(54) МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1978 |
|
SU942232A1 |
| Многодвигательный электропривод | 1981 |
|
SU1023613A2 |
| Многодвигательный электропривод | 1978 |
|
SU974541A2 |
| Многодвигательный электропривод | 1981 |
|
SU1001420A1 |
| Способ управления многодвигательным электроприводом | 1978 |
|
SU769696A1 |
| Способ реверсирования частоты вращения многодвигательного электропривода | 1978 |
|
SU792522A1 |
| Многодвигательный электропривод | 1977 |
|
SU692050A1 |
| Многодвигательный электропривод с бесконтактными электродвигателями постоянного тока | 1973 |
|
SU520684A2 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| Многодвигательный синфазный электропривод | 1981 |
|
SU1066015A1 |
1
Изобретение относится к электротехнике, и может найти применение для построения систем синхронного вращения нескольких механически не связанных валов в широком диапазоне изменения нагрузки,
В основном авт.св. № 696050 описан многодвигательныи электропривод с синхронно вращающимися электродвигателями , содержащий каждый синхронную машину с датчиком положения ротора и коммутатор, в котором синхронное вращение механически не связанных валов электродвигателей обеспечивается за счет того, что многоканальный датчик положения ротора связан по части.каналов с цепью управления по крайней мере одного коммутатора через первый функциональный преобразователь сигнала в сигнал с задержанным передним фронтом на интервал времени, соответствующий углу рассогласования между ротором данного электродвигателя и ротором электродвигателя отстающего по углу поворота Ij .
Недостатком известного электропривода является значительная величина угла рассогласования и значительное время переходного процесса в
f л
