.е. потребляют электричес-i кую мощность от секций 50, 52i Тако режим работы электропривода в части создания синхронизирующего момента является с точки зрения энергетических характеристик наиболее эф:фектнвным,поскольку не связан с каким-либо дополнитёльйыми преоб.разованиями электрической энергии. Таким образом, отстающий в пространственном отношений электродвигатель подвергается управлякяцему Воздействию, поскольку секции 51, 5 Создают На валу дополнительными вра щающий момент /и к основному вращаю щему моменту. Х екции 50 и 52 работают в генераторном режиме,т.е. добавляют к меньшему моменту нагрузки на валу электродвигателя 1 тормозно момент. Благодаря этому оба электродвигателя 1 и 2 будут нагружены одинаково. Если индуктивное сопротивление секции якорной обмотки соизмеримо с ее активным сопротивлением, то угол ,f стремится к ,((K/4-A/2 и () . Характер режимов раЬоты опережающего и отстающего в пространственном отношении электродвигателей не изменяется. При этом изменяются лишь величины генераторного и двигательного моментов, развиваемых встречно включенными секциями. Таким образом, встречное включение одноименных секций 50, 52 54 и 51, 53, 55 якорных обмоток 7 и 8 синхронных машин 3 и 4 обеспечивает создание синхронизируюп го момента в электроприводе. . Вышеуказанный режим работы электропривода не в полной мере раскЕ а- вает положительный эффект,вносимый встречным включением одноименных cejc.ций электродвигателей,так как цель это го режима физику протекающих процессов и высокие энергетические характеристики электропривода. В переходных процессах(,Д-Уаи которые при отсутствии встречного включения секций носят колебательный долгозатуханадий характер, при значительных величинах углов ,Д пространственного рассогласования в полной мере проявляется демпфирующёе действие встречно включенных секций якорных обмоток. Здесь и ,1% - среднне частоты вращения электродвигателей. Из простых геометрических соотношений величину результирующей ЭДС Е. определяют следующим образом Ед 2-ЬвГи А/2 |где Ед - линейная ЭДС Л 50, 52. При угле Д It/2 результирующая ;ЭДС Е д Е И В контуре секций 50, 52, 53, 51 протекает уравнительный ток, ограниченный лишь полными сопротивлениями секций, образующими . этот контур. В указанном контуре организации синхронизирующего момента отсутствуют ключи полупроводникового коммутатора и поэтому в нем могут быть допущены значительные токи, максимальные значения которых ограничены допустимой плотностью тока в обмотке. Встречное включение одноименных секций электродвигателей обеспечи-вает создание генераторного (тор мозного) момента на валу опережающего электродвигателя и дополнительного двигательного на валу от-, . стс1ющего, что уменьшает величину уг(ла пространственного рассогласования. В переходном режиме в каждалй полупериод колебательного процесса указанные режимы работы электродвигателей чередуются, обеспечивая в каждый полупериод эффективное монотонно возрастающее в функции угла рассогласования демпфирующее дай-, ствие в электроприводе.. Экспериментальные исследования показывают, что время переходного процесса при сбросе и наборе нагруз-т ки на одном из электродвигателей npii наличии встречно включенных секций электродвигателей уменьшается при прочих равных условиях в 5-8 раз.При пуске синхронизирующее деистf вне встречно включенных секций электродвигателей Отсутствует, поскольку наведенные в. них ЭДС равны нулю.Синхро;ннзирукнцнй момент обеспечивается за счет действия широтно-импульсных регуляторов 29 и 30 измерителя 31. Однако в процессе пуска, который также при отсутствии встречно включенных секций электродвигателей носнт колебательный долгонезатухающий характер, демпфирующее плавно нарастакнцее с ростом частоты вращения действие указанных секций уменьшает амплитуду и продолжительHocTb колебаний угла пространственного рассогласования. Количество встречно включенных секций непринципиально, они могут быть гальванически развязаны от основных секция якорной обмотки {фиг.1) или же иметь с ними электрическое . соединения, например, с общим нулевым выводом в схемах однополупериодных полупроводниковых коммутаторов. Выбор обмоточных данньах указанных секций является расчетной задачей и определяется конкретным схемотехническим выполнением широтноимпульсных регуляторов.и измерителя пространственного рассогласования 1И требованиями к качеству переходны процессов в электроприводе. Изобретение характеризуется простотой, повышает энергетические показатэли и устойчивость работы в переходных режимах электропривода. Формула изобретения Многодвигательный электропривод, содержащий два электродвигателя, каж дый из которых выполнен на базе син хронной машины с установленным на .ее валу многоканальным датчиком положения ротора и размещенной на ста торе j(H -секционной якорной обмоткой секции которой подключены к выходам полупроводникового коммутатора, к цепям управления ключей которого подключен широтно-импульсный регу:лятор, и измеритель пространственного рассогласования синхронно вращающихся, механически несвязанных роторов электродвигателей, входы которого связаны с каналами датчиков положения ротора, а выходы - с управляющими входами широтно-импульсного регулятора, отличающийся тем, что, с целью уп- . рощения, повышения энергетических показателей, и устойчивости работы электропривода в переходных режимах, {каждая синхронная машина снабжена дополнительной -секционной якорной обмоткой, секции дополнительной обмотки первой синхронной машины соединены встречно с одноименными секциями дополнительной обмотки другой синхронной машины. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 395956, кл. Н 02 Р 7/68, 1973. 2.Авторское свидетельство СССР № 692050, кл. Н 02 Р 7/68, 1977. 3.Ивоботенко Б.А., Лозенко В.К. Перспективы применени я -магнитоэлектрических вентильных двигателей в многодвигательном электроприводе. Сб. Применение постоянных магнитов в электрических машинах, аппаратах и приборах. Труды МЭИ, вып. 416, М., 1979, fc. 24-32.
fra
да
39
ЧЪ
45
2Х
Фиг. It
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления многодвигательным электроприводом | 1978 |
|
SU769696A1 |
| Многодвигательный электропривод | 1978 |
|
SU942232A1 |
| Многодвигательный электропривод | 1981 |
|
SU1023613A2 |
| Многодвигательный электропривод | 1978 |
|
SU974541A2 |
| Многодвигательный электропривод | 1978 |
|
SU785938A2 |
| Двухдвигательный электропривод | 1984 |
|
SU1249687A1 |
| Вентильный электродвигатель | 1985 |
|
SU1259430A1 |
| Вентильный электродвигатель | 1983 |
|
SU1092672A1 |
| Бесконтактный электродвигатель постоянного тока | 1972 |
|
SU682985A1 |
| Многодвигательный электропривод с бесконтактными электродвигателями постоянного тока | 1973 |
|
SU520684A2 |