электроприводе при возмущающих воздействиях.
Целью изобретения является уменьшение времени переходного процесса при возмущающих воздействиях.
Это достигается тем, что в многодвигательный электропривод Щ дополнительно введен функциональный преобразователь сигнала в последо10вательность импульсов, следующих друг за другом с интервалом времени, соответствующим выявленному углу фазового рассогласования, включенный между цепью управления ключа 15 ког 1мутатора и выходом выявителя фазового рассогласования.
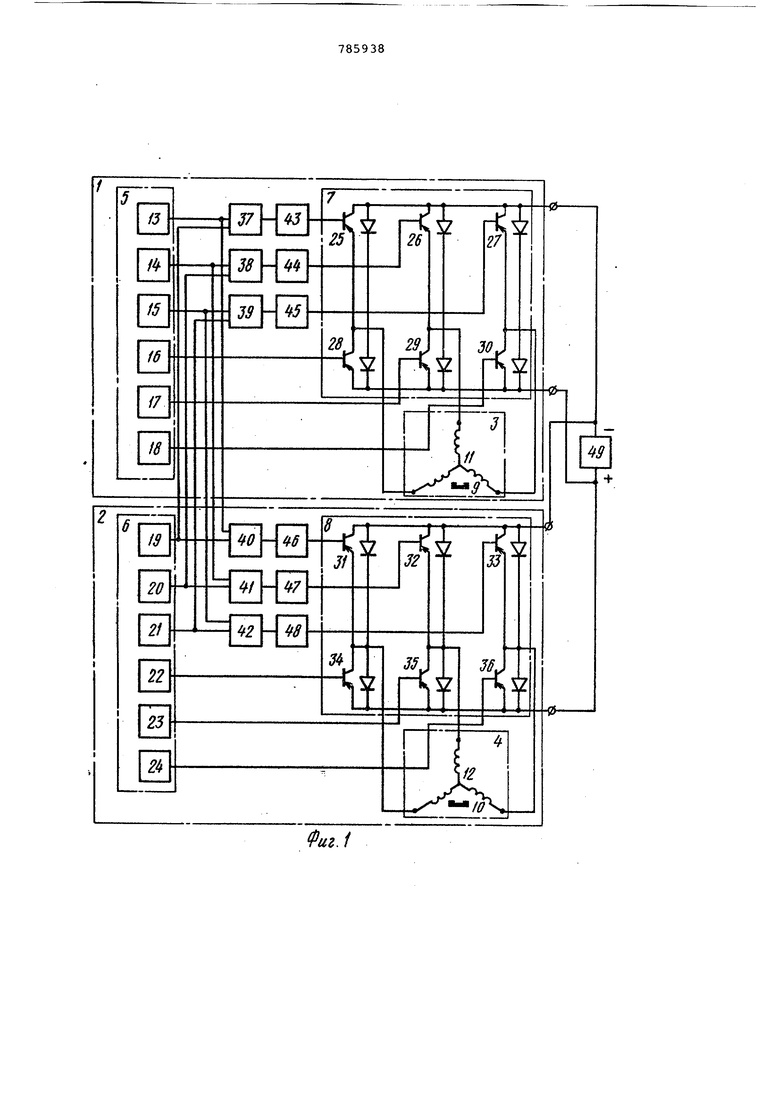
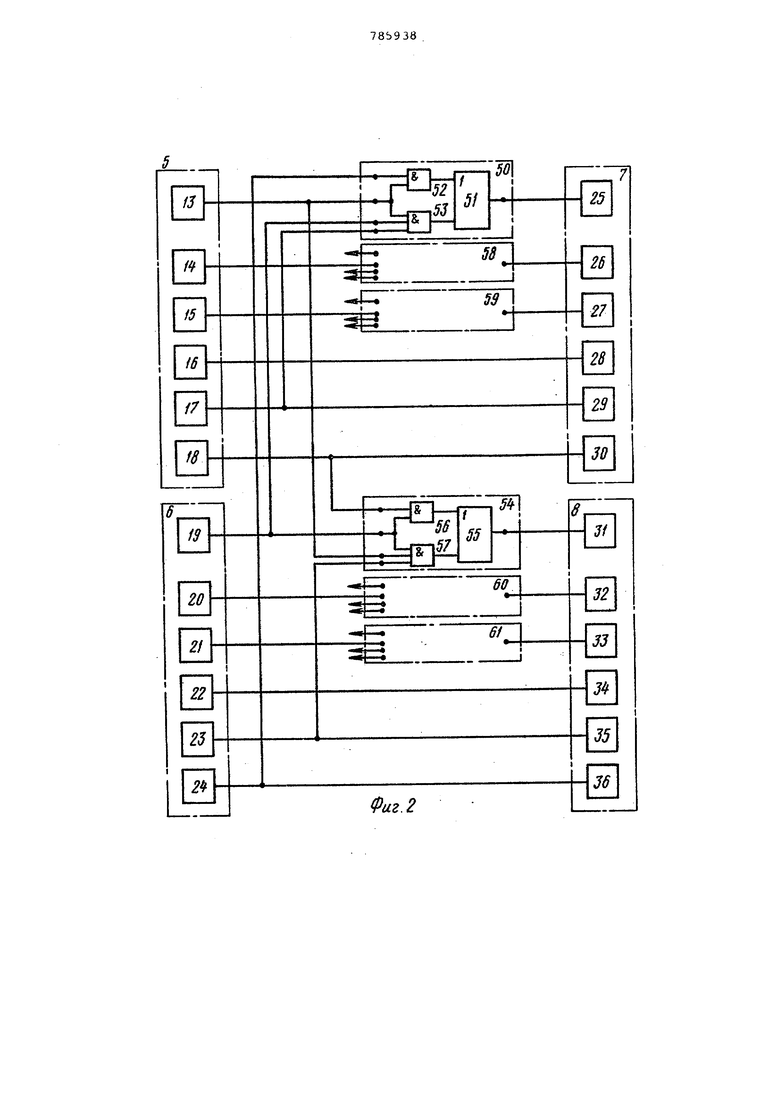
На фиг, 1 изображена блок-схема двухдвигательного электропривода на фиг. 2 - пример реализации
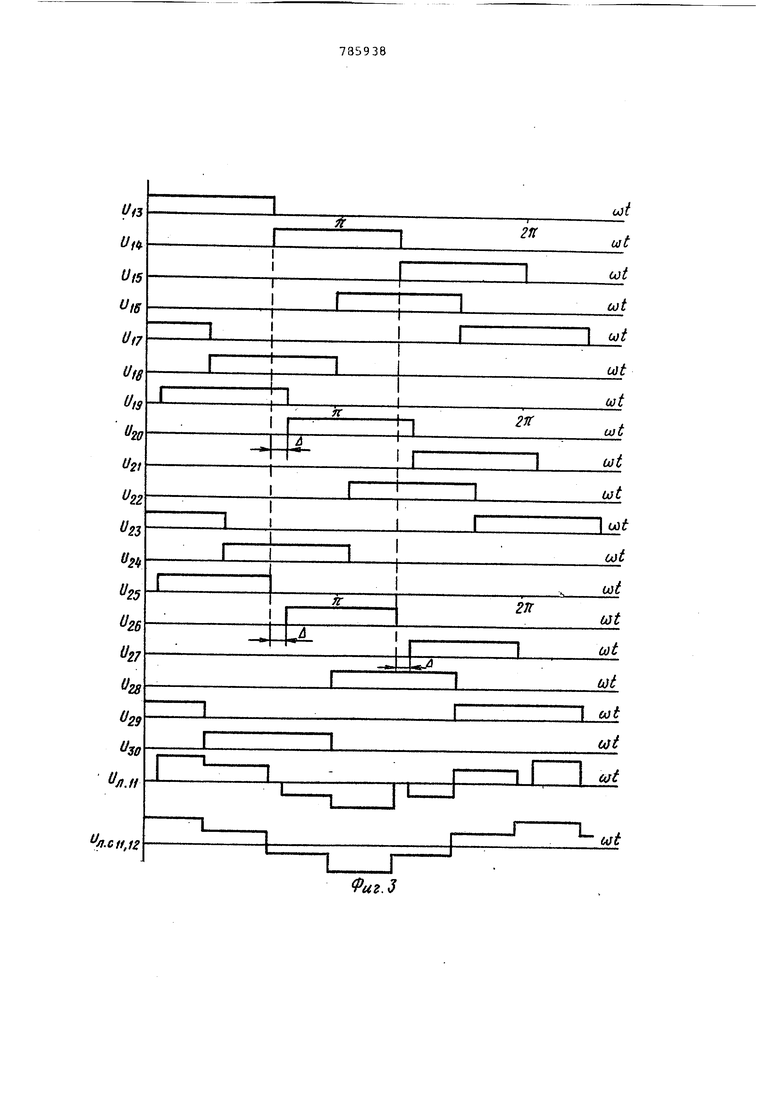
20 на элементах, логики первог.о и второго функциональных преобразователей; на фиг, 3 -.диаграмма напряжений в узлах известного двухдвигательного электропривода }
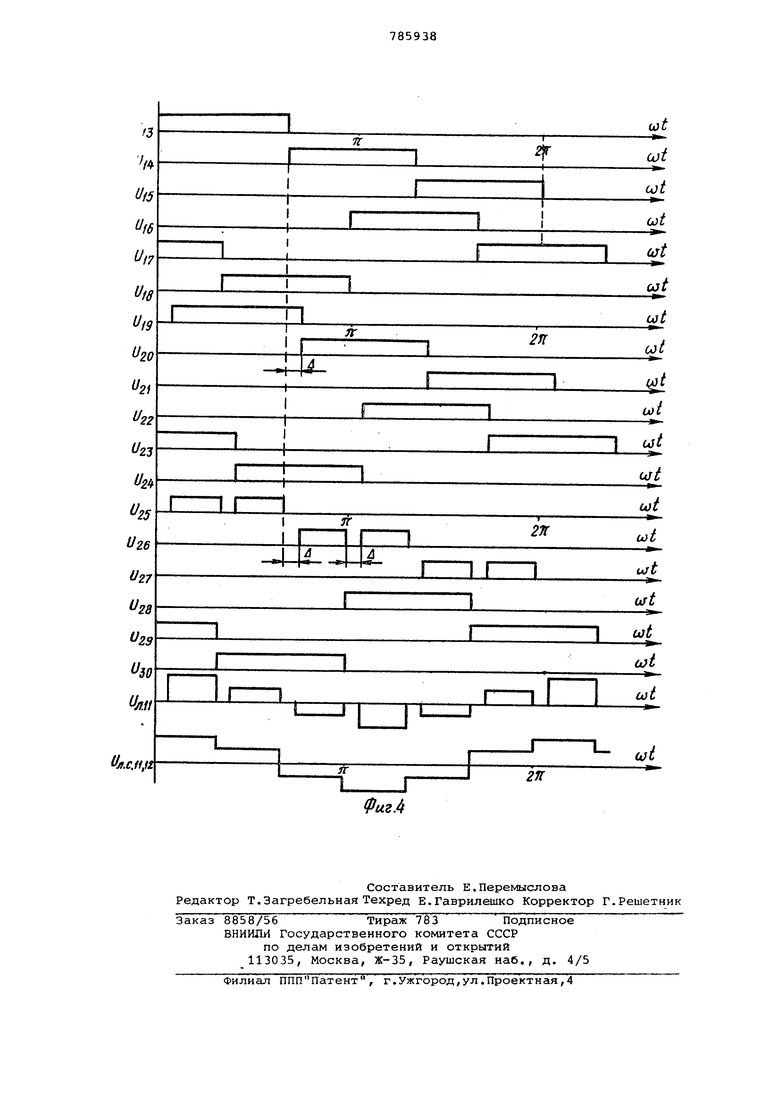
25 на фиг. 4 - диаграмма напряжений в узлах двухдвигательного электропривода, схематически изображенного на фиг, 1 и 2,
На фиг. 1 изобраухен двухдвига30 тельный электропривод с двумя электродвигателями 1 и 2, Электродвигатели 1 и 2 содержат соответственно синхронные машины 3 и 4 с многоканальными датчиками 5,6 положения ротора и двухполупериодные коммутаторы 7 и 8. Синхронные машины могут быть любого типа, например с магнитоэлектрическим возбуждением, и содержат роторы 9 и 10 и якорные обмотки 11 и 12. Датчики положения ротора могут быть любого типа, например индуктивные с подмагничиванием, и содержат в данном конкретном случае по шесть чувствительных элементов (каналов) ка;кдый, соответственно каналы 13,14,15,16,17, 18 и 19,20, 21, 22,23,24. Коммутаторы могут быть выполнены на любых известных управляемых переключающих приборах (ключах) , например транзисторах, и содержат в данном конкретном случае по шесть ключей каждый, соответственно ключи 25,26,27,28,29,30 и 31,32,33,34,35,36. Электродвигатели в данном конкретном Случае содержат по три первых функционсшьных преобразователей каясдый, соответственно преобразователи 37,33,39 и 40 41,42, осуществляющие преобразование сигнала датчика в сигнал с задержанным передним фронтом на интервал времени, соответствующий углу рассогласования между ротором данного электродвигателя и ротором электродвигателя отстающего по углу поворота. Электродвигатели в данном конкретном случае содержат по три вторых функциональных преобразователя, соответственно преобразователи 43,44,45 и 46,47,48, осуществляющие преобразование сигнала с задержанным передним фронтом в последовательность импульсов, следующих друг за другом с интервалом времени, сооветствующим указанному углу рассогласования. Электродвигатели 1 и 2 подключены к -источнику электроэнергии любого типа, например источнику 49 постоянного тока.
Якорные обмотки 11 и 12 синхронных машин 3 и 4 подключены к выходам коммутаторов 7 и 8.
Многоканальные датчики 5,6 положения.ротора по части каналов (чу;зствитальных элементов 16,17,1 и 22,23,24 связаны с цепями управлений ключей 28,29,30 и 34,35,36 коммуцаторов 7 и 8 соответственно. По другой части каналов (чувствительных элементов) 13,14,15 и 19,20,21 датчики 5 ,.6 положения роте 4 связаны с цепями управления ключей 25,26,27 и 31,32,33 коммутаторов 7 и 8 в каждом канале через первый и второй функциональные преобразователи 37,43, 38,44; 39,45; 40,46, 41,47 и 42,48 соответственно. Первые функциональные преобразователи 37,38,39 и 40,41,42 электродвигателей 1 и 2 связаны с каналами 19,20, 21 и 13,14,15 датчиков 5,6 пололсения ротора. Эти связи являются необходимыми (но не достаточными) и показаны условно в том , что каждый конкретный первый функциональный преобразователь, например преобразователь 37, осуществляет преобразование сигнала канала 13 датчика 5 положения ротора в сигнап с задержанным передним фронтом на .интервал времени, соответствующий углу рассогласования меяоду ротором 9 данного электродвигателя 1 и ротором 10 электродвигателя, отстающего по углу поворота, и измеренный с помощь сигнала одноименного с каналом 13 канала 19 датчика 6 положения ротора
На фиг. 2 показан пример реализации на элементах логики первого и второго функциональных преобразователей на примере двухдвигательного электропривода, изображенного на фиг.1.
Первый и второй функциональные преобразователи электродвигателя 1, например преобразователи 37 и 43, могут быть реализованы с помощью логической ячейки 50, включающей одну двухвходовую логическую схему ИЛИ 51 и две совпадения, одна из которых двухвходовая схема 52, а другая - трехвходовая схема 53.
Первый и второй функциональные преобразователи 40 и 46 электродвигателя 2 реализованы соответственно логической ячейкой 54, включающей аналогичные логически схемы 55,56, 57. К двум входам схеьм совпадения подключены канал 13 датчика 5 и канал 24 датчика 6, а к входам схемы совпадения 52 подключены каналы 13 и 17 датчика 5 и канал 19 датчика 6. Выходы схем совпадения 53 и 52 подключены к входам логической схемы ИЛИ 51, выход которой подключен к цепи управления ключа 25 коммутатора 7. Аналогичные соединения выполнены и для логических схем 53,55 электродвигателя 2. В каналах 14, 15,20,21 датчиков 5 и 6 включены соединенные аналогично логические ячейки 58,59,60,61..
Работа известного и предлагаемого электроприводов поясняется диаграммами напряжений в их узлах на фиг. 3 и 4,
Известный, электропривод работает следугадим образом. Роторы9 и 10 в общем случае вращаются синхронно, но несинфазно. Предположим, что ротор 10 отстает от ротора 9 на угол Д . Сигналы в каналах датчика 6 lj|gU24отстают в фазовом отношении от одноименных с ними сигналов в каналах датчика 5 на угол Д Первые функциональные преобразователи 37,38,39 электродвигателя 1 осуществляют преобразование сигнала в каждом канале в сигнал с задержанным передним фронтом на 1днтервал времени, соответствуюищй углу рассогласований Д между роторами 9 и 10. В соответствии с этим на ключи 25-27 когимутатора 7 поступают преобразованные сигналы (J/2 - 27 ключи 28-30 коммутатора 7 и на ключи 31-36 коммутатора 8 электродвигателя 2 поступают непреобразованные сигналы с каналов 16-18 датчика S&jg- ls и датчика Ui . Функциональные преобразователи 40-42 не осуществляю преобразования, поскольку ротор 10 электродвигателя 2 отстает в фазовом отношении от ротора 9 электродвигателя 1. Линейное напряжение U на якорной обмотке 11 для рассматриваемого случая изображено на фиг. 3. Для сравнения там же изображена форма линейного напряжения ,c.-n,i2 на якорных обмотках 11 и 12 при синфазном вращении роторов электродвигателей 1 и 2. Электропривод в этом же случае, т.е. когда ротор 10 отстает от ротора 9 на угол Д , работает еледующим образом. Сигналы в каналах датчика 6 iJ JQ U 24 отстают в фазовом отношении от одноименных с ним сигналови|с -l/ jg в каналах датчика 5 на угол U Преобразование сигналов в данном случае будет осуществляться в каналах 13,14,15 датчика 6 первыми и вто рыми функциональными преобразователя ми . Причем первьлй функциональный преобразователь, например преобразователь 38, осуществляет задержку переднего фронта за интервал времени, соответствующий углу рассогласования Д между роторами 9 и 10, а второй - дальнейшее преобразование сигнала в последовательность импульсов и2(t I с1ледующих друг за другом с интервалом времени, соответствующим указанному углу рассогласования Д . Сигналы в каналах 16,17,18 датчика 5 без преобразований поступают в цепи управления ключей 28,29,30 {U2,Ll2q , U Q) функциональные преоб-: разователи электродвигателя 2 не осуществляют преобразования, поскольку его ротор отстает в фазовом отношении от ротора 9 электродвигателя 1, Линейное напряжение U.;|;( на якорной обмотке 11 для рассматриваемого случая изображено на фиг.4. При синфазном вращении роторов электродвигателей 1 и 2 форма линейного напряжения l.c.лл,1 на якорных обмотках 11 и 12 представлена на фиг. 4. Сравнение линейных напряхсеипй -А.-Ц ) реализуемых в известном и предложенном электроприводах и изображенных соответственно на фиг.З и фиг.4, показывает, что при одной и той же величине угла рассогласования Л величина линейного напряжения и 4 в предложенном электроприводе (фиг.4) меньше, чем величина линейного напряжения в известном I . Это означает, что определенная величина угла рассогласования Л соответствует большей величине разности моментов нагрузок на валах первого и второго электродвигателей, или определенной величине разности моментов нагрузок соответствует меньшая величина угла рассогласования между синхронно вращающимися роторами электродвигателей. Это важно для особо точных электроприводов, где кроме синхронного вращения, необходимо минимальное фазовое рассогласование. Уменьшение времени переходного процесса в предложенном электроприводе при возмущающих воздействиях например при сбросе нагрузки на , ; одном из электродвигателей, достигается за счет того, что ротор этого электродвигателя при прочих равных условиях должен сместиться в фазовом отношении на меньшей угол (относительно ротора другого электродвигателя ) . Формула изобретения Многодвигательный электропривод . по авт.св. 692050, отличающийся тем, чтОу с целью уменьшения времени переходного процесса при возмущающих воздействиях, дополнительно введен функциональный преобразователь сигнала в последовательность импульсов, следукадих друг за другом с интервалом времени, соответствующим выявленному углу фазового рассогласования, включенный между цепью управления ключа коммутатора и выходом выявителя фазового рассогласования. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 692050, кл. Н 02 Р 7/62, 1977.
fc./
JIXJIJl I
(jt}i
2П
ФигЛ IZJ.
